TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152545
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054477
出願日
2024-03-28
発明の名称
作業機械、作業機械を含むシステム、および作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
3/43 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】容器に積み込まれた荷の姿を整える。
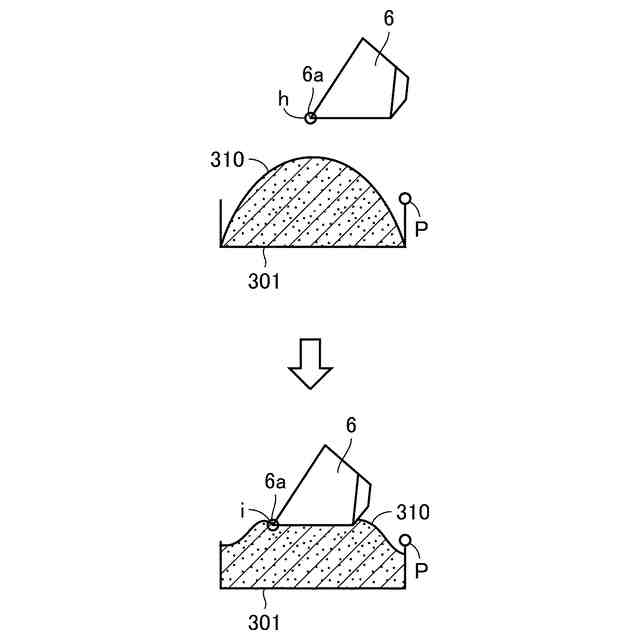
【解決手段】作業機は、先端にバケット6を有している。作業機アクチュエータは、作業機を駆動する。コントローラは、ベッセル301への荷310の積込作業が終了した後に、作業機アクチュエータを動作させて、ベッセル301の上方でバケット6を荷310に当たるまで下げる。
【選択図】図11
特許請求の範囲
【請求項1】
先端にアタッチメントを有する作業機と、
前記作業機を駆動する作業機アクチュエータと、
容器への荷の積込作業が終了した後に、前記作業機アクチュエータを動作させて前記容器の上方で前記アタッチメントを前記荷に当たるまで下げる、コントローラと、を備える、作業機械。
続きを表示(約 910 文字)
【請求項2】
前記コントローラは、前記アタッチメントの姿勢を保ちながら前記アタッチメントを下げる、請求項1に記載の作業機械。
【請求項3】
前記アタッチメントは、底面を有するバケットであり、
前記コントローラは、前記底面を地面と平行に保ちながら前記バケットを下げる、請求項2に記載の作業機械。
【請求項4】
前記コントローラは、前記アタッチメントを下げる動作を終了した後に、前記アタッチメントを上げる、請求項1に記載の作業機械。
【請求項5】
走行体をさらに備え、
前記コントローラは、前記走行体を前記容器から離す前記走行体の走行と、前記アタッチメントを上げる動作とを同時に行う、請求項4に記載の作業機械。
【請求項6】
前記コントローラは、前記走行体を停止させた状態で前記アタッチメントを上げる動作をした後に、前記走行体の走行と前記アタッチメントを上げる動作とを同時に行う、請求項5に記載の作業機械。
