TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150788
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051857
出願日
2024-03-27
発明の名称
作業支援システム
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/26 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】GNSSアンテナの取付位置の変化を検出してユーザに通知することによって、作業支援機能のダウンタイムを短縮化することを目的とする。
【解決手段】作業支援システム100は、測位衛星からの衛星信号を受信するGNSSアンテナ12と、GNSSアンテナ12の位置データを取得するGNSS受信機5と、作業機械1の各部の位置を計算する制御装置13と、制御装置13の計算結果を表示するモニタ15と、を備え、制御装置13は、作業機械1に対するGNSSアンテナ12のデフォルトの取付位置を示す校正パラメータを記憶する記憶部13dと、位置データと校正パラメータとに基づいて、作業機械1に対するGNSSアンテナ12の取付位置がデフォルトの取付位置から変化したことを検出する検出部13aと、を有し、モニタ15は、検出部13aの検出結果を表示する。
【選択図】図4
特許請求の範囲
【請求項1】
作業機械の操作を支援する作業支援システムであって、
前記作業機械の各部の姿勢を計測する姿勢計測装置と、
測位衛星からの衛星信号を受信するGNSSアンテナと、
前記GNSSアンテナによって受信された前記衛星信号に基づいて前記GNSSアンテナの位置データを取得するGNSS受信機と、
前記姿勢計測装置の計測結果と前記GNSS受信機によって取得された前記位置データとに基づいて、前記作業機械の前記各部の位置を計算する制御装置と、
前記制御装置の計算結果を表示するモニタと、を備え、
前記制御装置は、
前記作業機械に対する前記GNSSアンテナのデフォルトの取付位置を示す校正パラメータを記憶する記憶部と、
前記GNSS受信機によって取得された前記位置データと前記記憶部に記憶された前記校正パラメータとに基づいて、前記作業機械に対する前記GNSSアンテナの取付位置が前記デフォルトの取付位置から変化したことを検出する検出部と、を有し、
前記モニタは、前記検出部の検出結果を表示する
ことを特徴とする作業支援システム。
続きを表示(約 2,600 文字)
【請求項2】
前記作業機械は、自走可能な下部走行体と、前記下部走行体に対して旋回可能に設置された上部旋回体と、を備え、
前記GNSSアンテナは、前記上部旋回体に取り付けられた一対のGNSSアンテナによって構成され、
前記GNSS受信機は、前記上部旋回体の旋回動作中の期間を含む所定期間において各GNSSアンテナの前記位置データを取得し、
前記制御装置は、前記各GNSSアンテナの前記取付位置の変化を診断する診断部を有し、
前記記憶部は、前記各GNSSアンテナの前記校正パラメータを記憶し、
前記診断部は、前記所定期間において前記GNSS受信機によって取得された前記各GNSSアンテナの前記位置データと、前記記憶部に記憶された前記各GNSSアンテナの前記校正パラメータとに基づいて、前記各GNSSアンテナの前記取付位置の前記変化を診断し、
