TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148156
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048772
出願日
2024-03-25
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
E02F
9/20 20060101AFI20250930BHJP(水工;基礎;土砂の移送)
要約
【課題】遠隔操作時における作業機械の転倒危険性をより早期にオペレータに報知することができる作業機械の提供。
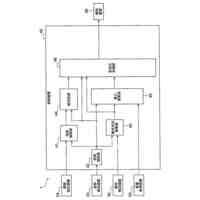
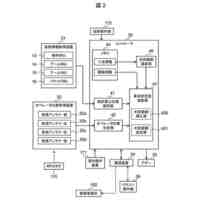
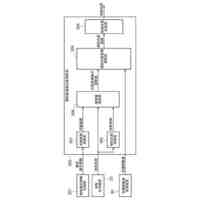
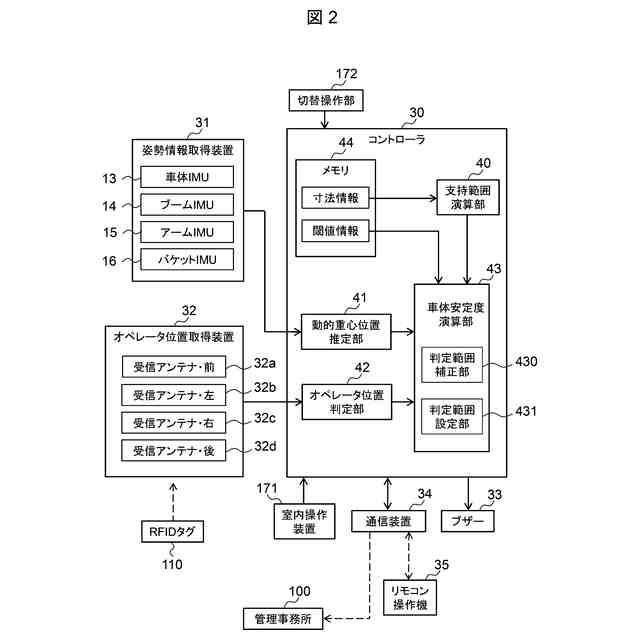
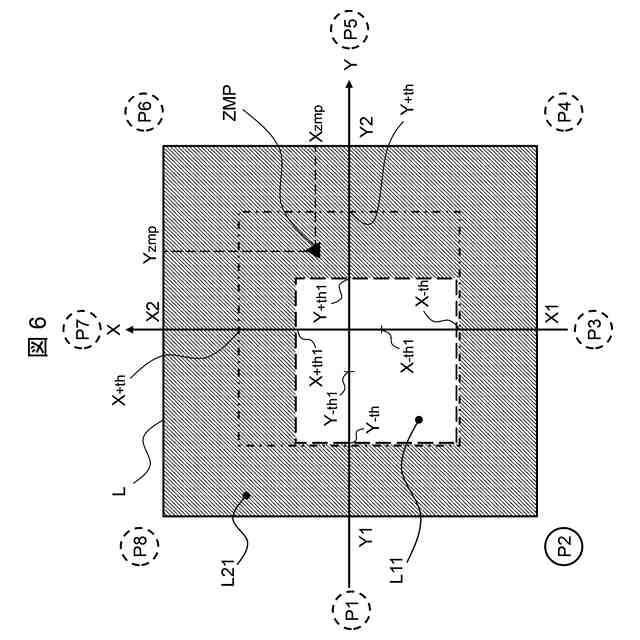
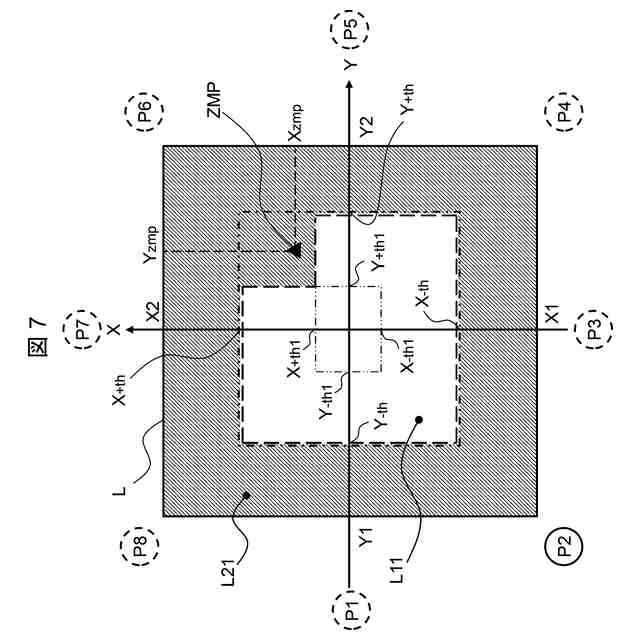
【解決手段】作業機械1は、作業機械のZMPを推定する動的重心位置推定部41と、車体の支持範囲Lを演算する支持範囲演算部40と、取得された位置情報から車体に対するオペレータの位置P1~P8を判定するオペレータ位置判定部42と、支持範囲Lの内側に高安定範囲L1を設定する判定範囲設定部431と、位置P1~P8に基づいて補正後高安定範囲L11を生成する判定範囲補正部430と、ZMPが補正後高安定範囲L11内にある場合には安定度が高いと判定し、補正後高安定範囲L11内にない場合には安定度が低いと判定する車体安定度演算部43と、車体安定度演算部43の判定情報を出力するブザー33と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられた作業機と、
前記車体および前記作業機の姿勢情報を取得する姿勢情報取得装置と、
前記姿勢情報取得装置により取得された姿勢情報に基づき前記車体および前記作業機を制御する制御装置と、を備えた作業機械であって、
前記車体を遠隔から操作するオペレータの位置情報を取得するオペレータ位置情報取得装置を備え、
前記制御装置は、
前記姿勢情報に基づいて前記作業機械の動的重心位置を推定する動的重心位置推定部と、
前記車体の寸法情報に基づいて前記車体の接地点で構成される支持範囲を演算する支持範囲演算部と、
前記オペレータ位置情報取得装置で取得された前記位置情報から前記車体に対する前記オペレータの相対位置を判定するオペレータ位置判定部と、