【請求項7】
走行体をさらに備え、
前記コントローラは、前記積込作業中に、前記走行体を前記容器から離す前記走行体の走行をする、請求項1に記載の作業機械。
【請求項8】
前記容器の上方で前記アタッチメントを最も下げた状態で、前記作業機械の前後方向における前記容器の中心の真上に、前記アタッチメントが配置される、請求項1に記載の作業機械。
【請求項9】
先端にアタッチメントを有する作業機と、
前記作業機を駆動する作業機アクチュエータと、
容器への荷の積込作業が終了した後に、前記作業機アクチュエータを動作させて前記容器の上方で前記アタッチメントを前記荷に当たるまで下げる、コントローラと、を備える、作業機械を含むシステム。
【請求項10】
容器に荷を積み込むことと、
前記容器への前記荷の積み込みが終了した後に、前記容器の上方で、作業機械の作業機の先端のアタッチメントを前記荷に当たるまで下げることと、を備える、作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、作業機械を含むシステム、および作業機械の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
国際公開第2016/152994号(特許文献1)には、ホイールローダの移動距離に応じて求められた目標位置にブームおよびバケットを移動させる制御が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/152994号
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械は、ダンプトラックのベッセルなどの容器に荷の積込みを行う。積み込まれた荷の積込状態(荷姿)が不適切であると、ダンプトラックの走行中に荷がこぼれるおそれがある。
【0005】
本開示では、容器に積み込まれた荷の姿を整えることができる、作業機械、作業機械を含むシステム、および作業機械の制御方法が提案される。
【課題を解決するための手段】
【0006】
本開示のある局面に係る作業機械および作業機械を含むシステムの各々は、作業機と、作業機アクチュエータと、コントローラとを備えている。作業機は、先端にアタッチメントを有している。作業機アクチュエータは、作業機を駆動する。コントローラは、容器への荷の積込作業が終了した後に、作業機アクチュエータを動作させて容器の上方でアタッチメントを荷に当たるまで下げる。