前記モニタは、前記診断部の診断結果を表示する
ことを特徴とする請求項1に記載の作業支援システム。
【請求項3】
前記診断部は、
前記所定期間において前記GNSS受信機によって取得された前記各GNSSアンテナの前記位置データに基づいて、前記上部旋回体の前記旋回動作に伴って旋回した前記各GNSSアンテナが描く軌跡の半径を計算し、
前記記憶部に記憶された前記校正パラメータが示す前記取付位置に前記各GNSSアンテナが存在し前記上部旋回体の前記旋回動作に伴って旋回すると仮定した場合に前記各GNSSアンテナが描く軌跡の半径を計算し、
前記位置データに基づいて計算された前記半径と、前記校正パラメータに基づいて計算された前記半径とを比較することによって、前記各GNSSアンテナの前記取付位置が変化したことを検出する
ことを特徴とする請求項2に記載の作業支援システム。
【請求項4】
前記診断部は、
前記所定期間において前記GNSS受信機によって取得された前記各GNSSアンテナの前記位置データと、前記記憶部に記憶された前記各GNSSアンテナの前記校正パラメータとに基づいて、前記上部旋回体の前記旋回動作に伴って旋回する前記各GNSSアンテナの旋回中心位置を計算し、
計算された前記各GNSSアンテナの前記旋回中心位置を互いに比較することによって、一方の前記GNSSアンテナの前記取付位置が他方の前記取付位置に対して高さ方向に変化したことを検出する
ことを特徴とする請求項2に記載の作業支援システム。
【請求項5】
前記制御装置は、前記一対のGNSSアンテナの何れかの前記取付位置が変化したことが前記診断部によって検出された場合に前記記憶部に記憶された前記校正パラメータを更新する更新部を有し、
前記更新部は、
前記所定期間において前記GNSS受信機によって取得された前記各GNSSアンテナの前記位置データと、前記記憶部に記憶された前記各GNSSアンテナの前記校正パラメータとに基づいて、前記取付位置が変化した前記GNSSアンテナにおける位置変化後の前記取付位置を示す新たな校正パラメータを計算し、
計算された前記新たな校正パラメータを用いて、前記記憶部に記憶された前記校正パラメータを更新し、
前記モニタは、前記更新部の更新結果を表示する
ことを特徴とする請求項3に記載の作業支援システム。
【請求項6】
前記制御装置は、前記一対のGNSSアンテナの両方の前記取付位置が変化したことが前記診断部によって検出された場合、前記GNSSアンテナの前記取付位置をユーザが校正するようユーザに要求するメッセージを、前記モニタに表示させる
ことを特徴とする請求項3に記載の作業支援システム。
【請求項7】
前記制御装置は、一方の前記GNSSアンテナの前記取付位置が他方の前記取付位置に対して高さ方向に変化したことが前記診断部によって検出された場合、前記GNSSアンテナの前記取付位置をユーザが校正するようユーザに要求するメッセージを、前記モニタに表示させる
ことを特徴とする請求項4に記載の作業支援システム。
【請求項8】
前記制御装置は、前記作業機械が走行動作中である場合、又は、前記各GNSSアンテナにおける前記衛星信号の受信状況に起因して測位精度が確立されていない場合、前記各GNSSアンテナの前記取付位置の前記変化の診断を中断することをユーザに通知するメッセージを、前記モニタに表示させる
