TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134268
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032067
出願日
2024-03-04
発明の名称
撮像システム
出願人
キヤノン株式会社
代理人
個人
主分類
H04N
23/695 20230101AFI20250909BHJP(電気通信技術)
要約
【課題】撮像装置の撮影方向を適切に指示できるようにする。
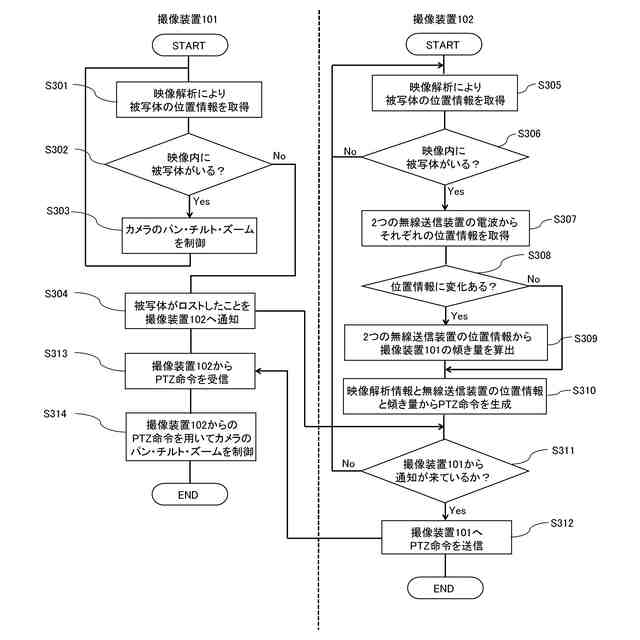
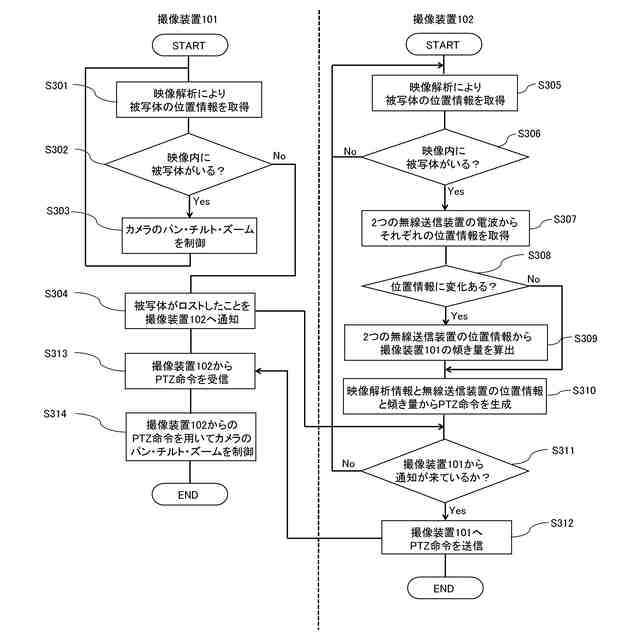
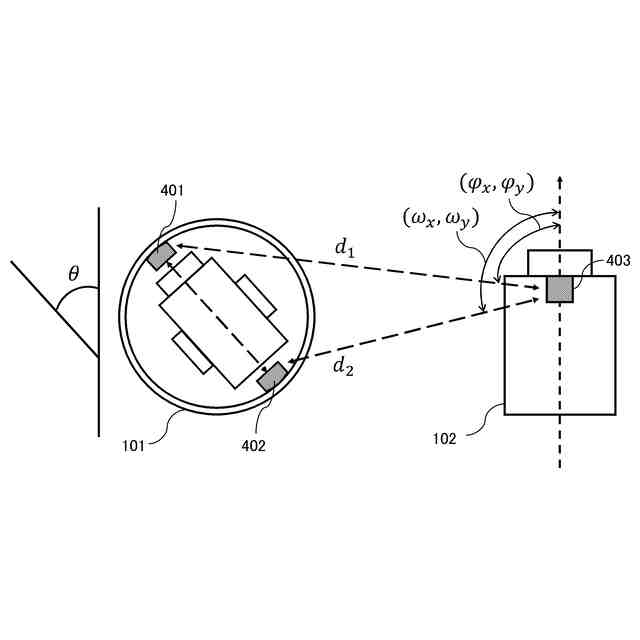
【解決手段】撮像システムは、第1の撮像装置と、第2の撮像装置とを有し、前記第1の撮像装置は、第1の撮像部により撮影された映像において被写体が存在する場合には、前記被写体を追尾するように、前記第1の撮像装置の撮影方向を制御し、第1の撮像部により撮影された映像において被写体が存在しない場合には、前記第2の撮像装置の指示に応じて、前記第1の撮像装置の撮影方向を制御する制御手段を有し、前記第2の撮像装置は、前記第1の撮像装置から受信した電波を基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得する傾き取得手段と、前記傾き量を基に、前記第1の撮像装置が被写体を画角内に捉えることができるように、前記第1の撮像装置に対して前記第1の撮像装置の撮影方向を指示する指示手段とを有する。
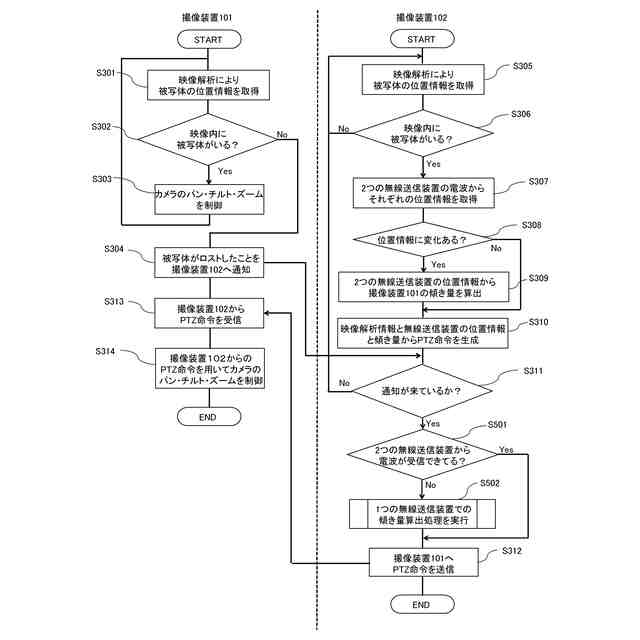
【選択図】図3
特許請求の範囲
【請求項1】
第1の撮像装置と、
第2の撮像装置とを有し、
前記第1の撮像装置は、
第1の撮像部により撮影された映像において被写体が存在する場合には、前記被写体を追尾するように、前記第1の撮像装置の撮影方向を制御し、第1の撮像部により撮影された映像において被写体が存在しない場合には、前記第2の撮像装置の指示に応じて、前記第1の撮像装置の撮影方向を制御する制御手段を有し、
前記第2の撮像装置は、
前記第1の撮像装置から受信した電波を基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得する傾き取得手段と、
前記傾き量を基に、前記第1の撮像装置が被写体を画角内に捉えることができるように、前記第1の撮像装置に対して前記第1の撮像装置の撮影方向を指示する指示手段とを有することを特徴とする撮像システム。
続きを表示(約 1,800 文字)
【請求項2】
前記第2の撮像装置は、第2の撮像部により撮影された映像の中の被写体の位置情報を取得する第1の位置取得手段をさらに有し、
前記指示手段は、前記傾き量と前記被写体の位置情報とを基に、前記第1の撮像装置が被写体を画角内に捉えることができるように、前記第1の撮像装置に対して前記第1の撮像装置の撮影方向を指示することを特徴とする請求項1に記載の撮像システム。
【請求項3】
前記第1の撮像装置は、前記第1の位置から第1の電波を送信し、前記第1の位置とは異なる第2の位置から第2の電波を送信する無線送信装置をさらに有し、
