TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155097
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024058482
出願日
2024-04-01
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
3/43 20060101AFI20251006BHJP(水工;基礎;土砂の移送)
要約
【課題】走行性能及び作業性能が変化した場合であっても、ライズラン距離を一定に保つことが可能な作業車両を提供する。
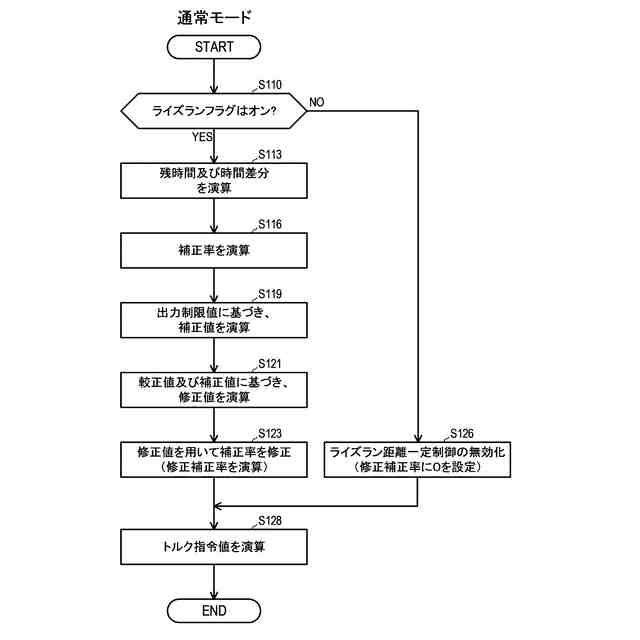
【解決手段】作業車両の制御装置は、車速及びアーム角に基づいて走行駆動力及び作業駆動力を調整するための走行補正率及び作業補正率を設定する。制御装置は、車速及びアーム角に基づいてライズラン距離を演算し、ライズラン距離を目標走行距離で割った値である距離比率を演算し、距離比率が大きいほど、走行駆動力の抑制量を増加させる較正値及び作業駆動力の抑制量を減少させる較正値を設定する。制御装置は、動力源の出力制限値が減少するほど、走行駆動力の抑制量を減少/増加させる補正値及び作業駆動力の抑制量を増加/減少させる補正値を設定する。制御装置は、較正値及び補正値に基づいて、走行補正率及び作業補正率を修正する。
【選択図】図11
特許請求の範囲
【請求項1】
車体に取り付けられた車輪と、
前記車輪に走行駆動力を供給する走行駆動力供給装置と、
前記車体に上下方向に回動可能に取り付けられたアームを有する作業装置と、
前記作業装置に作業駆動力を供給する作業駆動力供給装置と、
車速を検出する車速センサと、
前記車体に対する前記アームの角度であるアーム角を検出するアーム相対角センサと、
前記走行駆動力供給装置及び前記作業駆動力供給装置に動力を供給する動力源と、
前記動力源の出力が出力制限値を超えないように、前記走行駆動力供給装置及び前記作業駆動力供給装置の少なくとも一方を制御する制御装置と、を備え、
前記制御装置は、
前記車速センサで検出した前記車速と、前記アーム相対角センサで検出した前記アーム角と、予め定められた目標走行距離と、予め定められた目標アーム角とに基づいて、前記走行駆動力を調整するための走行補正率及び前記作業駆動力を調整するための作業補正率の少なくとも一方を設定し、
前記走行補正率が設定された場合、前記走行補正率に基づいて、前記走行駆動力供給装置の前記走行駆動力を制御し、
前記作業補正率が設定された場合、前記作業補正率に基づいて、前記作業駆動力供給装置の前記作業駆動力を制御する作業車両において、
前記制御装置は、
前記車速センサで検出した前記車速と、前記アーム相対角センサで検出した前記アーム角と、に基づいて、前記アームが上昇し始めてから前記目標アーム角に達するまでの走行距離であるライズラン距離を演算し、
演算された前記ライズラン距離を前記目標走行距離で割った値である距離比率を演算し、
前記距離比率が大きいほど、走行駆動力の抑制量を増加させる較正値及び作業駆動力の抑制量を減少させる較正値の少なくとも一方を設定し、