ことを特徴とする請求項2に記載の作業支援システム。
【請求項9】
作業機械と、前記作業機械を管理する管理サーバと、前記管理サーバにアクセス可能なユーザ端末と、を含み、前記作業機械の操作を支援する作業支援システムであって、
前記作業機械は、
前記作業機械の各部の姿勢を計測する姿勢計測装置と、
測位衛星からの衛星信号を受信するGNSSアンテナと、
前記GNSSアンテナによって受信された前記衛星信号に基づいて前記GNSSアンテナの位置データを取得するGNSS受信機と、
前記姿勢計測装置の計測結果と前記GNSS受信機によって取得された前記位置データとに基づいて、前記作業機械の前記各部の位置を計算する制御装置と、
前記制御装置の計算結果を前記管理サーバに送信する通信装置と、を備え、
前記制御装置は、
前記作業機械に対する前記GNSSアンテナのデフォルトの取付位置を示す校正パラメータを記憶する記憶部と、
前記GNSS受信機によって取得された前記位置データと前記記憶部に記憶された前記校正パラメータとに基づいて、前記作業機械に対する前記GNSSアンテナの取付位置が前記デフォルトの取付位置から変化したことを検出する検出部と、を有し、
前記通信装置は、前記検出部の検出結果を前記管理サーバに送信し、
前記管理サーバは、前記ユーザ端末からの要求に応答して、前記検出部の前記検出結果を前記ユーザ端末に送信し、
前記ユーザ端末は、前記検出部の前記検出結果を表示する
ことを特徴とする作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
油圧ショベル又はホイールローダ等の作業機械には、マシンガイダンス(MG)又はマシンコントロール(MC)等の、作業機械の操作を支援する作業支援機能が搭載されている。作業支援機能を実現する作業支援システムは、慣性計測装置(IMU)及びGNSS受信機等の様々な装置によって構成され、作業機械の各部の位置を計算する。これらの装置又は装置に関するパラメータに異常が発生すると、作業支援システムは、作業機械の各部の位置を正確に計算することができなくなる。例えば、油圧ショベルに搭載された作業支援システムは、バケットの爪先位置を数cmの精度で計算するが、これらのセンサに異常が発生すると、正しい爪先位置を計算することができなくなる。
【0003】
特許文献1には、作業支援システムによって計算された爪先位置と施工目標面との差分が所定値を超えた場合に、GNSS受信機等のセンサを含むマシンガイダンスの状態を一定時間記録(スナップショット)し、その原因を診断する技術が開示されている。特許文献1に開示された技術によって、ユーザは、作業支援システムを構成する装置又はGNSSの測位環境の異常をいち早く認識することができる。
【先行技術文献】
【特許文献】
【0004】
特許第7142151号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、GNSS関連の異常の原因の1つには、作業機械に対するGNSSアンテナの取付位置がデフォルトの取付位置から変化してしまうことがある。GNSSアンテナは、作業機械に対して着脱可能に取り付けられていることが多く、例えばGNSSアンテナの交換又は経年劣化等によって、その取付位置が変化してしまう可能性がある。GNSSアンテナの取付位置の変化は、GNSS受信機自身では検出することができないので、アプリケーション向けの制御装置内で検出する必要がある。特許文献1には、GNSS関連の異常の検出について数多く開示されているが、GNSSアンテナの取付位置の変化に関する具体的な検出方法については開示されていない。
