TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152859
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055019
出願日
2024-03-28
発明の名称
遠隔制御システム
出願人
日立建機株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
H04N
7/18 20060101AFI20251002BHJP(電気通信技術)
要約
【課題】
遠隔操作される作業機械の前方視界の映像に遅延が生じている状況においても、操作者が作業機械の旋回操作の量を直感的に認識できるようにすること。
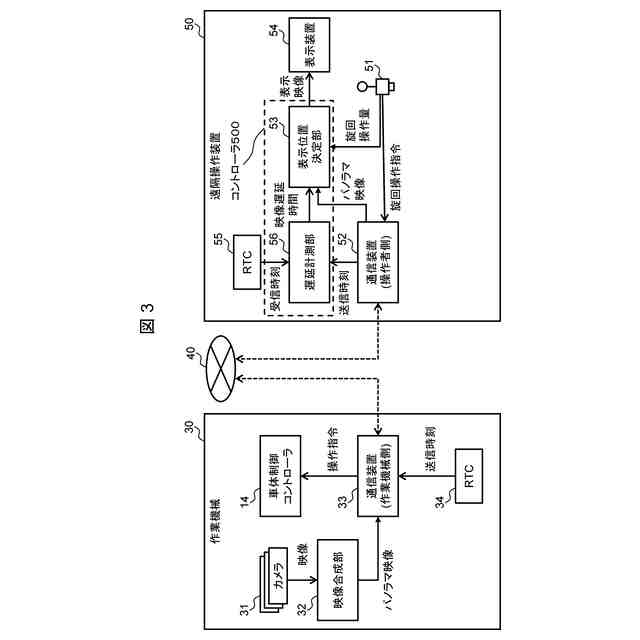
【解決手段】
遠隔制御システムは、第1の計時装置によって取得された時刻を送信時刻として付加された信号から取得した送信時刻と受信時刻との差に応じて旋回体の旋回角度の遅延量を算出する遅延量算出部と、遅延量算出部により算出した遅延量に基づき、通信装置により受信した信号のうち広角に撮影された映像の一部を利用して当該映像を補正して、補正後の映像を表示部に表示させる表示制御部と、を有する。
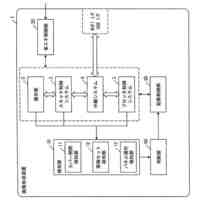
【選択図】 図3
特許請求の範囲
【請求項1】
撮影装置が設けられた旋回体を旋回可能に設けた作業機械と、
前記作業機械を遠隔操作するための遠隔操作信号を出力する遠隔操作装置と、を備えた遠隔制御システムにおいて、
前記作業機械は、
第1の計時装置と、
前記撮影装置によって撮影された映像信号に、前記第1の計時装置によって取得された時刻を送信時刻として付加された信号として前記遠隔操作装置に送信する送信装置と、を有し、
前記遠隔操作装置は、
前記作業機械を遠隔操作する操作装置と、
前記操作装置の操作に応じて前記遠隔操作信号を前記作業機械に対して送信する一方、前記作業機械から前記信号を受信する通信装置と、
第2の計時装置と、
前記通信装置により受信した前記信号に基づいて映像を表示する表示装置と、
前記撮影装置により撮影された映像を前記表示装置に表示させる制御装置と、を有し、
前記制御装置は、
前記第2の計時装置によって取得された時刻に基づいて前記送信時刻が付与された信号の受信時刻を特定し、前記送信時刻が付与された信号から取得した前記送信時刻と前記受信時刻との差に応じて前記旋回体の旋回角度の遅延量を算出する遅延量算出部と、
前記遅延量算出部により算出した前記遅延量に基づき、前記通信装置により受信した前記信号のうち広角に撮影された映像の一部を利用して前記映像を補正して、補正後の前記映像を前記表示装置に表示させる表示制御部と、
を有することを特徴とする遠隔制御システム。
続きを表示(約 730 文字)
【請求項2】
前記表示制御部は、
前記信号に基づく前記映像を、前記遅延量分に相当する映像の領域であって、前記操作装置により操作された前記旋回体の旋回方向における領域を利用し前記遅延量分を補うように補正する
ことを特徴とする請求項1に記載の遠隔制御システム。
【請求項3】
前記作業機械は、
走行可能な走行体を備え、
