TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148762
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049049
出願日
2024-03-26
発明の名称
作業機械の表示システム、作業機械、及び作業機械の表示方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/26 20060101AFI20251001BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械のオペレータが作業現場に存在する段差を認識し易くすること。
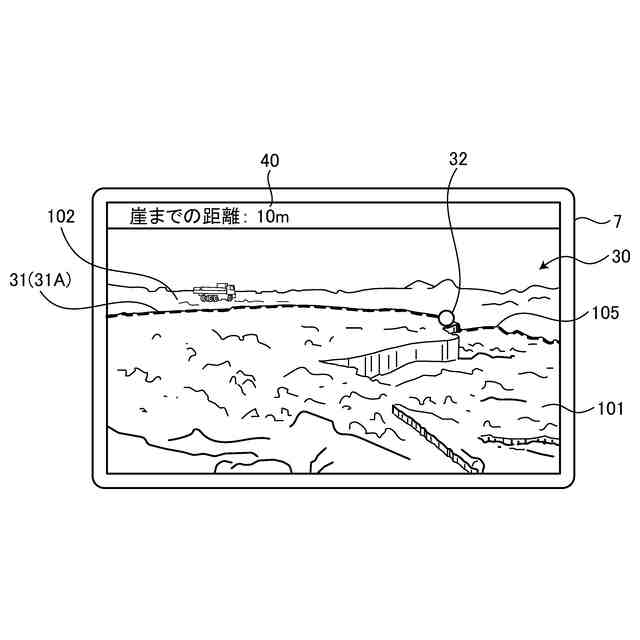
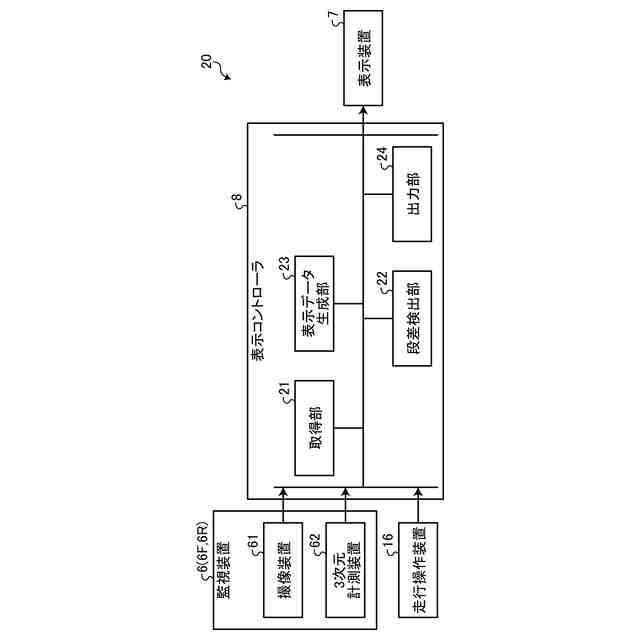
【解決手段】作業機械の表示システムは、作業機械の周辺の画像を含む検出データを取得する取得部と、検出データに基づいて、作業機械が走行する作業現場の第1地面と第1地面よりも下方に存在する第2地面との段差を検出する段差検出部と、周辺画像と段差の位置を示す位置画像とを含む表示データを生成する表示データ生成部と、表示データを表示装置に表示させる出力部と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
作業機械の周辺の画像を示す周辺画像を含む検出データを取得する取得部と、
前記検出データに基づいて、前記作業機械が走行する作業現場の第1地面と前記第1地面よりも下方に存在する第2地面との段差を検出する段差検出部と、
前記周辺画像と前記段差の位置を示す位置画像とを含む表示データを生成する表示データ生成部と、
前記表示データを表示装置に表示させる出力部と、を備える、
作業機械の表示システム。
続きを表示(約 970 文字)
【請求項2】
前記検出データは、前記周辺の3次元形状を示す形状データを含み、
前記形状データは、前記周辺の表面に規定された複数の検出点からなる3次元点群データを含み、
