TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150637
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051631
出願日
2024-03-27
発明の名称
作業機械システムおよび作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】アクチュエータのストールによる効率の低下を防ぐ。
【解決手段】作業機械の制御装置は、作業具の目標姿勢に従って作業具のアクチュエータの動作を指令する。制御装置は、アクチュエータの状態が所定条件を満たすときに目標姿勢を変更する。
【選択図】図2
特許請求の範囲
【請求項1】
複数の関節と、作業具とを含み本体に対し動作可能な作業機と、
前記作業機を駆動するアクチュエータと、
前記アクチュエータを制御する制御装置と、
を備え、
前記制御装置は、
前記作業具の目標姿勢に従って前記アクチュエータの動作を指令し、
前記指令に基づく前記アクチュエータの動作が動作不許可方向へ向かう動作である場合に、前記動作不許可方向への動作を制限する、
作業機械システム。
続きを表示(約 630 文字)
【請求項2】
前記制御装置は、
前記作業具による掘削後の荷を上方または下方へ移動する作業時に、前記作業機の目標姿勢に従って前記アクチュエータの動作を指令する、
請求項1に記載の作業機械システム。
【請求項3】
前記作業具はバケットであり、
前記作業具の目標姿勢は、対地基準で前記バケットの開口が水平となる姿勢である、
請求項2に記載の作業機械システム。
【請求項4】
前記アクチュエータは、前記作業具を駆動する動力シリンダであり、
前記動作不許可方向は、前記動力シリンダがストロークエンドに到達したときのストロークエンド側へ向かう方向であり、
前記制御装置は、前記動力シリンダがストロークエンドに到達したときに、前記アクチュエータが前記ストロークエンドを超えないように前記動作を制限する、
請求項1に記載の作業機械システム。
【請求項5】
複数の関節と、作業具とを含み本体に対し動作可能な作業機と、
前記作業機を駆動するアクチュエータと、
を備える作業機械の制御方法であって、
前記作業具の目標姿勢に従って前記アクチュエータの動作を指令するステップと、
