TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161118
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064038
出願日
2024-04-11
発明の名称
杭打機の制御システム
出願人
日本車輌製造株式会社
代理人
個人
,
個人
主分類
E02D
7/00 20060101AFI20251017BHJP(水工;基礎;土砂の移送)
要約
【課題】ロッド掴み替え作業に必要なオーガ移動量を最適化し、安全かつ効率よく施工を進めることが可能な杭打機の制御システムを提供する。
【解決手段】オペレータのオーガ駆動操作に従って、ロッド17の下端に連結した掘削具19で掘削孔を形成する杭打機11の制御システムであって、制御部は、現在深度がロッド掴み替え点の深度に達したときに、報知部を作動させ、ロッド掴み替えの作業開始の指示を受けて、目標深度と現在深度との差分からなる上昇移動量を求め、下部ガイド18のチャック機構(固定手段)を閉作動してロッドを固定した状態で、オーガ15のチャック機構(把持手段)を開作動してロッドの把持を解除し、上昇移動量の分だけオーガを上昇駆動し、オーガのチャック機構を閉作動してロッドを把持した状態で、下部ガイドのチャック機構を開作動してロッドの固定を解除する。
【選択図】図9
特許請求の範囲
【請求項1】
ロッドを把持する開閉可能な把持手段を備えたオーガと、
該オーガの昇降を案内するリーダと、
前記ロッドを定位置に固定する開閉可能な固定手段と、
施工予定位置に対する目標深度及びロッド掴み替え点の深度を設定した施工計画データを記憶する記憶部と、
施工の現在深度を取得するための深度センサと、
前記目標深度、前記ロッド掴み替え点の深度、前記現在深度を用いてロッド掴み替えの作業に要する前記オーガの移動方向及び移動量を求める制御部と、
前記ロッド掴み替えの作業開始をオペレータに促す報知部と、
前記ロッド掴み替えの作業開始の指示を前記オペレータが入力する操作入力部と、
を備え、
前記オペレータのオーガ駆動操作に従って、前記ロッドの下端に連結した掘削具で掘削孔を形成する杭打機の制御システムであって、
前記制御部は、
前記現在深度がロッド掴み替え点の深度に達したときに、前記報知部を作動させ、
前記ロッド掴み替えの作業開始の指示を受けて、前記目標深度と前記現在深度との差分からなる上昇移動量を求め、
前記固定手段を閉作動して前記ロッドを固定した状態で、前記把持手段を開作動して前記ロッドの把持を解除し、
前記上昇移動量の分だけ前記オーガを上昇駆動し、