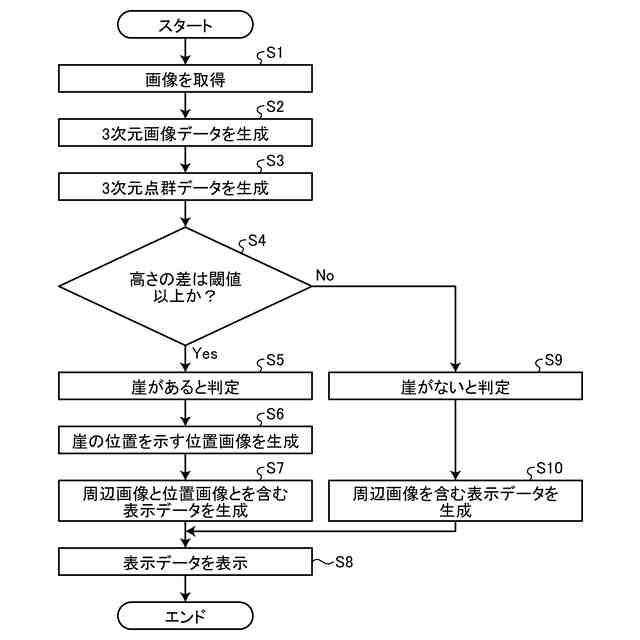
前記段差検出部は、第1の検出点の高さと第2の検出点の高さとの差が予め定められている閾値以上である場合、第1の検出点と第2の検出点との間に崖があると判定する、
請求項1に記載の作業機械の表示システム。
【請求項3】
前記表示データ生成部は、前記周辺画像に前記位置画像が重畳するように前記表示データを生成する、
請求項1に記載の作業機械の表示システム。
【請求項4】
前記表示データ生成部は、前記周辺画像における段差に前記位置画像が重畳するように前記表示データを生成する、
請求項3に記載の作業機械の表示システム。
【請求項5】
前記表示データ生成部は、前記周辺画像における前記第1地面の端部に前記位置画像が重畳するように前記表示データを生成する、
請求項4に記載の作業機械の表示システム。
【請求項6】
前記位置画像は、前記周辺画像における前記第1地面の端部の長手方向に沿うライン状である、
請求項5に記載の作業機械の表示システム。
【請求項7】
前記位置画像は、前記周辺画像における前記第1地面に重畳する第1色彩の第1エリア画像と、前記第2地面に重畳する第2色彩の第2エリア画像とを含む、
請求項1に記載の作業機械の表示システム。
【請求項8】
前記段差検出部は、前記作業機械の進行方向にある段差を検出する、
請求項1に記載の作業機械の表示システム。
【請求項9】
前記表示データ生成部は、前記作業機械と前記段差との距離に基づいて、前記位置画像の表示形態を変更する、
請求項8に記載の作業機械の表示システム。
【請求項10】
前記表示データ生成部は、前記進行方向に複数の段差が検出された場合、前記作業機械に最も近い段差に前記位置画像が重畳するように前記表示データを生成する、
