TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147505
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047778
出願日
2024-03-25
発明の名称
作業機械、及び、作業機械を制御するための方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/02 20060101AFI20250930BHJP(水工;基礎;土砂の移送)
要約
【課題】トランスミッションを適切に潤滑すると共に、作業機械におけるエネルギー効率を向上させる。
【解決手段】作業機械は、車体と、走行体と、トランスミッションと、走行モータと、作業機と、潤滑ポンプと、コントローラとを備える。走行体は、車体を走行させる。トランスミッションは、走行体に接続される。走行モータは、トランスミッションに接続される。作業機は、車体に動作可能に取り付けられる。潤滑ポンプは、トランスミッションに潤滑油を供給する。コントローラは、トランスミッションを通過する走行馬力を取得する。コントローラは、走行馬力に基づいてトランスミッションの潤滑油の必要潤滑量を算出する。コントローラは、必要潤滑量に基づいて、潤滑ポンプの吐出量を制御する。
【選択図】図4
特許請求の範囲
【請求項1】
車体と、
前記車体を走行させる走行体と、
前記走行体に接続されるトランスミッションと、
前記トランスミッションに接続される走行モータと、
前記車体に動作可能に取り付けられる作業機と、
前記トランスミッションに潤滑油を供給する潤滑ポンプと、
前記トランスミッションを通過する走行馬力を取得し、前記走行馬力に基づいて前記トランスミッションの潤滑油の必要潤滑量を算出し、前記必要潤滑量に基づいて、前記潤滑ポンプの吐出量を制御するコントローラと、
を備える作業機械。
続きを表示(約 2,200 文字)
【請求項2】
前記作業機を駆動する作業機モータをさらに備え、
前記潤滑ポンプは、前記作業機モータによって駆動される固定容量ポンプであり、
前記コントローラは、
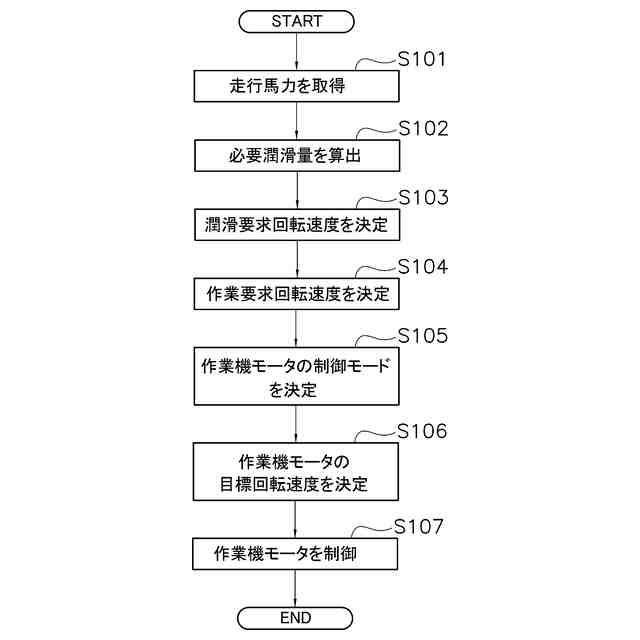
前記必要潤滑量に基づいて、前記作業機モータの目標回転速度を決定し、
前記目標回転速度に基づいて、前記作業機モータを制御する、
請求項1に記載の作業機械。
【請求項3】
前記コントローラは、
前記必要潤滑量に基づいて、前記作業機モータの潤滑要求回転速度を決定し、
前記作業機を動作させる操作指令を取得し、
前記操作指令に基づいて、前記作業機を動作させるための前記作業機モータの作業要求回転速度を決定し、
前記潤滑要求回転速度が前記作業要求回転速度よりも大きい場合には、前記潤滑要求回転速度に基づいて、前記作業機モータの目標回転速度を決定し、
前記作業要求回転速度が前記潤滑要求回転速度よりも大きい場合には、前記作業要求回転速度に基づいて、前記作業機モータの目標回転速度を決定し、
前記目標回転速度に基づいて、前記作業機モータを制御する、
請求項2に記載の作業機械。
【請求項4】
前記コントローラは、
前記作業機モータの所定のアイドリング回転速度を取得し、
前記必要潤滑量に基づいて、前記作業機モータの潤滑要求回転速度を決定し、
前記アイドリング回転速度が前記潤滑要求回転速度より大きい場合には、前記アイドリング回転速度に基づいて、前記作業機モータの目標回転速度を決定し、