前記動力源の出力制限値が減少したときの前記走行駆動力の抑制量が前記作業駆動力の抑制量よりも大きくなる前記作業車両においては、前記動力源の出力制限値が減少するほど、走行駆動力の抑制量を減少させる補正値及び作業駆動力の抑制量を増加させる補正値の少なくとも一方を設定し、
前記動力源の出力制限値が減少したときの前記走行駆動力の抑制量が前記作業駆動力の抑制量よりも小さくなる前記作業車両においては、前記動力源の出力制限値が減少するほど、走行駆動力の抑制量を増加させる補正値及び作業駆動力の抑制量を減少させる補正値の少なくとも一方を設定し、
設定された前記較正値及び設定された前記補正値に基づいて、前記走行補正率及び前記作業補正率の少なくとも一方を修正する、
ことを特徴とする作業車両。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の作業車両において、
前記制御装置は、
前記距離比率が予め定められた基準距離比率よりも大きい場合には、前記較正値により前記走行補正率及び前記作業補正率の修正を行わない場合に比べて、走行駆動力の抑制量を増加させる較正値及び作業駆動力の抑制量を減少させる較正値の少なくとも一方を設定し、
前記距離比率が前記基準距離比率よりも小さい場合には、前記較正値により前記走行補正率及び前記作業補正率の修正を行わない場合に比べて、走行駆動力の抑制量を減少させる較正値及び作業駆動力の抑制量を増加させる較正値の少なくとも一方を設定する、
ことを特徴とする作業車両。
【請求項3】
請求項1に記載の作業車両において、
前記制御装置は、
前記車速及び前記目標走行距離に基づいて、前記車体が前記目標走行距離に到達するまでの残時間を走行残時間として演算し、
前記アーム角及び前記目標アーム角に基づいて、前記アームが前記目標アーム角に到達するまでの残時間を作業残時間として演算し、
前記走行残時間と前記作業残時間との時間差分に基づいて前記走行補正率及び前記作業補正率を設定し、
前記時間差分の大きさに応じた前記較正値を設定する、
ことを特徴とする作業車両。
【請求項4】
請求項1に記載の作業車両において、
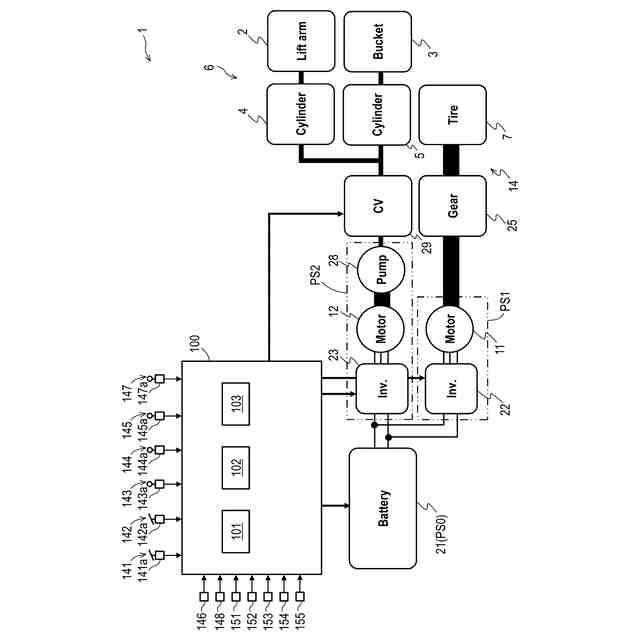
前記動力源は、バッテリであり、
前記走行駆動力供給装置は、前記バッテリの電力によって駆動される走行用モータと、前記走行用モータを制御する走行用インバータと、を有し、
前記作業駆動力供給装置は、前記バッテリの電力によって駆動される作業用モータと、前記作業用モータを制御する作業用インバータと、を有している、
ことを特徴とする作業車両。
【請求項5】
請求項4に記載の作業車両において、
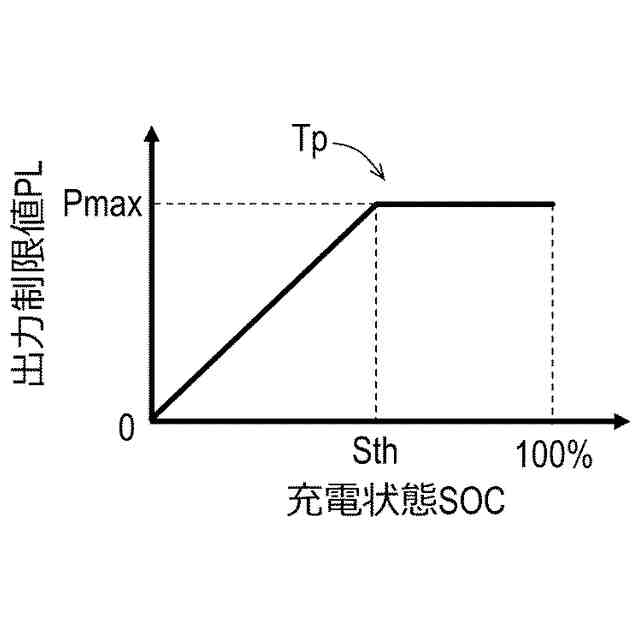
前記制御装置は、前記バッテリの充電状態に応じて前記補正値を設定する、
ことを特徴とする作業車両。
【請求項6】
請求項1に記載の作業車両において、
前記動力源は、エンジンであり、
前記作業駆動力供給装置は、前記エンジンによって駆動される油圧ポンプを有している、
ことを特徴とする作業車両。
【請求項7】
請求項6に記載の作業車両において、
前記制御装置は、前記エンジンの温度に応じて前記補正値を設定する、
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
