TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151065
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052296
出願日
2024-03-27
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/24 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】崖状の地形が作業機械の姿勢安定性に及ぼす影響を考慮して作業機械の姿勢安定性を確保することを目的とする。
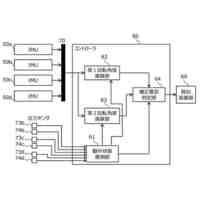
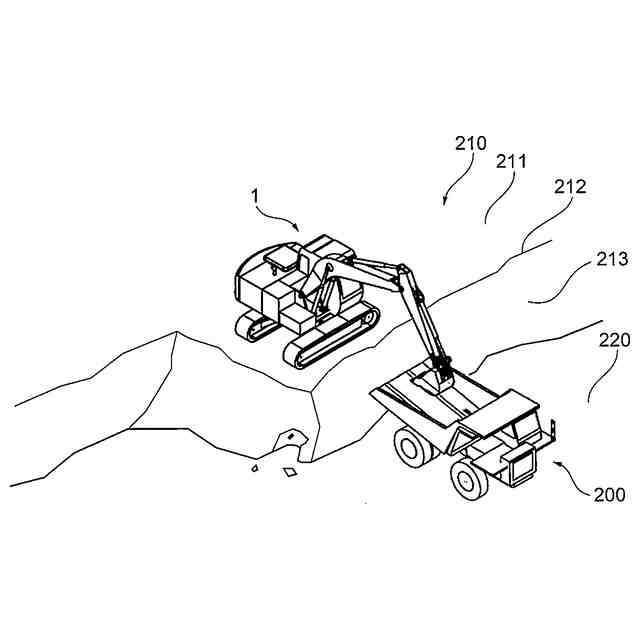
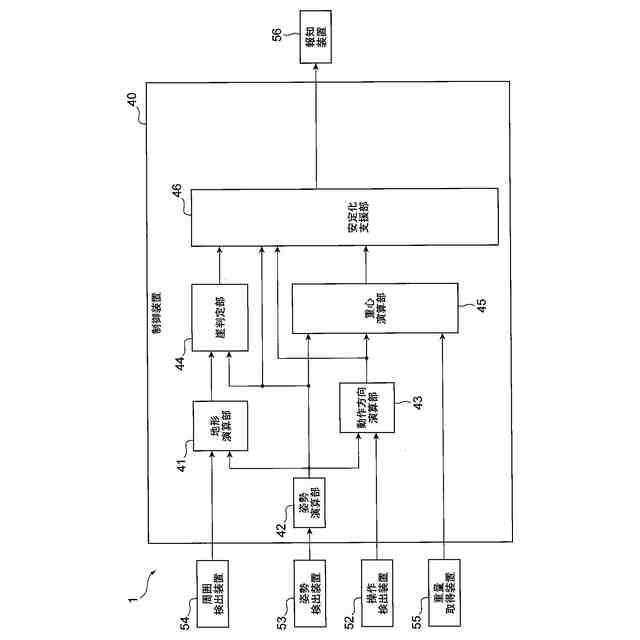
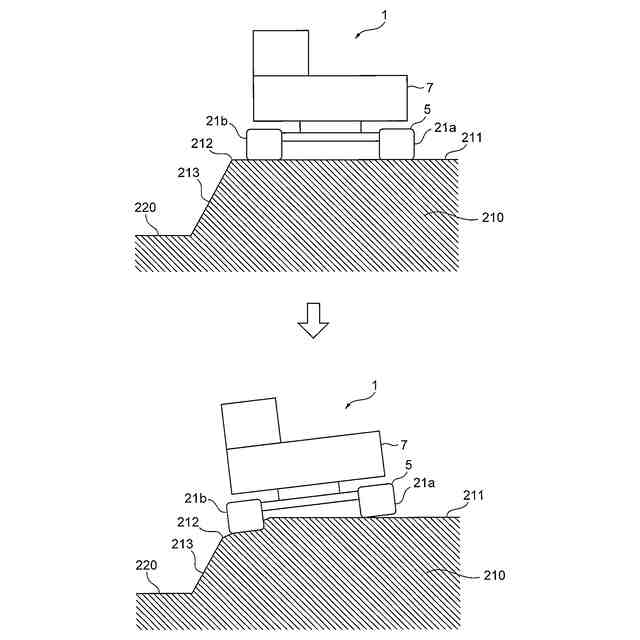
【解決手段】作業機械1は、作業機械1の傾斜角度及び上部旋回体7の旋回角度を検出する姿勢検出装置53と、周囲の地形を検出する周囲検出装置54と、作業機械1を制御する制御装置40と、を備える。制御装置40は、周囲検出装置54の検出結果に基づいて、作業機械1の周囲にベンチ縁212が存在するか否かを判定する崖判定部44と、姿勢検出装置53の検出結果に基づいて作業機械1の重心位置を演算する重心演算部45と、作業機械1の姿勢安定化を支援する安定化支援部46と、を有する。安定化支援部46は、ベンチ縁212と重心位置との距離が閾値以下である場合、姿勢安定化の支援として、報知装置56に警報を報知させる、又は、重心位置がベンチ縁212に接近するオペレータの操作を制限する。
【選択図】図4
特許請求の範囲
【請求項1】
下部走行体と、前記下部走行体に対して旋回可能に設けられた上部旋回体と、を備える作業機械であって、
前記作業機械の傾斜角度及び前記上部旋回体の旋回角度を検出する姿勢検出装置と、
前記作業機械の周囲の地形を検出する周囲検出装置と、
前記作業機械を制御する制御装置と、を備え、
前記制御装置は、
前記周囲検出装置の検出結果に基づいて、前記作業機械の周囲に崖縁が存在するか否かを判定する崖判定部と、
前記姿勢検出装置の検出結果に基づいて前記作業機械の重心位置を演算する重心演算部と、
前記作業機械の姿勢安定化を支援する安定化支援部と、を有し、
前記安定化支援部は、前記崖判定部によって判定された前記崖縁と前記重心演算部によって演算された前記重心位置との距離が、予め設定された閾値以下である場合、前記姿勢安定化の支援として、前記作業機械の報知装置に警報を報知させる、又は、前記重心位置が前記崖縁に接近するオペレータの操作を制限する
ことを特徴とする作業機械。
続きを表示(約 1,700 文字)
【請求項2】
前記安定化支援部は、
前記姿勢検出装置によって検出された前記傾斜角度と、前記重心演算部によって演算された前記重心位置とに基づいて、前記崖縁と前記重心位置との前記距離が変動するよう前記作業機械が傾斜した状態か否かを判定し、