前記潤滑要求回転速度が前記アイドリング回転速度より大きい場合には、前記潤滑要求回転速度に基づいて、前記作業機モータの目標回転速度を決定し、
前記目標回転速度に基づいて、前記作業機モータを制御する、
請求項2に記載の作業機械。
【請求項5】
前記コントローラは、
前記潤滑ポンプの容量と前記必要潤滑量とに基づいて、前記作業機モータの目標回転速度を決定する、
請求項2に記載の作業機械。
【請求項6】
前記作業機を駆動する作業機モータをさらに備え、
前記潤滑ポンプは、前記作業機モータによって駆動される可変容量ポンプであり、
前記コントローラは、
前記必要潤滑量に基づいて、前記可変容量ポンプの目標容量を決定し、
前記目標容量に基づいて、前記潤滑ポンプを制御する、
請求項1に記載の作業機械。
【請求項7】
車体と、前記車体を走行させる走行体と、前記走行体に接続されるトランスミッションと、前記トランスミッションに接続される走行モータと、前記車体に動作可能に取り付けられる作業機と、前記トランスミッションに潤滑油を供給する潤滑ポンプと、を備える作業機械を制御するためのコントローラによって実行される方法であって、
前記トランスミッションを通過する走行馬力を取得することと、
前記走行馬力に基づいて前記トランスミッションの潤滑油の必要潤滑量を算出することと、
前記必要潤滑量に基づいて、前記潤滑ポンプの吐出量を制御すること、
を備える方法。
【請求項8】
前記作業機械は、前記作業機を駆動する作業機モータをさらに備え、
前記潤滑ポンプは、前記作業機モータによって駆動される固定容量ポンプであり、
前記必要潤滑量に基づいて、前記作業機モータの目標回転速度を決定することと、
前記目標回転速度に基づいて、前記作業機モータを制御すること、
を備える請求項7に記載の方法。
【請求項9】
前記必要潤滑量に基づいて、前記作業機モータの潤滑要求回転速度を決定することと、
前記作業機を動作させる操作指令を取得することと、
前記操作指令に基づいて、前記作業機を動作させるための前記作業機モータの作業要求回転速度を決定することと、
前記潤滑要求回転速度が前記作業要求回転速度よりも大きい場合には、前記潤滑要求回転速度に基づいて、前記作業機モータの目標回転速度を決定することと、
前記作業要求回転速度が前記潤滑要求回転速度よりも大きい場合には、前記作業要求回転速度に基づいて、前記作業機モータの目標回転速度を決定することと、
前記目標回転速度に基づいて、前記作業機モータを制御すること、
を備える請求項8に記載の方法。
【請求項10】
前記作業機モータの所定のアイドリング回転速度を取得することと、
前記必要潤滑量に基づいて、前記作業機モータの潤滑要求回転速度を決定することと、
前記アイドリング回転速度が前記潤滑要求回転速度より大きい場合には、前記アイドリング回転速度に基づいて、前記作業機モータの目標回転速度を決定することと、
前記潤滑要求回転速度が前記アイドリング回転速度より大きい場合には、前記潤滑要求回転速度に基づいて、前記作業機モータの目標回転速度を決定することと、
前記目標回転速度に基づいて、前記作業機モータを制御すること、
を備える請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、及び、作業機械を制御するための方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