作業車両としては、例えば、車体を走行させるための走行装置と、掘削作業を行うための作業装置とを備えたホイールローダが知られている。作業装置は、車体に回動可能に取り付けられたアームと、アームに回動可能に取り付けられたバケットとを有する。作業車両は、バケットに入れた土砂等をダンプトラック等の積込対象に積載する際に、車体を積込対象に向かって前進させながらアームを上昇させるライズランと呼ばれる動作を行う。ライズランでは、アーム操作レバー、アクセルペダル、及びブレーキペダルの操作が必要になる。また、ライズランでは、積込対象の直前まで速く前進しつつ、積込対象の直前でアームが必要な高さまで上がりきるように操作することで、運搬作業の効率とエネルギー効率(燃費、電費)の両方が良くなる。このため、複数の操作部材に対して、状況に応じた精密な操作がオペレータに要求されており、オペレータの負担が大きいという課題があった。
【0003】
このような課題を解決するために、センサの検出結果に基づき演算された車速、走行距離、及びアームの角度、並びに、予め設定された目標走行距離及び目標アーム角に基づいて、走行駆動力を調整するための走行補正率と作業駆動力を調整するための作業補正率とを設定し、設定した走行補正率と作業補正率とに基づいて、走行駆動力と作業駆動力とを制御する制御装置を備えた作業車両が提案されている(特許文献1参照)。
【0004】
特許文献1に記載の制御装置は、車速及び走行距離と、目標走行距離とに基づいて、目標走行距離に到達するまでの残時間を走行残時間として計算し、アームの角度と、目標アーム角とに基づいて、目標アーム角に到達するまでの残時間を作業残時間として計算する。特許文献1に記載の制御装置は、走行残時間よりも作業残時間が短いほど、アームの上昇速度を制限するように作業補正率を大きく設定し、走行残時間よりも作業残時間が長いほど、車速を制限するように走行補正率を大きく設定する。これにより、ライズランを開始してから終了するまでの走行距離であるライズラン距離を一定に制御することができる。
【先行技術文献】
【特許文献】
【0005】
特開2022-148075号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の制御方法では、所定の車格の車両の走行性能及び作業性能に合わせて制御パラメータ(走行補正率及び作業補正率)の特性が定められる。このため、車格が異なる車両に、上記制御パラメータの特性をそのまま用いることはできない。例えば、新製品を開発した場合には、その製品の走行性能及び作業性能に合わせて制御パラメータの特性を新たに定める必要がある。また、車両の構成部品(例えば、動力源、モータ、油圧ポンプ)を仕様の異なる新たな構成部品に交換する場合には、車格が変更となるため、制御パラメータの特性を新たに定める必要がある。
【0007】
また、同じ車格であっても、動力源の出力を制限する場合には、動力源の出力を制限していない通常時に対して、走行性能及び作業性能が変化し得る。このため、動力源の出力が制限された場合に、ライズラン距離が予め設定された目標ライズラン距離よりも長くなってしまったり、短くなってしまったりするおそれがある。
【0008】
本発明は、走行性能及び作業性能が変化した場合であっても、ライズラン距離を一定に保つことが可能な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