前記指令に基づく前記アクチュエータの動作が動作不許可方向へ向かう動作である場合に、前記動作不許可方向への動作を制限するステップと、
を有する作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械システムおよび作業機械の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
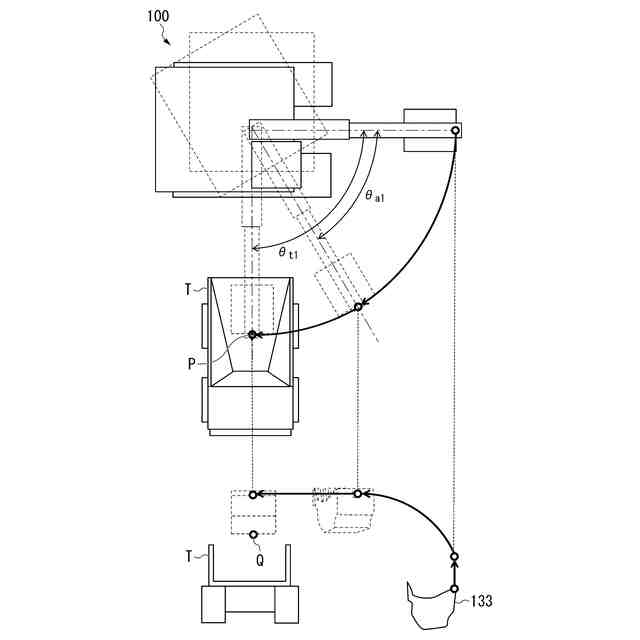
特許文献1には、油圧ショベルを自動運転させる技術が開示されている。特許文献1において、油圧ショベルの制御装置は、油圧ショベルが荷を抱えた状態で運搬車両へ向かって自動旋回する際に、バケットから荷がこぼさないために、バケットの角度が一定になるように制御する。
【先行技術文献】
【特許文献】
【0003】
特開2019-065661号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
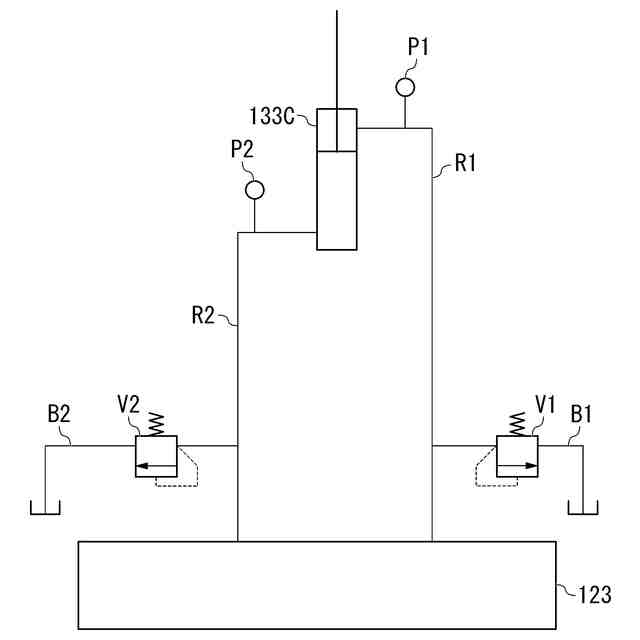
ところで、アクチュエータを有する油圧回路には、回路の内圧の過剰な増加を防ぐためにリリーフバルブが設けられる。リリーフバルブは、回路の内圧がリリーフ圧を超えるときに開いて作動油をオイルタンクへ戻すためのバルブである。
【0005】
特許文献1に示すような自動運転では、作業機の姿勢と目標姿勢との差に基づいて自動操作信号を生成している。そのため、作業機の目標姿勢がアクチュエータの可動域を超えていると、作業機の姿勢が目標姿勢に至らないために、自動操作信号が出力され続ける。これによりアクチュエータがストールし、効率が低下してしまう。
本開示の目的は、アクチュエータのストールによる効率の低下を防ぐことができる作業機械システムおよび作業機械の制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、作業機械システムは、複数の関節と、作業具とを含み本体に対し動作可能な作業機と、前記作業機を駆動するアクチュエータと、前記アクチュエータを制御する制御装置と、を備え、前記制御装置は、前記作業具の目標姿勢に従って前記アクチュエータの動作を指令し、前記アクチュエータの状態が所定条件を満たすときに前記目標姿勢を変更する。
【発明の効果】
【0007】