作業機械には、トランスミッションに潤滑油を供給するための潤滑ポンプを備えるものがある。例えば、特許文献1の車両では、エンジンと、トランスミッションと、潤滑ポンプと、潤滑油供給油路とを備えている。潤滑ポンプは、エンジンによって駆動されることで、潤滑油を吐出する。潤滑油は、潤滑油供給油路を介して、トランスミッションに供給される。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2006/009080号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械では、例えば、登坂時、或いは高速走行時など、トランスミッションを通過する走行馬力が大きい場合には、トランスミッションには大量の潤滑油が必要となる。そのために容量の大きな潤滑ポンプを作業機械に搭載した場合には、走行馬力が小さいときであっても、潤滑ポンプは、大量の潤滑油をトランスミッションに供給する。そのため、作業機械のエネルギー効率が低下してしまう。本開示の目的は、トランスミッションを適切に潤滑すると共に、作業機械におけるエネルギー効率を向上させることにある。
【課題を解決するための手段】
【0005】
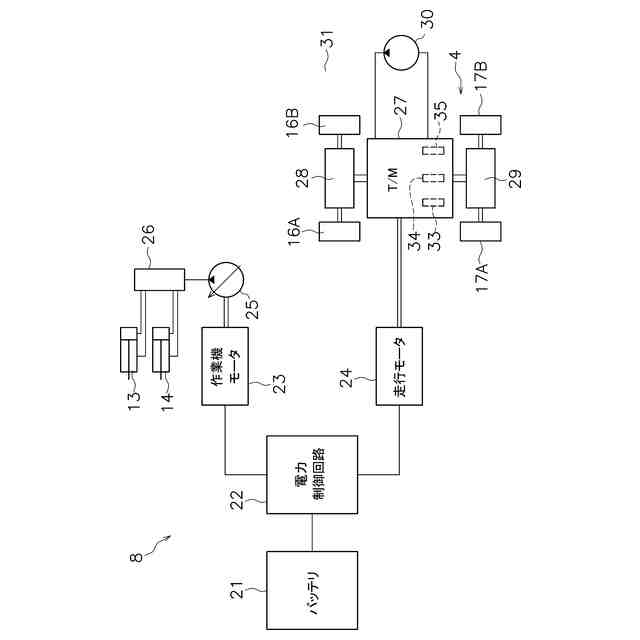
本開示の一態様に係る作業機械は、車体と、走行体と、トランスミッションと、走行モータと、作業機と、潤滑ポンプと、コントローラとを備える。走行体は、車体を走行させる。トランスミッションは、走行体に接続される。走行モータは、トランスミッションに接続される。作業機は、車体に動作可能に取り付けられる。潤滑ポンプは、トランスミッションに潤滑油を供給する。コントローラは、トランスミッションを通過する走行馬力を取得する。コントローラは、走行馬力に基づいてトランスミッションの潤滑油の必要潤滑量を算出する。コントローラは、必要潤滑量に基づいて、潤滑ポンプの吐出量を制御する。
【0006】
本開示の他の態様に係る方法は、作業機械を制御するためにコントローラによって実行される方法である。作業機械は、車体と、走行体と、トランスミッションと、走行モータと、作業機と、潤滑ポンプとを備える。走行体は、車体を走行させる。トランスミッションは、走行体に接続される。走行モータは、トランスミッションに接続される。作業機は、車体に動作可能に取り付けられる。潤滑ポンプは、トランスミッションに潤滑油を供給する。当該方法は、トランスミッションを通過する走行馬力を取得することと、走行馬力に基づいてトランスミッションの潤滑油の必要潤滑量を算出することと、必要潤滑量に基づいて、潤滑ポンプの吐出量を制御すること、を備える。
【発明の効果】
【0007】
本開示によれば、走行馬力に基づいてトランスミッションの潤滑油の必要潤滑量が算出される。そして、算出された必要潤滑量に基づいて、潤滑ポンプの吐出量が制御される。そのため、大容量の潤滑ポンプを用いることなく、走行馬力に応じて適切な量の潤滑油がトランスミッションに供給される。それにより、トランスミッションを適切に潤滑すると共に、作業機械におけるエネルギー効率が向上する。
【図面の簡単な説明】
【0008】
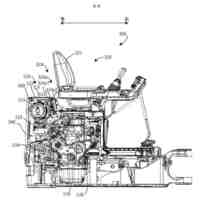
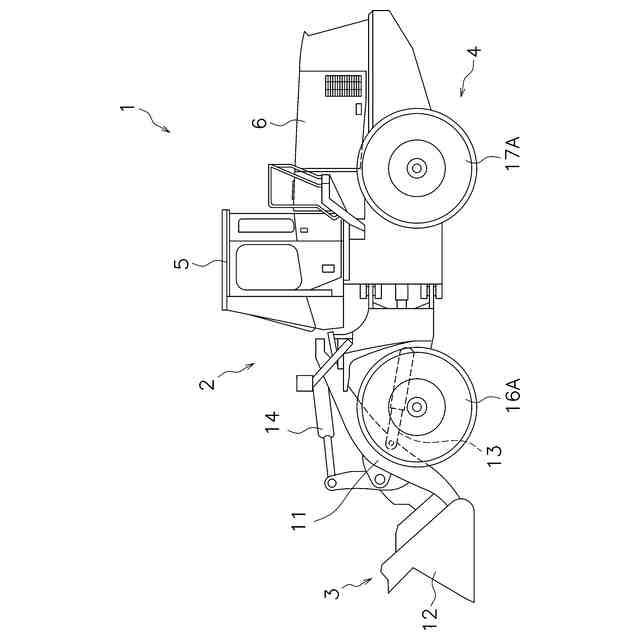
実施形態に係る作業機械の側面図である。
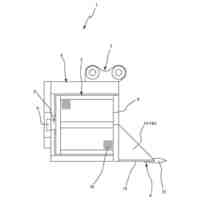
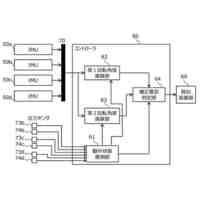
作業機械の駆動システムの構成を示すブロック図である。