請求項8に記載の作業機械の表示システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の表示システム、作業機械、及び作業機械の表示方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているようなブルドーザが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2012-062620号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械は、作業現場を走行する。作業現場に崖のような大きい段差がある可能性がある。段差が作業機械のオペレータの死角に入ると、オペレータは段差を認識することが困難となる。また、作業現場の地面の状況によっては、オペレータは段差を認識することが困難となる可能性がある。作業現場の地面は土砂である場合が多い。作業現場の地面が土砂である場合、オペレータは作業現場の段差を視認し難くなる可能性がある。また、作業現場の地面に凹凸がある可能性が高い。作業現場の地面に凹凸がある場合、オペレータは作業現場の段差を視認し難くなる可能性がある。
【0005】
本開示は、作業機械のオペレータが作業現場に存在する段差を認識し易くすることを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機械の周辺の画像を示す周辺画像を含む検出データを取得する取得部と、検出データに基づいて、作業機械が走行する作業現場の第1地面と第1地面よりも下方に存在する第2地面との段差を検出する段差検出部と、周辺画像と段差の位置を示す位置画像とを含む表示データを生成する表示データ生成部と、表示データを表示装置に表示させる出力部と、を備える、作業機械の表示システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業機械のオペレータが作業現場に存在する段差を認識し易くなる。
【図面の簡単な説明】
【0008】
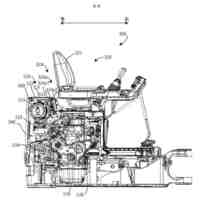
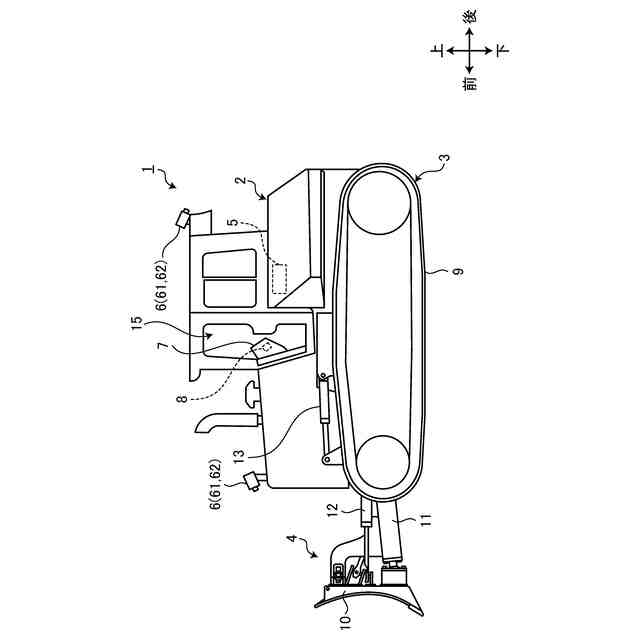
図1は、第1実施形態に係る作業機械を模式的に示す側面図である。
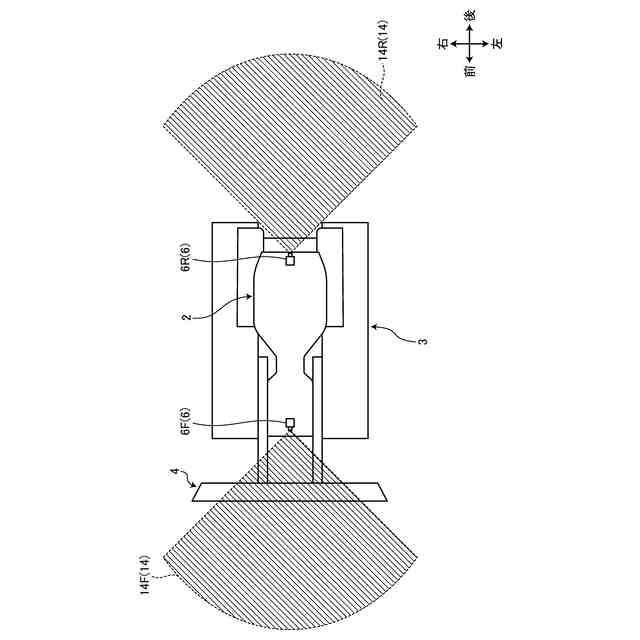