前記把持手段を閉作動して前記ロッドを把持した状態で、前記固定手段を開作動して前記ロッドの固定を解除することを特徴とする杭打機の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、杭打機の制御システムに関し、詳しくは、杭施工用のオーガを備えた杭打機の制御システムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
一般に、リーダに沿って昇降するオーガを備えた杭打機は、その構造上、オーガ昇降における1ストローク長さ(1回あたりの施工長さ)が、リーダの長さを限度として制限される。したがって、ロッドを把持したオーガがリーダの下端部に到達したときに、より深く掘り進めるには、ロッドの把持を解除したオーガを上昇させて、ロッドを把持し直す、いわゆるロッド掴み替え作業が行われる(例えば、特許文献1参照)。また、ロッド掴み替え作業の利便性を考慮して、ロッドを任意の位置で把持できるチャック機構を備えたオーガが開発され、運用に至っている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-121467号公報
特開2022-92343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献2に記載されるように、ロッドを任意の位置で把持できるオーガが登場したことで、把持位置の自由度が得られるものとなった。しかしながら、把持位置を任意に設定できる利点がある反面、オーガに無駄な動作を生じさせやすいという不利な面がある。したがって、ロッド掴み替え作業においては、無駄のない最適なオーガ移動量を決定し、これをオーガの動作に安全に反映させる技術が求められていた。
【0005】
そこで本発明は、ロッド掴み替え作業に必要なオーガ移動量を最適化し、安全かつ効率よく施工を進めることが可能な杭打機の制御システムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の杭打機の制御システムは、ロッドを把持する開閉可能な把持手段を備えたオーガと、該オーガの昇降を案内するリーダと、前記ロッドを定位置に固定する開閉可能な固定手段と、施工予定位置に対する目標深度及びロッド掴み替え点の深度を設定した施工計画データを記憶する記憶部と、施工の現在深度を取得するための深度センサと、前記目標深度、前記ロッド掴み替え点の深度、前記現在深度を用いてロッド掴み替えの作業に要する前記オーガの移動方向及び移動量を求める制御部と、前記ロッド掴み替えの作業開始をオペレータに促す報知部と、前記ロッド掴み替えの作業開始の指示を前記オペレータが入力する操作入力部と、を備え、前記オペレータのオーガ駆動操作に従って、前記ロッドの下端に連結した掘削具で掘削孔を形成する杭打機の制御システムであって、前記制御部は、前記現在深度がロッド掴み替え点の深度に