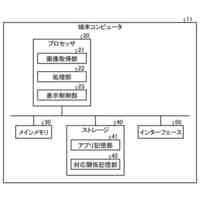
作業機械の制御システムの構成を示すブロック図である。
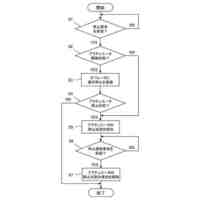
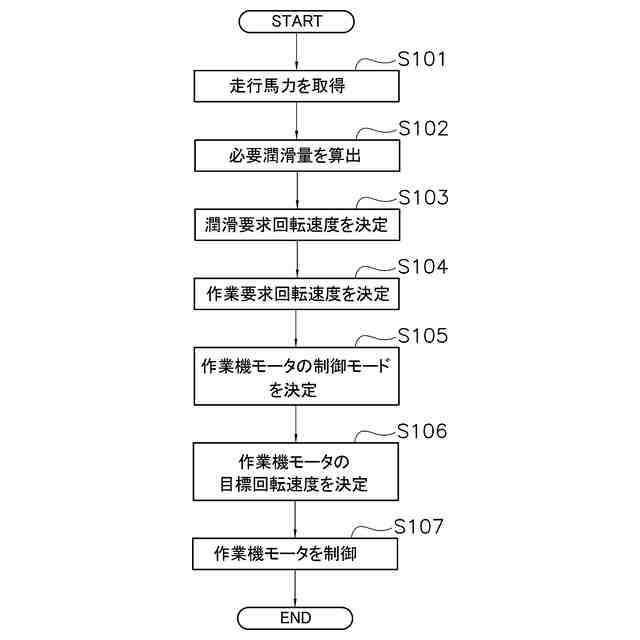
トランスミッションの潤滑制御の処理を示すフローチャートである。
作業機モータの制御モードの遷移図である。
他の実施形態に係る作業機械の駆動システムの構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明の実施形態について説明する。図1は、実施形態に係る作業機械1の側面図である。本実施形態に係る作業機械1は、ホイールローダである。図1に示すように、作業機械1は、車体2と、作業機3と、走行体4とを含む。車体2には、運転室5と動力室6とが配置されている。運転室5内には、図示しない運転席と、後述する操作装置とが配置される。動力室6内には、後述する駆動システムの一部が配置される。
【0010】
作業機3は、掘削等の作業に用いられる。作業機3は、車体2に対して動作可能に取り付けられている。作業機3は、ブーム11と、バケット12と、ブームシリンダ13と、バケットシリンダ14とを含む。ブームシリンダ13とバケットシリンダ14とは、油圧シリンダである。ブームシリンダ13が伸縮することによって、ブーム11が動作する。バケットシリンダ14が伸縮することによって、バケット12が動作する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
10日前
株式会社小松製作所
磁気結合型リアクトル
10日前
株式会社小松製作所
評価装置および評価方法
5日前
株式会社小松製作所
制御システムおよび制御方法
10日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
10日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
10日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
10日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
10日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
10日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
11日前
個人
バケット
18日前
個人
建物の不同沈下の修正方法
25日前
株式会社富田製作所
継手部構造
18日前
株式会社大林組
操縦装置
21日前
千代田工営株式会社
回転貫入杭
1か月前
株式会社熊谷組
山留壁用親杭
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
建設機械
11日前
日立建機株式会社
建設機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
FKS株式会社
擁壁及び擁壁の築造方法
20日前
鹿島建設株式会社
接続方法および接続構造
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
26日前
株式会社三誠
建物の免震構造
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