図2は、第1実施形態に係る作業機械を模式的に示す平面図である。
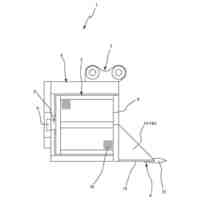
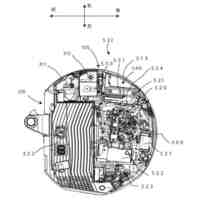
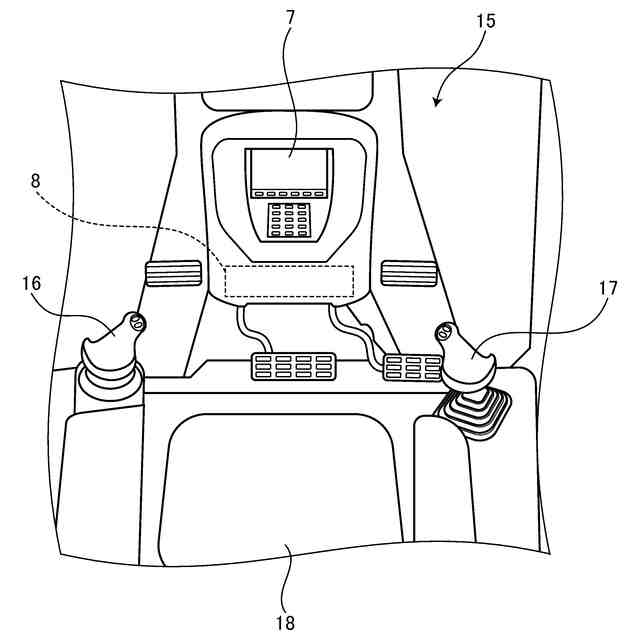
図3は、第1実施形態に係る作業機械の運転室を模式的に示す図である。
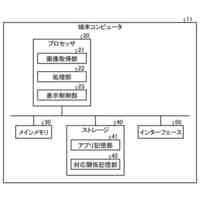
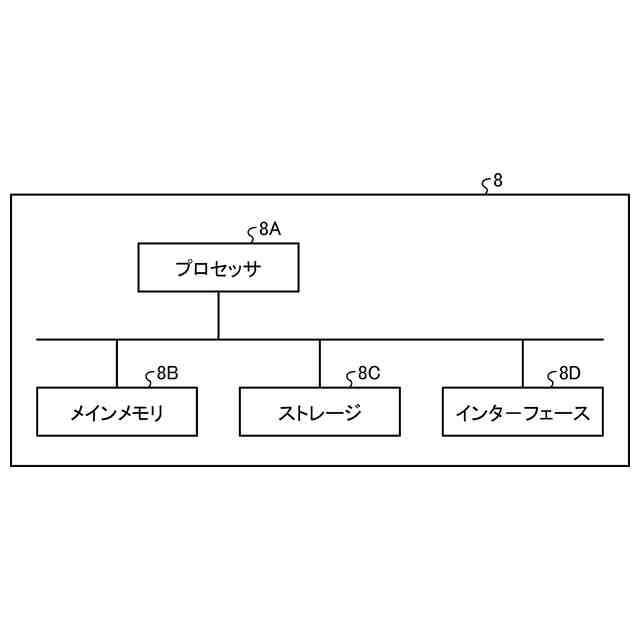
図4は、第1実施形態に係る表示コントローラを示すハードウエア構成図である。
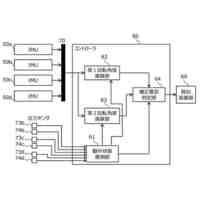
図5は、第1実施形態に係る作業機械の表示システムを示すブロック図である。
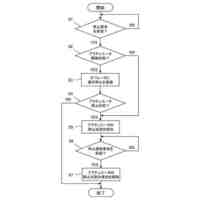
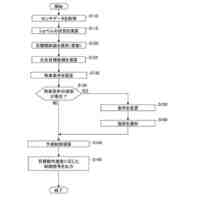
図6は、第1実施形態に係る作業機械の表示方法を示すフローチャートである。
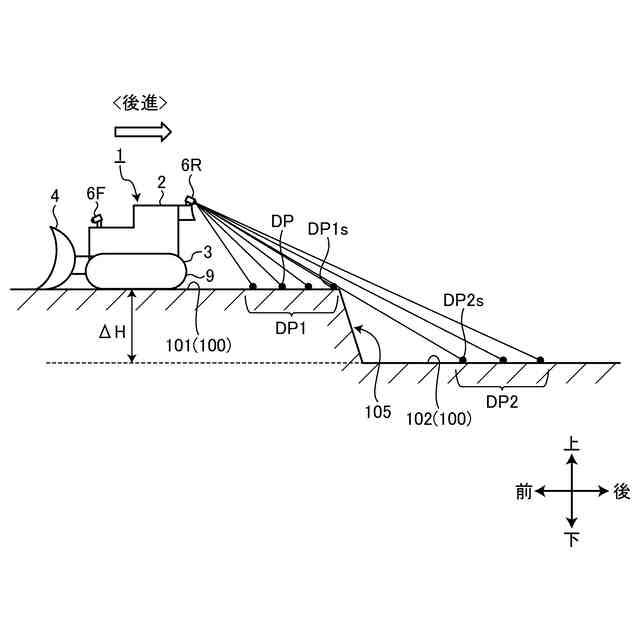
図7は、第1実施形態に係る作業機械の動作を説明する図である。
図8は、第1実施形態に係る作業機械の動作を説明する図である。
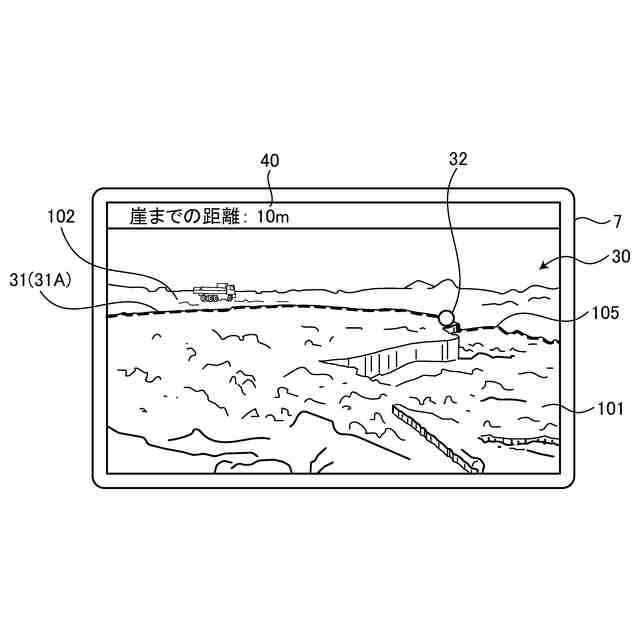
図9は、第1実施形態に係る表示装置に表示された表示データの一例を示す図である。
図10は、第1実施形態に係る表示装置に表示された表示データの一例を示す図である。
図11は、第1実施形態に係る表示装置に表示された表示データの一例を示す図である。
図12は、第1実施形態に係る表示装置に表示された表示データの一例を示す図である。
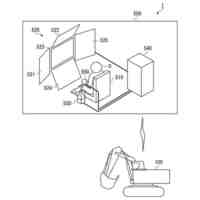
図13は、第2実施形態に係る作業機械の遠隔操作システムを模式的に示す図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
実施形態においては、前、後、左、右、上、及び下の用語を用いて各部の位置関係について説明する。これらの用語は、作業機械1の中心を基準とする相対位置又は方向を示す。これらの用語は、作業機械1に設定されるローカル座標系における位置又は方向であるとみなされてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
11日前
株式会社小松製作所
磁気結合型リアクトル
11日前
株式会社小松製作所
評価装置および評価方法
6日前
株式会社小松製作所
制御システムおよび制御方法
11日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
11日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
11日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
11日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
12日前
個人
バケット
19日前
個人
建物の不同沈下の修正方法
26日前
千代田工営株式会社
回転貫入杭
1か月前
株式会社大林組
操縦装置
22日前
株式会社富田製作所
継手部構造
19日前
株式会社熊谷組
山留壁用親杭
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
12日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
FKS株式会社
擁壁及び擁壁の築造方法
21日前
鹿島建設株式会社
接続方法および接続構造
1か月前
ライト工業株式会社
鉄筋保持用治具
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
27日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