【0006】
前述の事情に鑑みて、本発明は、GNSSアンテナの取付位置の変化を検出してユーザに通知することによって、作業支援機能のダウンタイムを短縮化することを目的とする。
【課題を解決するための手段】
【0007】
前述の上記課題を解決するために、本発明の作業支援システムは、作業機械の操作を支援する作業支援システムであって、前記作業機械の各部の姿勢を計測する姿勢計測装置と、測位衛星からの衛星信号を受信するGNSSアンテナと、前記GNSSアンテナによって受信された前記衛星信号に基づいて前記GNSSアンテナの位置データを取得するGNSS受信機と、前記姿勢計測装置の計測結果と前記GNSS受信機によって取得された前記位置データとに基づいて、前記作業機械の前記各部の位置を計算する制御装置と、前記制御装置の計算結果を表示するモニタと、を備え、前記制御装置は、前記作業機械に対する前記GNSSアンテナのデフォルトの取付位置を示す校正パラメータを記憶する記憶部と、前記GNSS受信機によって取得された前記位置データと前記記憶部に記憶された前記校正パラメータとに基づいて、前記作業機械に対する前記GNSSアンテナの取付位置が前記デフォルトの取付位置から変化したことを検出する検出部と、を有し、前記モニタは、前記検出部の検出結果を表示することを特徴とする。
【0008】
また、本発明の作業支援システムは、作業機械と、前記作業機械を管理する管理サーバと、前記管理サーバにアクセス可能なユーザ端末と、を含み、前記作業機械の操作を支援する作業支援システムであって、前記作業機械は、前記作業機械の各部の姿勢を計測する姿勢計測装置と、測位衛星からの衛星信号を受信するGNSSアンテナと、前記GNSSアンテナによって受信された前記衛星信号に基づいて前記GNSSアンテナの位置データを取得するGNSS受信機と、前記姿勢計測装置の計測結果と前記GNSS受信機によって取得された前記位置データとに基づいて、前記作業機械の前記各部の位置を計算する制御装置と、前記制御装置の計算結果を前記管理サーバに送信する通信装置と、を備え、前記制御装置は、前記作業機械に対する前記GNSSアンテナのデフォルトの取付位置を示す校正パラメータを記憶する記憶部と、前記GNSS受信機によって取得された前記位置データと前記記憶部に記憶された前記校正パラメータとに基づいて、前記作業機械に対する前記GNSSアンテナの取付位置が前記デフォルトの取付位置から変化したことを検出する検出部と、を有し、前記通信装置は、前記検出部の検出結果を前記管理サーバに送信し、前記管理サーバは、前記ユーザ端末からの要求に応答して、前記検出部の前記検出結果を前記ユーザ端末に送信し、前記ユーザ端末は、前記検出部の前記検出結果を表示することを特徴とする。
【発明の効果】
【0009】
本発明によれば、GNSSアンテナの取付位置の変化を検出してユーザに通知することによって、作業支援機能のダウンタイムを短縮化することができる。
【図面の簡単な説明】
【0010】