前記第2の撮像装置は、前記第1の電波と前記第2の電波を受信する無線受信装置をさらに有し、
前記傾き取得手段は、前記無線受信装置が受信した前記第1の電波と前記第2の電波を基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得することを特徴とする請求項2に記載の撮像システム。
【請求項4】
前記無線送信装置は、
前記第1の位置から前記第1の電波を送信する第1の無線送信装置と、
前記第2の位置から前記第2の電波を送信する第2の無線送信装置とを有することを特徴とする請求項3に記載の撮像システム。
【請求項5】
前記無線送信装置は、前記第1の位置から前記第1の電波を送信した後、前記第2の位置から前記第2の電波を送信することを特徴とする請求項3に記載の撮像システム。
【請求項6】
前記傾き取得手段は、前記無線受信装置が前記第1の無線送信装置の前記第1の電波と前記第2の無線送信装置の前記第2の電波を受信できた場合には、前記第1の無線送信装置の前記第1の電波と前記第2の無線送信装置の前記第2の電波を基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得し、
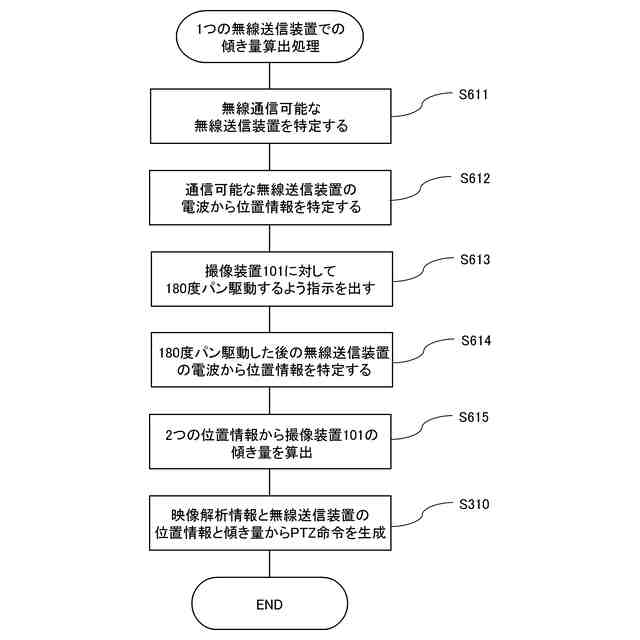
前記指示手段は、前記無線受信装置が前記第1の無線送信装置の前記第1の電波を受信できて、前記第2の無線送信装置の前記第2の電波を受信できなかった場合には、前記第1の無線送信装置が前記第2の位置になるように、前記第1の撮像装置に対して前記第1の撮像装置の撮影方向を指示し、
前記第1の無線送信装置は、前記指示手段の指示に応じて、前記第2の位置から第2の電波を送信し、
前記傾き取得手段は、前記無線受信装置が前記第1の無線送信装置の前記第1の電波を受信できて、前記第2の無線送信装置の前記第2の電波を受信できなかった場合には、前記第1の無線送信装置の前記第1の電波と前記第1の無線送信装置の前記第2の電波を基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得することを特徴とする請求項4に記載の撮像システム。
【請求項7】
前記第2の撮像装置は、前記無線受信装置が受信した前記第1の電波と前記第2の電波を基に、前記第1の位置の位置情報と前記第2の位置の位置情報を取得する第2の位置取得手段をさらに有し、
前記傾き取得手段は、前記第1の位置の位置情報と前記第2の位置の位置情報とを基に、前記第2の撮像装置に対する前記第1の撮像装置の傾き量を取得することを特徴とする請求項3に記載の撮像システム。
【請求項8】
前記指示手段は、前記傾き量と、前記被写体の位置情報と、前記第1の位置の位置情報と前記第2の位置の位置情報とを基に、前記第1の撮像装置が被写体を画角内に捉えることができるように、前記第1の撮像装置に対して前記第1の撮像装置の撮影方向を指示することを特徴とする請求項7に記載の撮像システム。
【請求項9】
前記第2の位置取得手段は、前記第1の電波の飛来方向と前記第2の電波の飛来方向を計算し、前記第1の電波の飛来方向と前記第2の電波の飛来方向とを基に、前記第1の位置の位置情報と前記第2の位置の位置情報を取得することを特徴とする請求項7に記載の撮像システム。
【請求項10】