前記支持範囲の内側に安定判定範囲を設定する判定範囲設定部と、
前記オペレータ位置判定部により演算された前記オペレータの位置に基づいて、前記安定判定範囲を補正してより狭い補正後安定判定範囲を生成する判定範囲補正部と、
前記動的重心位置が前記補正後安定判定範囲内にある場合には前記車体の安定度が高いと判定し、前記動的重心位置が前記補正後安定判定範囲内にない場合には前記車体の安定度が低いと判定する車体安定度演算部と、
前記車体安定度演算部の判定情報を出力する情報出力装置と、
を備え、
前記判定範囲補正部は、前記車体を挟んで前記オペレータの位置と反対側の範囲が狭くなるように前記安定判定範囲を補正し、
前記情報出力装置は、前記車体安定度演算部により、前記車体の安定度が低いと判定されると、前記判定情報を出力する
ことを特徴とする作業機械。
続きを表示(約 330 文字)
【請求項2】
請求項1に記載の作業機械において、
前記情報出力装置は前記判定情報を操作装置に出力し、
前記操作装置は前記判定情報を前記オペレータに提示する、作業機械。
【請求項3】
請求項1に記載の作業機械において、
遠隔操作運転と前記車体の操作装置による搭乗操作運転との切り替え操作を行う切替操作部を備え、
前記車体安定度演算部は、
前記切替操作部により前記遠隔操作運転に切り替えられると、前記補正後安定判定範囲に基づいて前記判定を行い、
前記切替操作部により前記搭乗操作運転に切り替えられると、前記補正後安定判定範囲に代えて前記安定判定範囲に基づいて前記判定を行う、
作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
作業機械の一例として、例えば油圧ショベルがある。油圧ショベルは下部走行体を有し、この下部走行体の上部には旋回装置を介して上部旋回体が設けられる。上部旋回体には土砂の掘削等の作業を行う作業装置が設けられている。作業装置は、上部旋回体に対して俯仰動作可能に連結したブームと、このブームの先端に上下方向に回動可能に連結したアームとを備える。アームの先端には、リンク機構を介して連結されアタッチメントとして掘削等の作業を行うバケットが設けられている。
【0003】
油圧ショベル等の作業機械は、作業中に車体が転倒しないように車体安定度が高い状態で作業を行う必要がある。車体安定度とは車体の転倒し難さを表す指標であり、例えば、特許文献1には、車体安定度を判定できる作業機械が開示されている。作業機械の操作室には、判定結果を搭乗しているオペレータに通知する情報出力装置を備えている。
【0004】