前記作業機械が傾斜した状態であって、前記崖縁と前記重心位置との前記距離が第1閾値以下である場合、前記姿勢安定化を支援する
ことを特徴とする請求項1に記載の作業機械。
【請求項3】
前記上部旋回体に対して回動可能に取り付けられ、ブーム、アーム及びバケットを有する多関節型の作業装置と、
前記バケットに保持された掘削物の重量を取得する重量取得装置と、
前記作業装置及び前記上部旋回体に対する各操作情報を検出する操作検出装置と、を更に備え、
前記姿勢検出装置は、前記作業装置の各関節の回動角度を更に検出し、
前記重心演算部は、前記操作検出装置によって検出された前記操作情報と、前記姿勢検出装置によって検出された前記傾斜角度、前記旋回角度及び前記回動角度と、前記重量取得装置によって取得された前記重量とに基づいて、前記操作情報に応じた前記重心位置の移動方向を予測し、
前記安定化支援部は、
前記重心演算部によって予測された前記移動方向に基づいて前記崖縁と前記重心位置との前記距離を予測し、
予測された前記崖縁と前記重心位置との前記距離が第2閾値以下である場合、前記姿勢安定化を支援する
ことを特徴とする請求項1に記載の作業機械。
【請求項4】
前記操作検出装置は、前記上部旋回体に対する旋回操作の前記操作情報を検出し、
前記重心演算部は、前記旋回操作の前記操作情報に応じて前記上部旋回体が旋回動作を行う場合の前記移動方向を予測し、
前記安定化支援部は、前記重心演算部によって予測された前記移動方向に基づいて、前記旋回動作が行われた場合における前記崖縁と前記重心位置との前記距離を予測する
ことを特徴とする請求項3に記載の作業機械。
【請求項5】
前記下部走行体は、クローラを有し、
前記安定化支援部は、前記クローラの進行方向に存在する前記崖縁と前記重心位置との前記距離を判定する前記閾値と、前記クローラの左右方向に存在する前記崖縁と前記重心位置との前記距離を判定する前記閾値と、を異なる値として設定する
ことを特徴とする請求項1に記載の作業機械。
【請求項6】
前記作業機械の周囲の土質情報を取得する土質取得装置を更に備え、
前記安定化支援部は、前記土質取得装置によって取得された前記土質情報に応じて前記閾値を変更する
ことを特徴とする請求項1に記載の作業機械。
【請求項7】
前記安定化支援部は、前記警報として、前記重心位置が前記崖縁に接近する前記操作の内容を通知する警報、及び、前記重心位置が前記崖縁に接近する前記操作が行われたことを警告する警報の少なくとも1つを、前記報知装置に報知させる
ことを特徴とする請求項1に記載の作業機械。
【請求項8】
前記安定化支援部は、前記重心位置が前記崖縁に接近する前記操作の制限として、当該操作の操作量に上限値を設定する
ことを特徴とする請求項1に記載の作業機械。
【請求項9】
前記安定化支援部は、前記重心位置が前記崖縁に接近する前記操作が制限されていることを通知する警報を、前記報知装置に報知させる
ことを特徴とする請求項8に記載の作業機械。
【請求項10】
遠隔操作装置と無線通信を行う通信装置を更に備え、
前記通信装置は、前記遠隔操作装置から送信された操作情報を受信して前記制御装置に出力し、