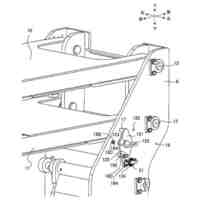
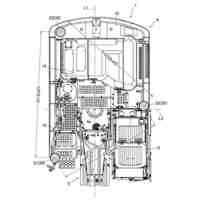
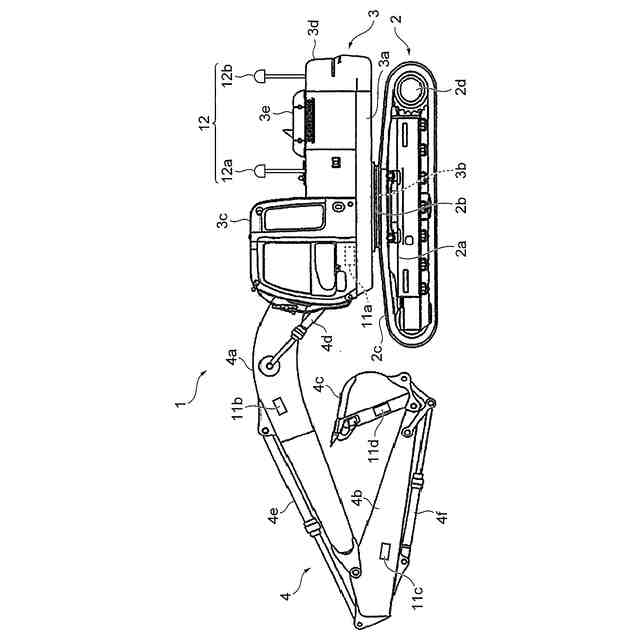
作業機械の外観構成を示す側面図。
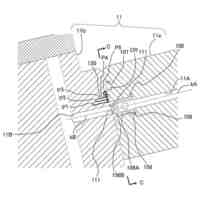
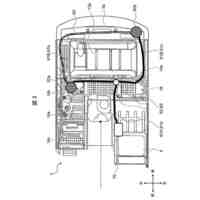
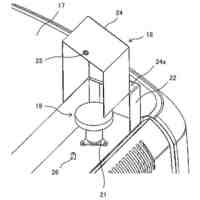
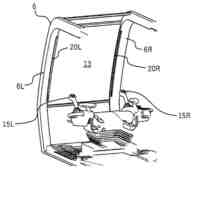
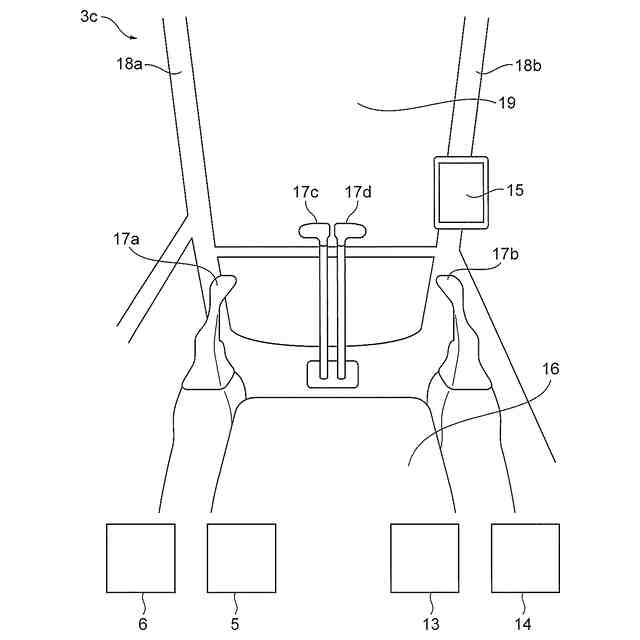
図1に示すキャビンの内部を運転席の後方から視た図。
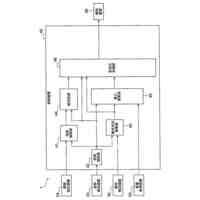
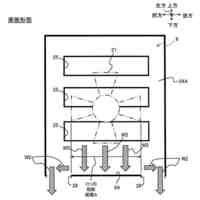
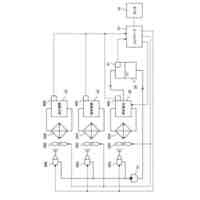
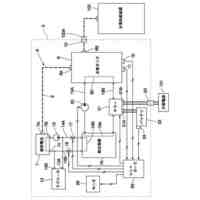
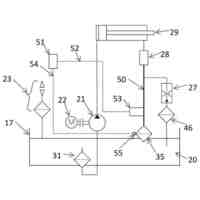
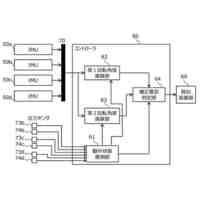
作業支援システムの構成を説明する図。
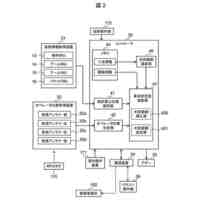
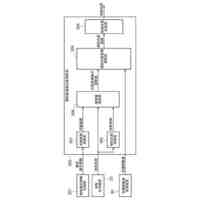
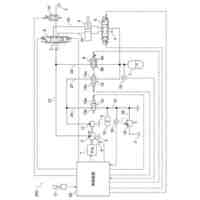
図3に示す制御装置の機能的構成を説明するブロック図。
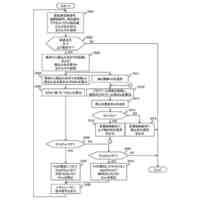
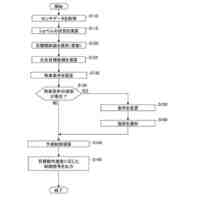
図4に示す制御装置によって行われるメイン処理のフローチャート。
図5に続けて行われるメイン処理のフローチャート。
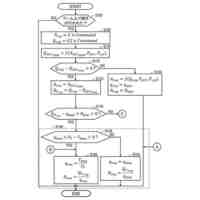
図5のステップS102に示す検出処理のフローチャート。
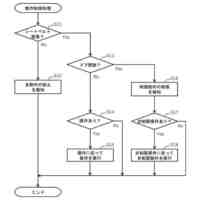
図5のステップS107に示す診断処理のフローチャート。
図8に続けて行われる診断処理のフローチャート。
図6のステップS115に示す更新処理のフローチャート。
図10に続けて行われる更新処理のフローチャート。
診断要求メッセージの表示例を示す図。
校正不要メッセージの表示例を示す図。
手動校正要求メッセージの表示例を示す図。
診断失敗メッセージの表示例を示す図。
診断失敗メッセージの表示例を示す図。
更新成功メッセージの表示例を示す図。
更新失敗メッセージの表示例を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
14日前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
15日前
日立建機株式会社
建設機械
15日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