達したときに、前記報知部を作動させ、前記ロッド掴み替えの作業開始の指示を受けて、前記目標深度と前記現在深度との差分からなる上昇移動量を求め、前記固定手段を閉作動して前記ロッドを固定した状態で、前記把持手段を開作動して前記ロッドの把持を解除し、前記上昇移動量の分だけ前記オーガを上昇駆動し、前記把持手段を閉作動して前記ロッドを把持した状態で、前記固定手段を開作動して前記ロッドの固定を解除することを特徴としている。
【発明の効果】
【0007】
本発明の杭打機の制御システムによれば、現在深度がロッド掴み替え深度に達したときに、報知部を作動させてロッド掴み替えの作業開始の指示を待つので、オペレータの運転操作を遮らずにオペレータの意思でロッド掴み替え作業へと安全に移行できるようになる。しかも、ロッド掴み替え作業の開始から完了までの一連の動作を自動で行うので、従来からの施工計画を用いて構築された簡易的なシステムでありながら、オペレータの操作負担低減が大きく図れるものとなる。とりわけ、目標深度と現在深度との差分からなる上昇移動量を求めるので、報知部が作動した後の施工の進捗を考慮して、目標深度までの残工程を必要最小のオーガ移動量で達成することができる。
【図面の簡単な説明】
【0008】
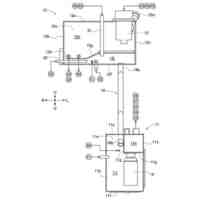
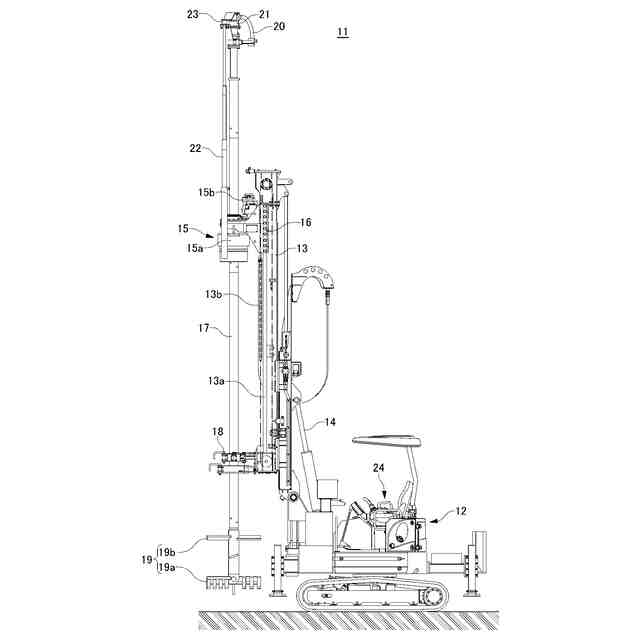
本発明の制御システムが適用される地盤改良仕様の杭打機の側面図である。
同じく施工計画データの設定表示画面を示す図である。
同じく施工計画データの構成を示す図である。
同じくロッド掴み替え点に到達してから次のロッド掴み替え点を発見する手順を示すフローチャートである。
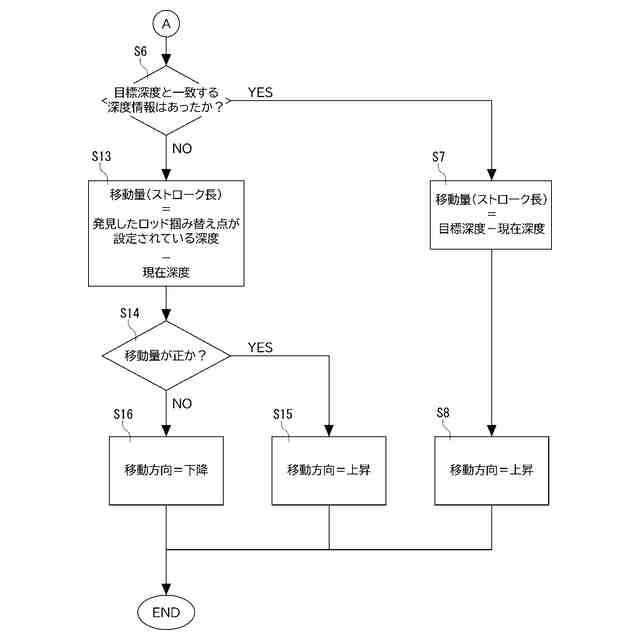
同じく次のロッド掴み替え点を発見している場合のオーガ移動量及び移動方向を決定する手順を示すフローチャートである。
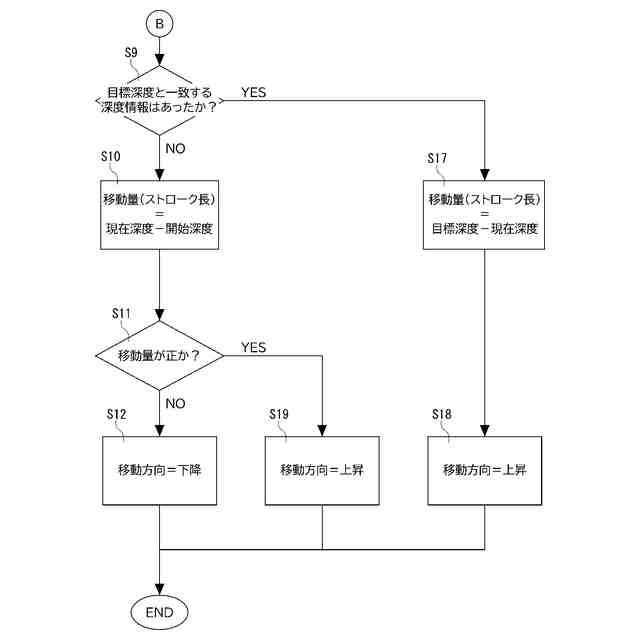
同じく次のロッド掴み替え点を発見していない場合のオーガ移動量及び移動方向を決定する手順を示すフローチャートである。
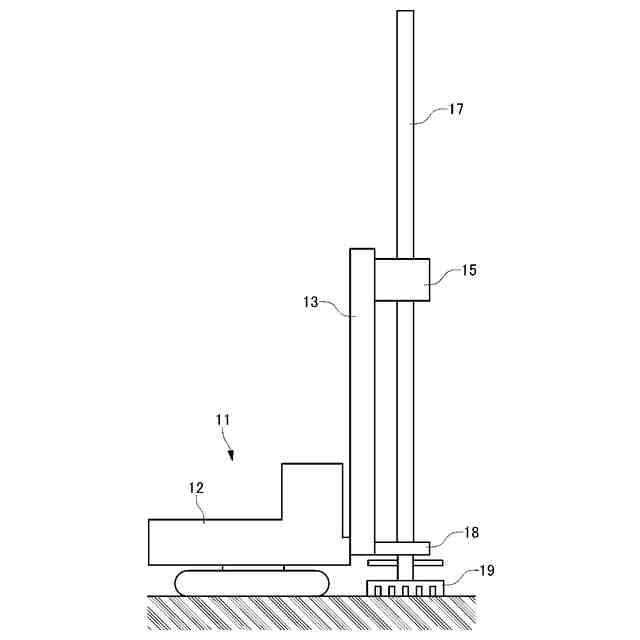
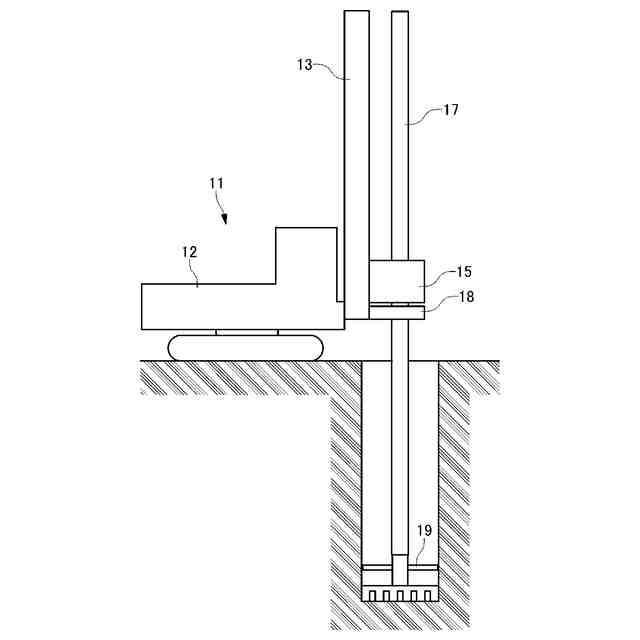
同じくオーガにロッドを装着した杭打機の施工開始状態(深度0m)を示す説明図である。
同じく掘削工程におけるロッド掴み替え深度到達状態(深度6m)を示す説明図である。
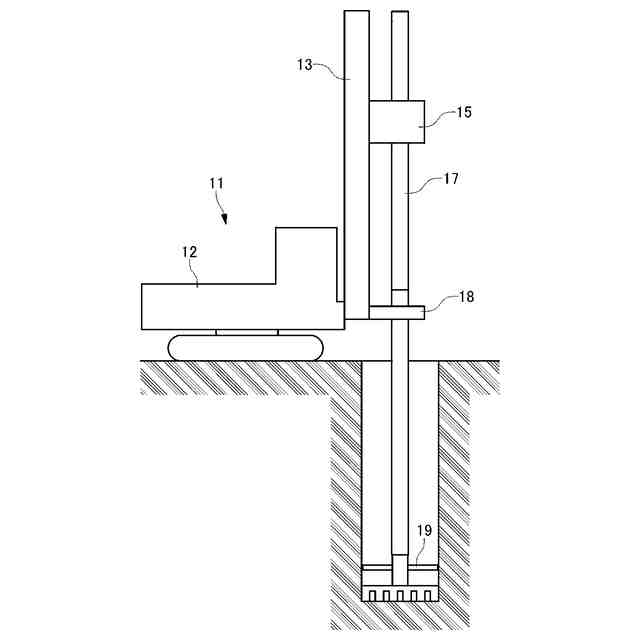
同じくロッド掴み替え作業におけるオーガ上昇停止状態を示す説明図である。
同じく掘削工程完了状態(深度10m)を示す説明図である。