前記制御装置は、前記遠隔操作装置から送信された前記操作情報に応じて前記作業機械を制御する
ことを特徴とする請求項1に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
下部走行体に対して旋回可能に取り付けられた上部旋回体と、上部旋回体に対して回動可能に取り付けられた多関節型の作業装置と、を備えた作業機械が知られている。作業装置は、上部旋回体に対して回動可能に取り付けられたブームと、ブームに対して回動可能に取り付けられたアームと、アームに対して回動可能に取り付けられたバケットと、を有する。
【0003】
特許文献1には、バケットを用いて持ち上げる土砂の体積を推定し、推定された土砂の体積と、上部旋回体、ブーム、アーム及びバケットの各姿勢とに基づいて、作業機械の姿勢安定性を評価する技術が記載されている。また、特許文献1には、地形に関する情報を取得してバケットが持ち上げる土砂の体積を推定することも言及されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-154674号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業機械の姿勢安定性は、作業機械の周囲の地形の影響を受ける。例えば、作業機械の周囲に崖状の地形があり、崖下方向に作業機械が傾斜した際には、作業機械の姿勢安定性は低下し易い。特許文献1には、地形からバケット内の土砂の体積を推定し、姿勢安定性を評価することについては記載があるが、崖状の地形が姿勢安定性に及ぼす影響については言及されていない。
【0006】
本発明は、上記に鑑みてなされたものであり、崖状の地形が作業機械の姿勢安定性に及ぼす影響を考慮して作業機械の姿勢安定性を確保することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の作業機械は、下部走行体と、前記下部走行体に対して旋回可能に設けられた上部旋回体と、を備える作業機械であって、前記作業機械の傾斜角度及び前記上部旋回体の旋回角度を検出する姿勢検出装置と、前記作業機械の周囲の地形を検出する周囲検出装置と、前記作業機械を制御する制御装置と、を備え、前記制御装置は、前記周囲検出装置の検出結果に基づいて、前記作業機械の周囲に崖縁が存在するか否かを判定する崖判定部と、前記姿勢検出装置の検出結果に基づいて前記作業機械の重心位置を演算する重心演算部と、前記作業機械の姿勢安定化を支援する安定化支援部と、を有し、前記安定化支援部は、前記崖判定部によって判定された前記崖縁と前記重心演算部によって演算された前記重心位置との距離が、予め設定された閾値以下である場合、前記姿勢安定化の支援として、前記作業機械の報知装置に警報を報知させる、又は、前記重心位置が前記崖縁に接近するオペレータの操作を制限することを特徴とする。
【発明の効果】
【0008】
本発明によれば、崖状の地形が作業機械の姿勢安定性に及ぼす影響を考慮して作業機械の姿勢安定性を確保することができる。
上記以外の課題、構成要素及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