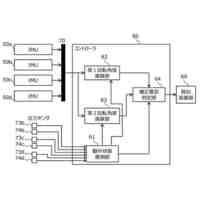
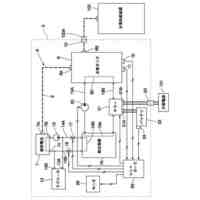
本発明の一態様による作業車両は、車体に取り付けられた車輪と、前記車輪に走行駆動力を供給する走行駆動力供給装置と、前記車体に上下方向に回動可能に取り付けられたアームを有する作業装置と、前記作業装置に作業駆動力を供給する作業駆動力供給装置と、車速を検出する車速センサと、前記車体に対する前記アームの角度であるアーム角を検出するアーム相対角センサと、前記走行駆動力供給装置及び前記作業駆動力供給装置に動力を供給する動力源と、前記動力源の出力が出力制限値を超えないように、前記走行駆動力供給装置及び前記作業駆動力供給装置の少なくとも一方を制御する制御装置と、を備える。前記制御装置は、前記車速センサで検出した前記車速と、前記アーム相対角センサで検出した前記アーム角と、予め定められた目標走行距離と、予め定められた目標アーム角とに基づいて、前記走行駆動力を調整するための走行補正率及び前記作業駆動力を調整するための作業補正率の少なくとも一方を設定する。前記制御装置は、前記走行補正率が設定された場合、前記走行補正率に基づいて、前記走行駆動力供給装置の前記走行駆動力を制御し、前記作業補正率が設定された場合、前記作業補正率に基づいて、前記作業駆動力供給装置の前記作業駆動力を制御する。前記制御装置は、前記車速センサで検出した前記車速と、前記アーム相対角センサで検出した前記アーム角と、に基づいて、前記アームが上昇し始めてから前記目標アーム角に達するまでの走行距離であるライズラン距離を演算し、演算された前記ライズラン距離を前記目標走行距離で割った値である距離比率を演算し、前記距離比率が大きいほど、走行駆動力の抑制量を増加させる較正値及び作業駆動力の抑制量を減少させる較正値の少なくとも一方を設定する。前記制御装置は、前記動力源の出力制限値が減少したときの前記走行駆動力の抑制量が前記作業駆動力の抑制量よりも大きくなる前記作業車両においては、前記動力源の出力制限値が減少するほど、走行駆動力の抑制量を減少させる補正値及び作業駆動力の抑制量を増加させる補正値の少なくとも一方を設定する。前記制御装置は、前記動力源の出力制限値が減少したときの前記走行駆動力の抑制量が前記作業駆動力の抑制量よりも小さくなる前記作業車両においては、前記動力源の出力制限値が減少するほど、走行駆動力の抑制量を増加させる補正値及び作業駆動力の抑制量を減少させる補正値の少なくとも一方を設定する。前記制御装置は、設定された前記較正値及び設定された前記補正値に基づいて、前記走行補正率及び前記作業補正率の少なくとも一方を修正する。
【発明の効果】
【0010】
本発明によれば、走行性能及び作業性能が変化した場合であっても、ライズラン距離を一定に保つことが可能な作業車両を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
22日前
日立建機株式会社
建設機械
22日前
日立建機株式会社
建設機械
2か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
変速装置
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