前記走行体上には、前記走行体に対して旋回動作が可能な前記旋回体を備えている
ことを特徴とする請求項1に記載の遠隔制御システム。
【請求項4】
前記表示制御部は、
前記操作装置により操作された前記旋回体の旋回方向と、前記映像の映像遅延時間をもとに、前記補正後の映像における表示される旋回体の方向を決定する
ことを特徴とする請求項1に記載の遠隔制御システム。
【請求項5】
複数の前記撮影装置を備え、
前記作業機械は、
複数の前記撮影装置によって撮影された複数の前記映像を合成して1つの映像を生成する映像生成部を有する
ことを特徴とする請求項1に記載の遠隔制御システム。
【請求項6】
前記表示制御部は、
前記旋回体の推定旋回角度と前記映像中の旋回角度との差を対象領域とする
ことを特徴とする請求項2に記載の遠隔制御システム。
【請求項7】
前記表示制御部は、
前記映像について映像品質の低下が発生した場合または前記映像の映像信号が一時的に途絶した場合、その直前の前記映像を前記表示装置に表示させ続ける
ことを特徴とする請求項1に記載の遠隔制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔制御システムに関し、例えば、無人の作業機械を遠隔操作する技術に関する遠隔制御システムに適用して好適なものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
地震や洪水、土砂崩れ等による災害復旧工事において、人が搭乗した作業機械による作業は二次的な人的被害のおそれがあるため、コックピットから遠隔操作される無人の作業機械によって作業が行われる場合がある。また、車体の振動にさらされることによる疲れを回避したり、一人で多数の作業機械を操作できるようにするなどの目的で遠隔作業が行われる場合もある。
【0003】
多くの場合、作業機械の運転室や作業機械の周囲にカメラが設置されており、このカメラによって撮影された映像が遠隔コックピットのモニタに表示される。操作者はその映像を頼りに作業を行うので、作業機械やその周囲の状況をモニタに表示される映像によって的確に認識できるようにする必要がある。例えば、特許文献1には、魚眼レンズを用いて映像(以下「魚眼映像」と称する)を撮影可能な撮像装置を作業機械に搭載し、遠隔地にいる操作者が装着したヘッドマウントディスプレイに魚眼映像の映像信号を送信して魚眼映像を投影する遠隔制御システムが提案されている。この遠隔制御システムは、ヘッドマウントディスプレイに搭載された角度センサによって操作者の頭の向きを検知し、それに応じて所望方向の映像を切り出して投影する。これにより、実際の作業機械の運転室からの視界を再現した映像を操作者に提供することができる。
【先行技術文献】
【特許文献】
【0004】
特開2018-121195号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、映像信号はデータ量が大きいため、例えばインターネットのような公衆回線を経由して通信する場合、通信状況によっては操作者に届くまで数百ミリ秒~数秒の遅れが発生するおそれがある。そのため、操作者が遠隔操作を開始してから実際に作業機械が動作して映像に反映されるまでに時間がかかることがあった。また、同様に、操作者が遠隔操作を停止してから実際に作業機械が停止して映像に反映されるまでにも時間がかかる。このため、操作者はそのような映像の遅れを予想しながら遠隔操作を行う必要があり、作業機械の旋回操作の量を直感的に認識しつつ効率よく作業することは難しかった。