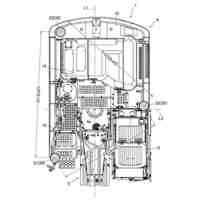
作業機械の側面図。
作業機械が作業現場で作業する様子を説明する図。
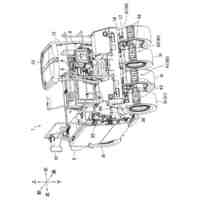
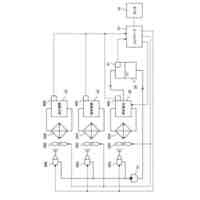
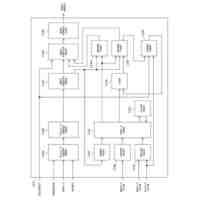
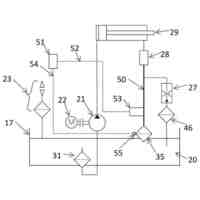
作業機械に搭載された油圧システムの構成を説明する図。
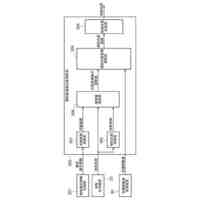
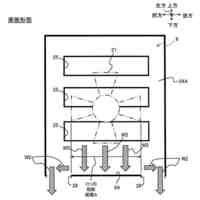
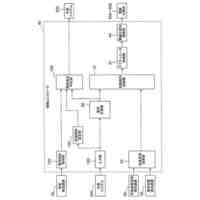
第1実施形態の制御装置の機能的構成を説明するブロック図。
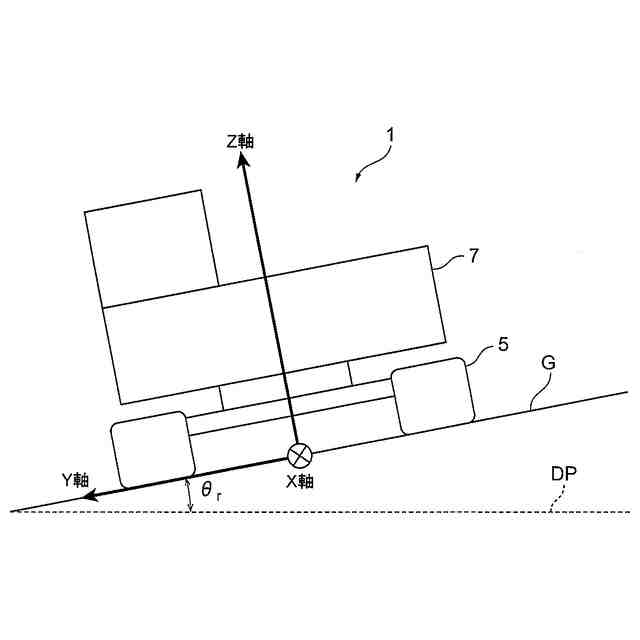
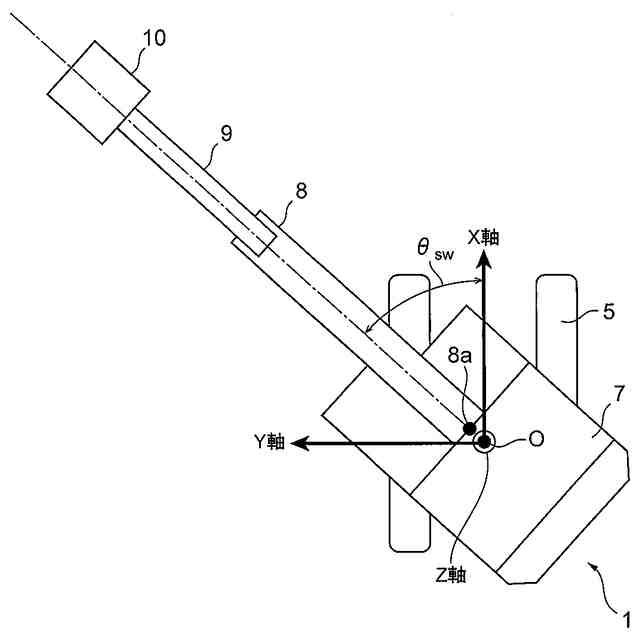
図4に示す制御装置において設定される基準座標系を示す図。
図5に示す基準座標系を他の方向から視た図。
図5に示す基準座標系を他の方向から視た図。
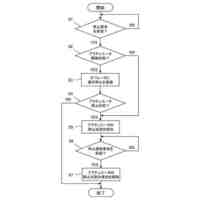
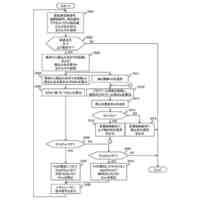
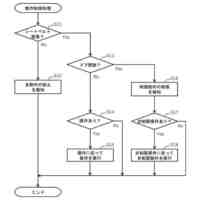
図4に示す制御装置によって行われる姿勢安定化の支援に係る処理を示すフローチャート。
作業機械がロール方向に傾斜した様子を説明する作業機械の背面図。
作業機械がピッチ方向に傾斜した様子を説明する作業機械の側面図。
重心位置がフロント作業装置側に位置する場合の旋回動作時の様子を説明する作業機械の上面図。
図4に示す報知装置によって報知される警報の一例を示す図。
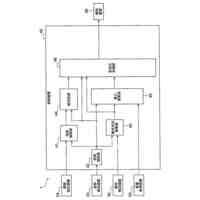
第2実施形態の制御装置の機能的構成を説明するブロック図。
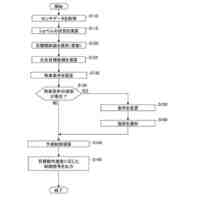
図13に示す制御装置によって行われる姿勢安定化の支援に係る処理を示すフローチャート。
図13に示す報知装置によって報知される警報の一例を示す図。
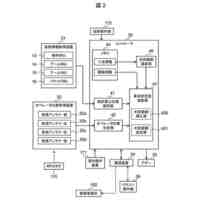
第3実施形態の制御装置の機能的構成を説明するブロック図。
図16に示す安定化支援部によって変更される閾値と土質情報との関係を示す図。
第4実施形態の作業機械を操作する遠隔操作装置を説明する図。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を用いて説明する。なお、各実施形態において同一の符号を付された構成要素については、特に言及しない限り、各実施形態において同様の構成要素を有し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