同じく引上工程におけるロッド掴み替え深度到達状態(深度6m)を示す説明図である。
同じくロッド掴み替え作業におけるオーガ下降停止状態を示す説明図である。
同じく施工完了状態を示す説明図である。
同じく施工計画データの構成の変形例を示す図である。
同じく施工計画データの構成の他の変形例を示す図である。
【発明を実施するための形態】
【0009】
図1乃至図15は、本発明の杭打機の制御システムを示すもので、本形態例に示す制御システムが適用される杭打機11は、鋼管杭施工と地盤改良施工とを切り替えて行うことができる兼用機であって、図1に示すように、履帯走行する走行部を備えたベースマシン12の前部にリーダ13を立設し、該リーダ13をバックステー14にて支持している。リーダ13の長手方向に沿って設けられた左右一対のガイドパイプ13aには、オーガ(ロッド回転駆動装置)15が、ガイドギブ16を介して連結されるとともに、リーダ13の長手方向に掛け渡したチェーン13bによって昇降可能に設けられている。また、リーダ13の下部には、オーガ15により回転するロッド17をガイドする下部ガイド18が設けられている。この下部ガイド18には、油圧で開閉作動するチャック機構(固定手段)が設けられている。チャック機構の構造、動作原理は、特許文献1に記載のロッド支持装置を参照することができる。
【0010】
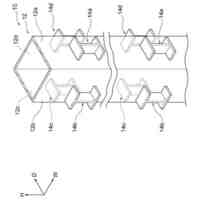
ロッド17は、内部に地盤改良剤の流路を備えたパイプ状の施工部材であって、複数本連結してリーダ13よりも長尺に形成され、下端には掘削刃19aと撹拌羽根19bとを備えた掘削具19が連結されている。また、ロッド17の外周には全長に亘り、円形断面の外周を周方向等間隔に4箇所切り欠いて形成した平面部が設けられており、該4箇所の平面部からなる4面幅寸法は、円形断面の円周部分の外径寸法よりも僅かに小さくなっている。これにより、ロッド17の外周面は、円弧曲面部からなる領域が大きく占められ、実質的に角張った箇所が生じることのない略曲面状に形成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本車輌製造株式会社
杭打機
1日前
日本車輌製造株式会社
建設機械
5日前
日本車輌製造株式会社
鉄道車両
5日前
日本車輌製造株式会社
鉄道車両用台車
5日前
日本車輌製造株式会社
鉄道車両用台車
5日前
日本車輌製造株式会社
支持ユニット、分岐装置および分岐装置の施工方法
12日前
株式会社クボタ
作業車
今日
日立建機株式会社
作業機械
今日
株式会社竹中工務店
構真柱
今日
株式会社冨士機
流動化処理土の製造方法及び流動化処理土
今日
他の特許を見る


 特許ウォッチ
特許ウォッチ