【0006】
本発明は以上の点を考慮してなされたもので、遠隔操作される作業機械の前方視界の映像に遅延が生じている状況においても、操作者が作業機械の旋回操作の量を直感的に認識することができる遠隔制御システムを提案することを目的とする。
【課題を解決するための手段】
【0007】
かかる課題を解決するため本発明においては、撮影装置が設けられた旋回体を旋回可能に設けた作業機械と、前記作業機械を遠隔操作するための遠隔操作信号を出力する遠隔操作装置と、を備えた遠隔制御システムにおいて、前記作業機械は、第1の計時装置と、前記撮影装置によって撮影された映像信号に、前記第1の計時装置によって取得された時刻を送信時刻として付加された信号として前記遠隔操作装置に送信する送信装置と、を有し、前記遠隔操作装置は、前記作業機械を遠隔操作する操作装置と、前記操作装置の操作に応じて前記遠隔操作信号を前記作業機械に対して送信する一方、前記作業機械から前記信号を受信する通信装置と、第2の計時装置と、前記通信装置により受信した前記信号に基づいて映像を表示する表示装置と、前記撮影装置により撮影された映像を前記表示装置に表示させる制御装置と、を有し、前記制御装置は、前記第2の計時装置によって取得された時刻に基づいて前記送信時刻が付与された信号の受信時刻を特定し、前記送信時刻が付与された信号から取得した前記送信時刻と前記受信時刻との差に応じて前記旋回体の旋回角度の遅延量を算出する遅延量算出部と、前記遅延量算出部により算出した前記遅延量に基づき、前記通信装置により受信した前記信号のうち広角に撮影された映像の一部を利用して前記映像を補正して、補正後の前記映像を前記表示装置に表示させる表示制御部と、を有するようにした。
【発明の効果】
【0008】
本発明によれば、遠隔操作される作業機械の前方視界の映像に遅延が生じている状況においても、操作者が作業機械の旋回操作の量を直感的に認識することができる。
【図面の簡単な説明】
【0009】
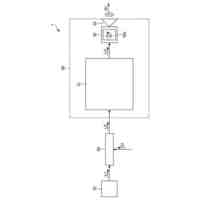
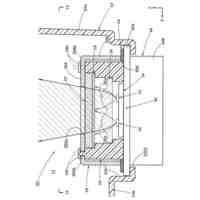
本実施形態による遠隔制御システムを構成する油圧ショベルの外観の一例を示す斜視図である。
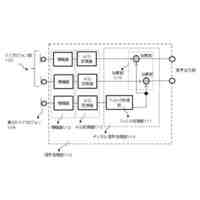
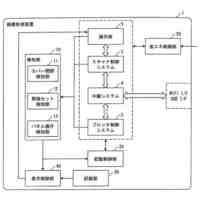
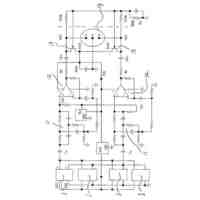
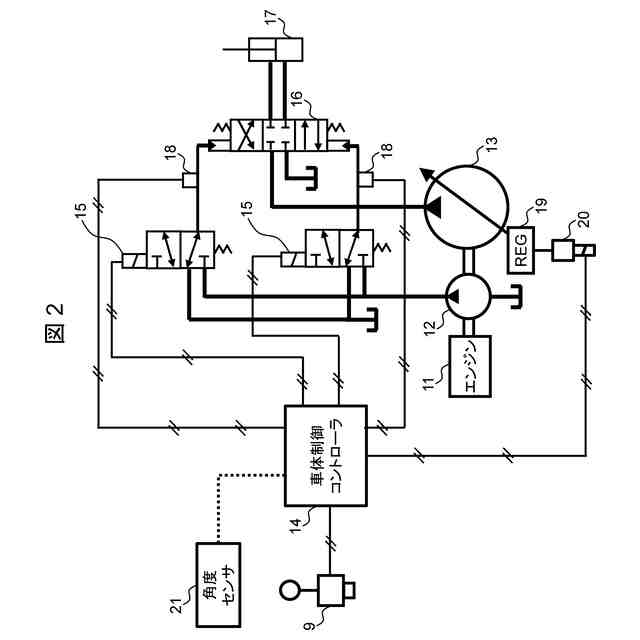
図1に示す油圧ショベルのシステム構成例を示すブロック図である。
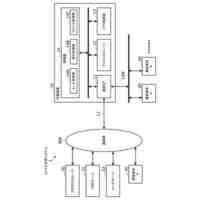
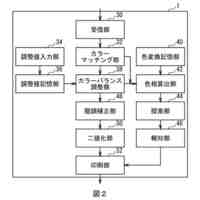
本実施形態による遠隔制御システムのシステム構成の一例を示すブロック図である。