上記態様によれば、作業機械システムは、アクチュエータのストールによる効率の低下を防ぐことができる。
【図面の簡単な説明】
【0008】
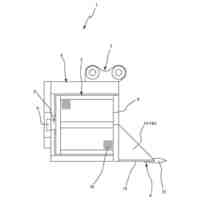
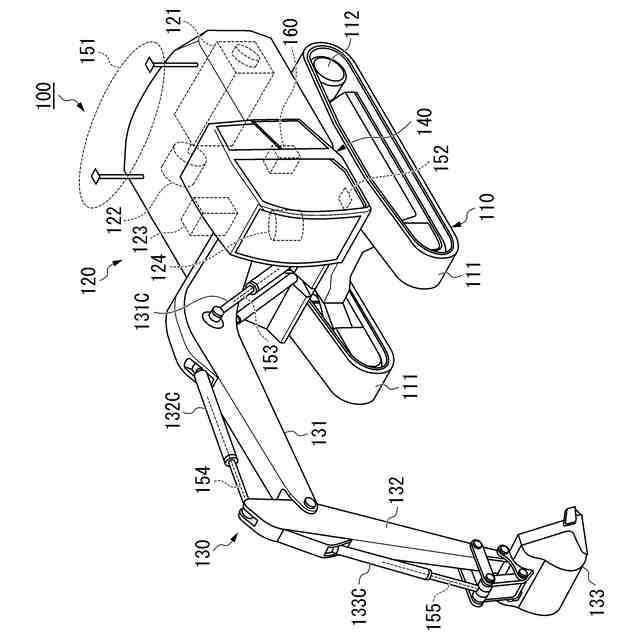
第一実施形態に係る作業機械の構成を示す概略図である。
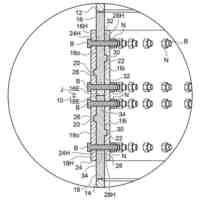
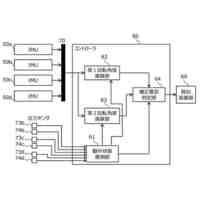
第一実施形態に係るバケットシリンダの油圧回路を示すブロック図である。
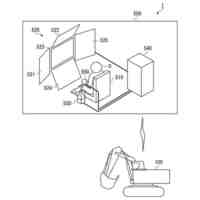
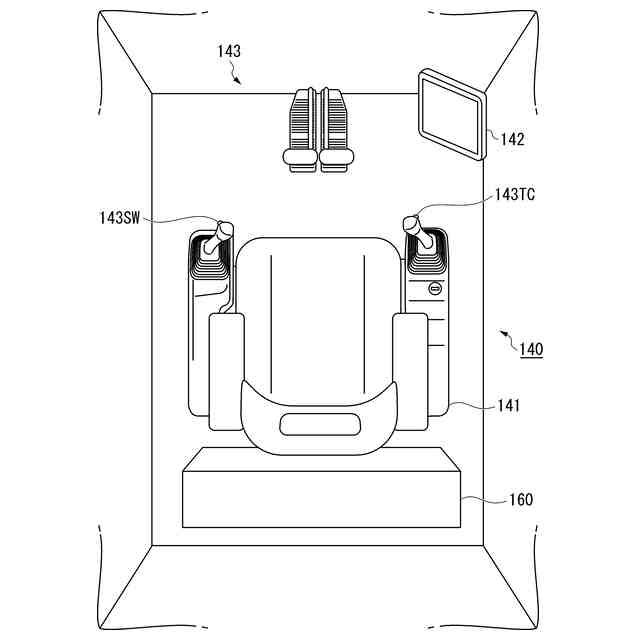
第一実施形態に係る運転室の内部の構成を示す図である。
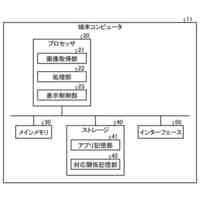
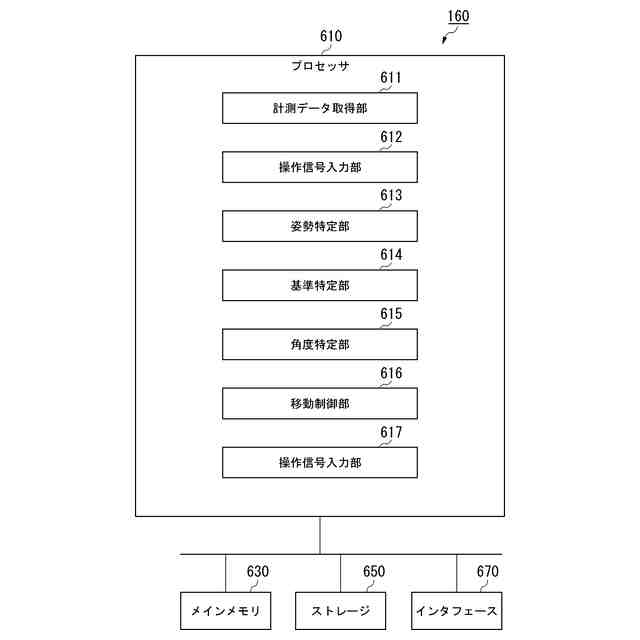
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
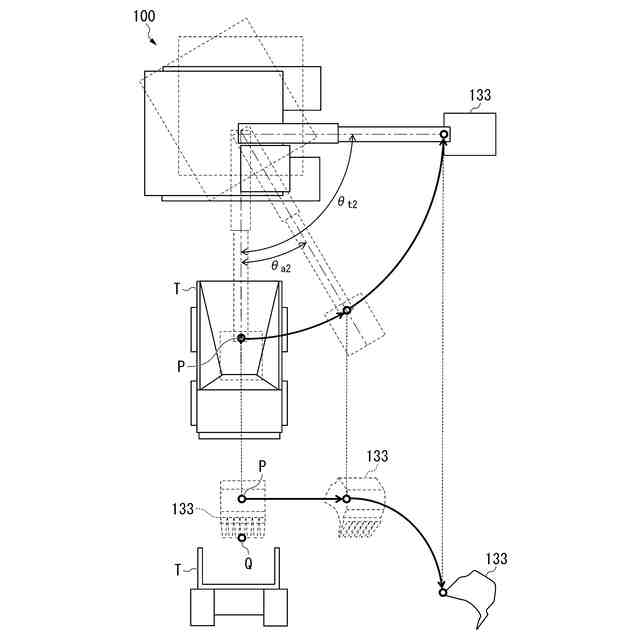
第一実施形態に係る第一旋回における作業機械の動きの例を示す図である。
第一実施形態に係る第二旋回における作業機械の動きの例を示す図である。
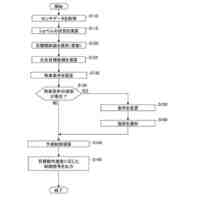
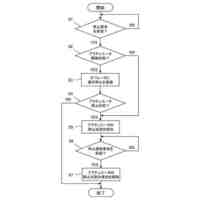
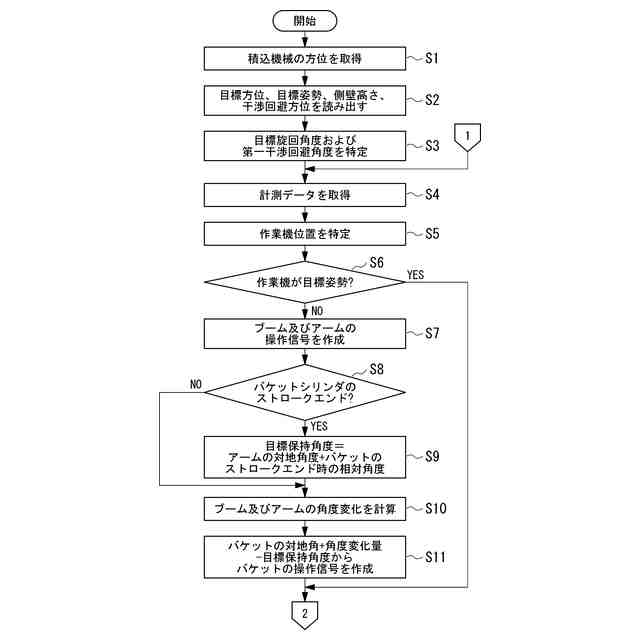
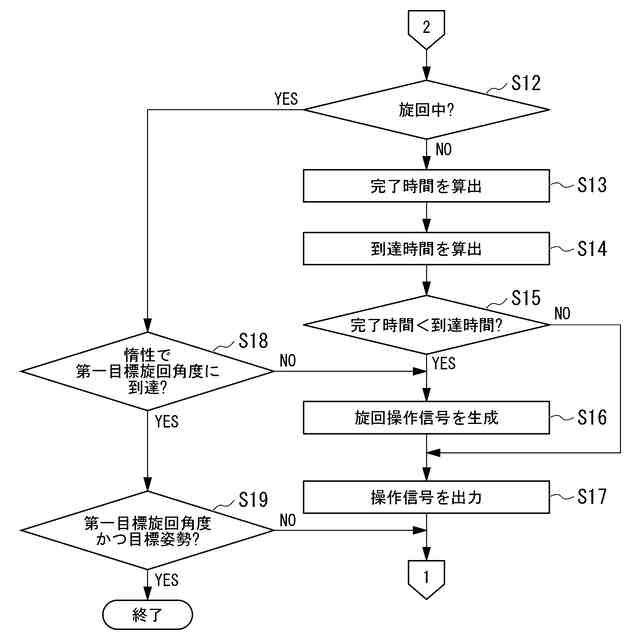
第一実施形態に係る制御装置による第一旋回制御を示すフローチャート(パート1)である。
第一実施形態に係る制御装置による第一旋回制御を示すフローチャート(パート2)である。
【発明を実施するための形態】
【0009】
〈第一実施形態〉
以下、図面を参照しながら実施形態について詳しく説明する。
【0010】
《作業機械100の構成》
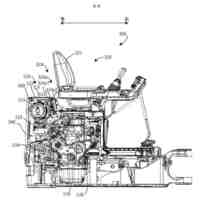
図1は、第一実施形態に係る作業機械100の構成を示す概略図である。
作業機械100は、施工現場にて稼働し、土砂などを掘削し、荷としてダンプトラックなどの積込対象Tのベッセルなど荷台に積み込む。作業機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また作業機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る作業機械100は、バックホウショベルである。作業機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。積込対象Tの例としては、ダンプトラック、ホッパなどが挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
11日前
株式会社小松製作所
磁気結合型リアクトル
11日前
株式会社小松製作所
評価装置および評価方法
6日前
株式会社小松製作所
制御システムおよび制御方法
11日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
11日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
11日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
11日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
12日前
個人
バケット
19日前
個人
建物の不同沈下の修正方法
26日前
千代田工営株式会社
回転貫入杭
1か月前
株式会社富田製作所
継手部構造
19日前
株式会社大林組
操縦装置
22日前
株式会社熊谷組
山留壁用親杭
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
12日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
11日前
FKS株式会社
擁壁及び擁壁の築造方法
21日前
株式会社三誠
建物の免震構造
26日前
鹿島建設株式会社
接続方法および接続構造
1か月前
ライト工業株式会社
鉄筋保持用治具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