また、作業機械には、オペレータが搭乗して操作するものの他に、作業機械に無線通信の受信機を搭載し、対応する送信機を持ったオペレータが作業機械を目視できる位置から操作するものが一般的に知られている。
【先行技術文献】
【特許文献】
【0005】
特許第6877385号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、オペレータが搭乗せず送信機により遠隔から作業機械を操作する場合、オペレータは作業機械の傾きや路面の状態を目視で確認して作業機械の車体安定度を推測することになる。遠隔操作では、搭乗操作のように作業機械の傾きをオペレータが体感できないので、搭乗して操作する場合に比べ、作業機械の転倒を抑止しつつ操作することが難しい。特に、オペレータから見て作業機械の陰になる箇所は死角となるため、死角方向に作業機械の傾いた場合に作業機械の転倒を防ぎつつ操作することは難しい。
本発明の目的は、搭乗せずに作業機械の近場より目視しながら作業機械を遠隔操作する場合に、死角方向に作業機械が傾いて作業機械が転倒するのを抑制する作業機械を提供することにある。
【課題を解決するための手段】
【0007】
本発明の態様による作業機械は、車体と、前記車体に取り付けられた作業機と、前記車体および前記作業機の姿勢情報を取得する姿勢情報取得装置と、前記姿勢情報取得装置により取得された姿勢情報に基づき前記車体および前記作業機を制御する制御装置と、を備えたものであって、前記車体を遠隔から操作するオペレータの位置情報を取得するオペレータ位置情報取得装置を備え、前記制御装置は、前記姿勢情報に基づいて前記作業機械の動的重心位置を推定する動的重心位置推定部と、前記車体の寸法情報に基づいて前記車体の接地点で構成される支持範囲を演算する支持範囲演算部と、前記オペレータ位置情報取得装置で取得された前記位置情報から前記車体に対する前記オペレータの相対位置を判定するオペレータ位置判定部と、前記支持範囲の内側に安定判定範囲を設定する判定範囲設定部と、前記オペレータ位置判定部により演算された前記オペレータの位置に基づいて、前記安定判定範囲を補正してより狭い補正後安定判定範囲を生成する判定範囲補正部と、前記動的重心位置が前記補正後安定判定範囲内にある場合には前記車体の安定度が高いと判定し、前記動的重心位置が前記補正後安定判定範囲内にない場合には前記車体の安定度が低いと判定する車体安定度演算部と、前記車体安定度演算部の判定情報を出力する情報出力装置と、を備え、前記判定範囲補正部は、前記車体を挟んで前記オペレータの位置と反対側の範囲が狭くなるように前記安定判定範囲を補正し、前記情報出力装置は、前記車体安定度演算部により、前記車体の安定度が低いと判定されると、前記判定情報を出力する。
【発明の効果】