前方視界の映像の表示方向を補正する様子の一例を示す図である。
映像遅延時間分切り抜くべき対象領域の第一の決定方法の一例を示す図である。
映像遅延時間分切り抜くべき対象領域の第二の決定方法の一例を示す図である。
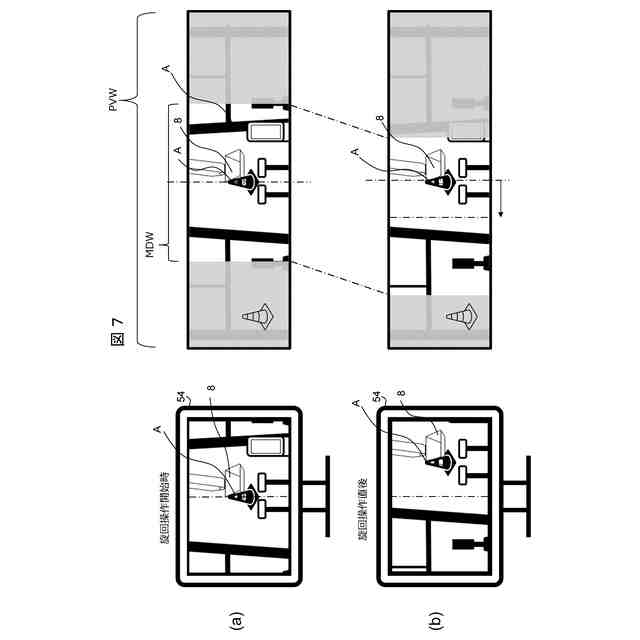
旋回操作開始時から旋回操作後までのパノラマ映像および表示装置に表示される表示態様を示す図である。
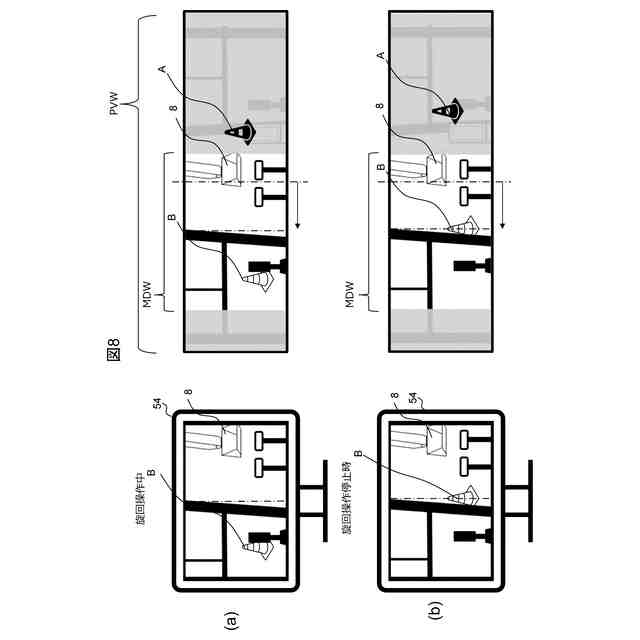
旋回操作中から旋回操作停止までのパノラマ映像および表示装置に表示される表示態様を示す図である。
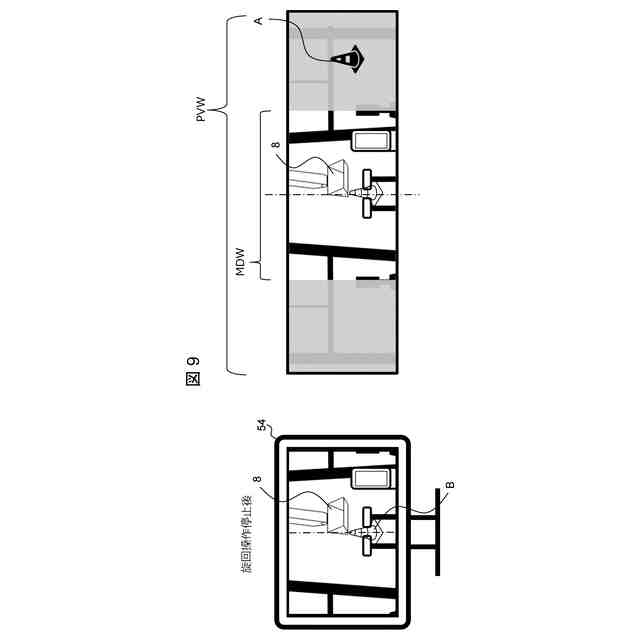
旋回停止後のパノラマ映像および表示装置に表示される表示態様を示す図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて、本発明の一実施形態を詳細に説明する。
本実施形態による遠隔制御システムは、前方視界の映像を撮影する撮影装置が設けられた旋回体を水平方向に旋回させる作業機械の一例としての油圧ショベルと、当該油圧ショベルを遠隔操作するための遠隔操作信号を出力する遠隔操作装置と、を備える。まず、油圧ショベルの構成例について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーピース
12日前
個人
イヤーマフ
26日前
個人
監視カメラシステム
1か月前
キーコム株式会社
光伝送線路
1か月前
個人
スイッチシステム
20日前
個人
スキャン式車載用撮像装置
1か月前
WHISMR合同会社
収音装置
2か月前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
2か月前
個人
ワイヤレスイヤホン対応耳掛け
2か月前
ヤマハ株式会社
放音制御装置
20日前
サクサ株式会社
無線システム
1か月前
キヤノン電子株式会社
画像読取装置
2か月前
キヤノン電子株式会社
画像読取装置
12日前
サクサ株式会社
無線通信装置
1か月前
キヤノン電子株式会社
画像読取装置
20日前
個人
映像表示装置、及びARグラス
21日前
サクサ株式会社
無線通信装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
株式会社リコー
画像形成装置
28日前
株式会社リコー
画像形成装置
2か月前
株式会社リコー
画像形成装置
2か月前
キヤノン電子株式会社
シート搬送装置
12日前
キヤノン株式会社
撮像システム
2か月前
ブラザー工業株式会社
読取装置
3か月前
個人
発信機及び発信方法
1か月前
日本電気株式会社
海底分岐装置
1か月前
キヤノン株式会社
画像処理装置
15日前
株式会社NTTドコモ
端末
1か月前
パテントフレア株式会社
超高速電波通信
2か月前
沖電気工業株式会社
画像形成装置
1か月前
株式会社小糸製作所
画像照射装置
2か月前
有限会社フィデリックス
マイクロフォン
1か月前
株式会社JVCケンウッド
通信システム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