前記第1の位置の位置情報は、前記無線受信装置に対する前記第1の位置の距離と方位角と仰角を含み、
前記第2の位置の位置情報は、前記無線受信装置に対する前記第2の位置の距離と方位角と仰角を含むことを特徴とする請求項7に記載の撮像システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、撮像システム、撮像装置、撮像システムの制御方法、撮像装置の制御方法、及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、パン・チルト・ズームの制御が可能なリモートカメラが知られている。当該リモートカメラでは、被写体を画面内に捉え続けるように、撮像方向を自動的に制御する機能(自動追尾)を備えるものがある。以下、パン・チルト・ズームをPTZと記す。
【0003】
ここで、被写体が画面内に大きく映っているときに、その被写体が速く移動した場合に、カメラのPTZの制御による追尾が間に合わず、被写体がロストしてしまう場合がある。このような場合に、被写体の追尾をするカメラとは別に、より広い撮像範囲で被写体を画面内に捉え続けるカメラを用いて被写体の追尾を再開する方法がある。以下、被写体の追尾をするカメラをPTZカメラ、広い撮像範囲で被写体を画面内に捉え続けるカメラを俯瞰カメラと示す。
【0004】
この方法では、PTZカメラと俯瞰カメラとの間の相対位置を予め計測する。PTZカメラが被写体をロストした際に、俯瞰カメラで捉え続けている被写体の位置情報と予め計測していた相対位置情報から、PTZカメラが被写体を再度補足できるようなPTZ命令を生成する。このPTZ命令を基にPTZカメラがPTZ駆動をすることで、被写体の追尾を再開することができる。
【0005】
PTZカメラと俯瞰カメラ間の相対位置計測を手動で行った場合、その計測情報が不正確となり、ずれた位置へのPTZ命令を生成する場合がある。
【0006】
特許文献1には、相対位置の計測方法として、Bluetooth(登録商標)やWi-Fi(登録商標)などを用いた無線位置測位手法を用いた、撮像装置と他の撮像装置のそれぞれの相対位置の取得方法が開示されている。
【0007】
特許文献2には、共通のマーカーによって相対位置が算出された2台の撮像装置において動きが生じた際に、予め撮影された背景画像と動いた後の背景画像間での特徴点の差分から位置ずれの量を算出し、相対位置変換式へそのずれを反映する方法が開示されている。
【先行技術文献】
【特許文献】
【0008】
特開2023-25897号公報
特開2022-101959号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1では、無線位置測位手法では撮像装置間の傾きを検知できないため、PTZカメラの雲台の正面の位置が俯瞰カメラの正面の位置に対して平行でない場合に、ずれた位置へのPTZ命令を生成することになる。その結果、ずれた位置へのPTZ命令を使用した場合、画角内に被写体を収めることが困難になる。
【0010】
特許文献2では、ずれ量算出として半永久的に移動することがない物体が存在する背景である必要があり、またずれた結果共通の物体がない場合算出できないなど、使用できる場所の制約がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