【0008】
本発明によれば、遠隔操作時における作業機械の転倒危険性をより早期にオペレータに報知することができ、作業機械の転倒を未然に防止することができる。
【図面の簡単な説明】
【0009】
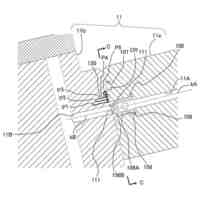
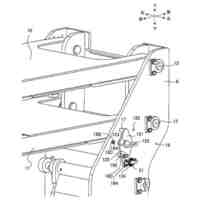
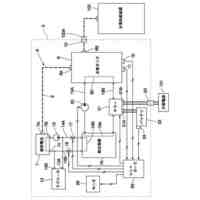
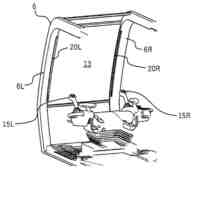
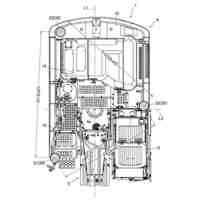
油圧ショベルの外観を示す図である。
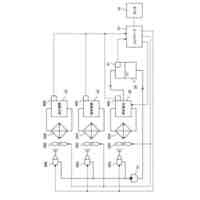
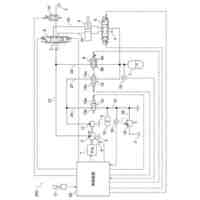
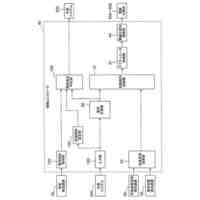
本実施形態におけるシステム構成を示すブロック図である。
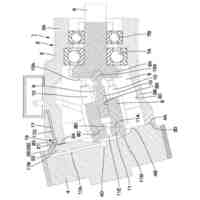
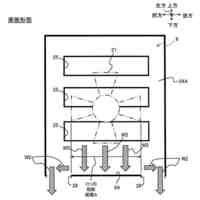
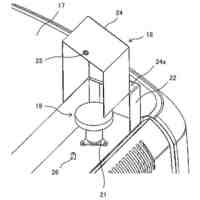
各受信アンテナの配置と、それらの受信範囲を説明する図である。
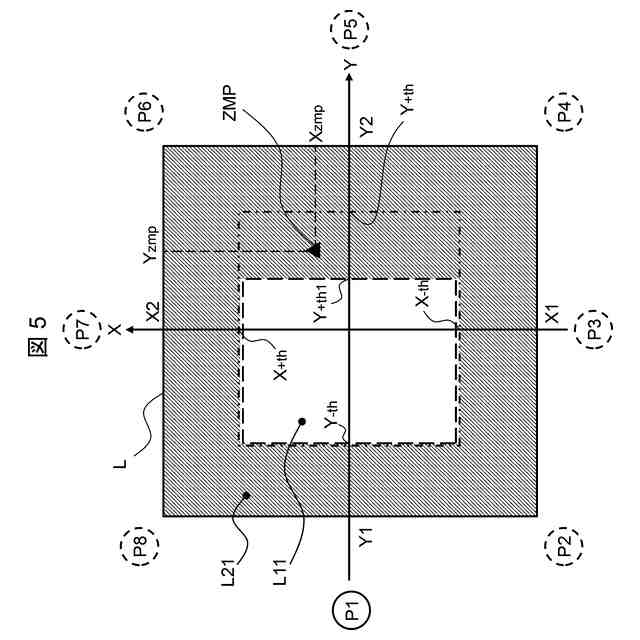
高安定範囲を説明する図である。
補正後高安定範囲の一例を示す図である。
補正後高安定範囲の他の例を示す図である。
変形例における補正後高安定範囲の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明を実施するための形態について説明する。以下の記載および図面は、本発明を説明するための例示であって、説明の明確化のため、適宜、省略および簡略化がなされている。また、以下の説明では、同一または類似の要素および処理には同一の符号を付し、重複説明を省略する場合がある。なお、以下に記載する内容はあくまでも本発明の実施の形態の一例を示すものであって、本発明は下記の実施の形態に限定されるものではなく、他の種々の形態でも実施する事が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
19日前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
変速装置
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