【0007】
本開示のある局面に係る作業機械の制御方法は、以下のステップを備えている。第1のステップは、容器に荷を積み込むこととである。第2のステップは、容器への荷の積み込みが終了した後に、容器の上方で、作業機械の作業機の先端のアタッチメントを荷に当たるまで下げることである。
【発明の効果】
【0008】
本開示の作業機械、作業機械を含むシステム、および作業機械の制御方法によると、容器に積み込まれた荷の姿を整えることができる。
【図面の簡単な説明】
【0009】
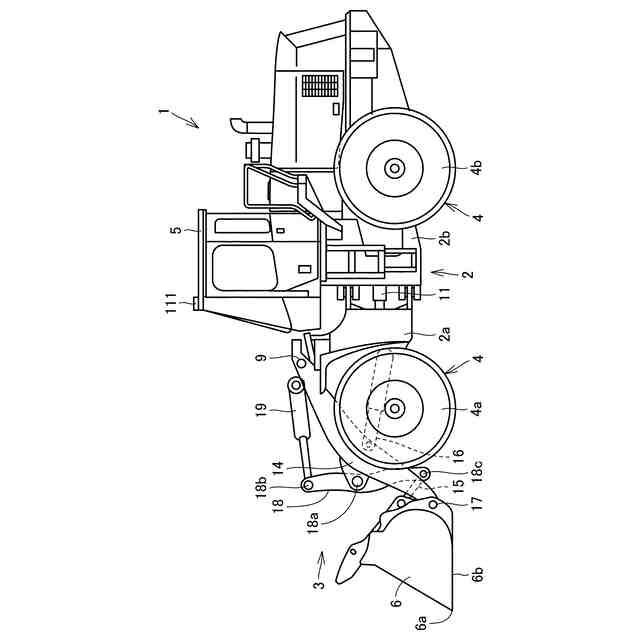
作業機械の一例としてのホイールローダの側面図である。
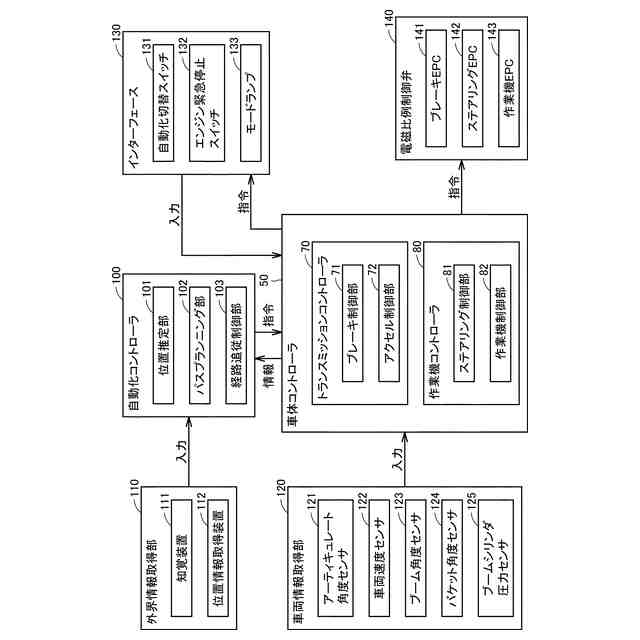
ホイールローダの制御システムの概略構成を示すブロック図である。
掘削積込作業を行うホイールローダの平面図である。
ホイールローダの自動制御システムの構成を示すブロック図である。
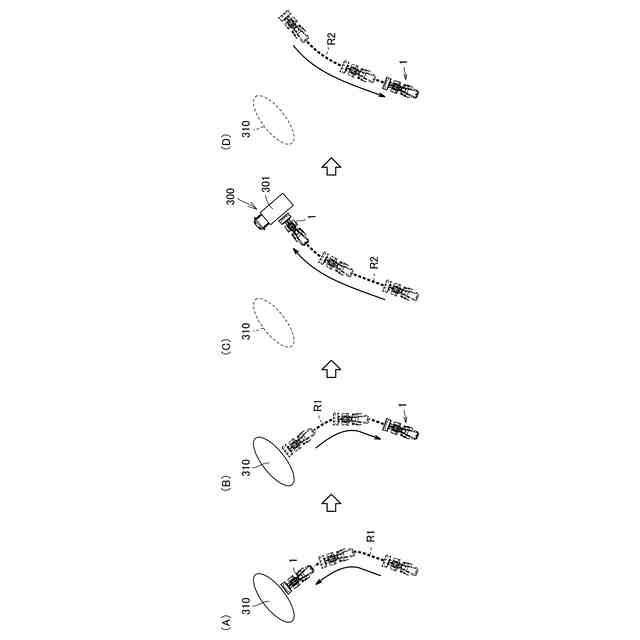
自動制御によりバケットに積載した荷を積込目標に積み込む動作の流れを示すフローチャートである。
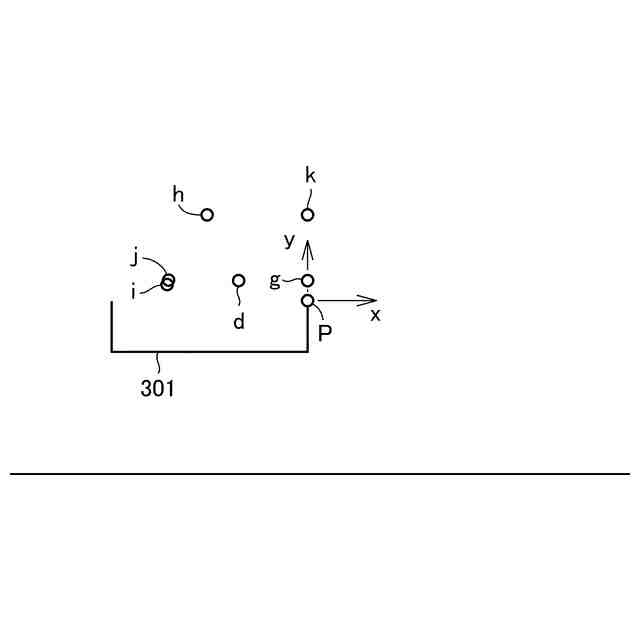
ベッセルに対する目標位置の配置を示す模式図である。
刃先が目標位置dにあるホイールローダを模式的に示す図である。
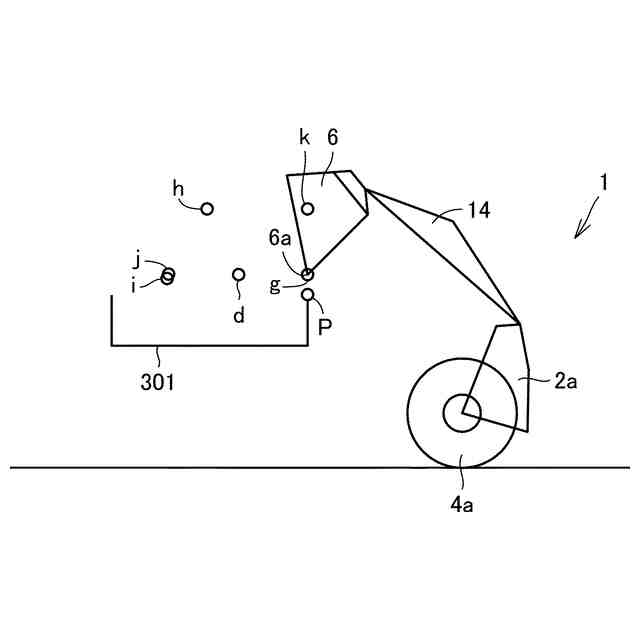
刃先が目標位置gにあるホイールローダを模式的に示す図である。
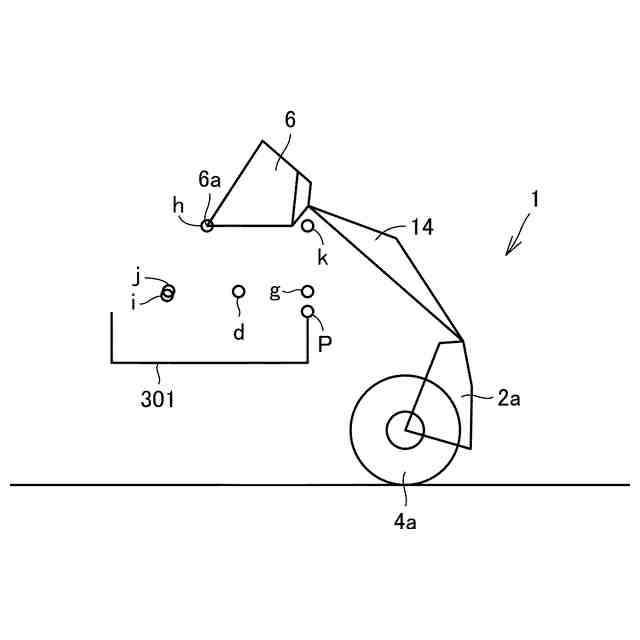
刃先が目標位置hにあるホイールローダを模式的に示す図である。
刃先が目標位置iにあるホイールローダを模式的に示す図である。
荷押しによるベッセル内の荷の姿の変化を示す図である。
刃先が目標位置jにあるホイールローダを模式的に示す図である。
刃先が目標位置kにあるホイールローダを模式的に示す図である。
積込作業中のシリンダ長さの変化を示すグラフである。
積込み終了時の作業機の動作の変形例を示す第1の図である。
積込み終了時の作業機の動作の変形例を示す第2の図である。
【発明を実施するための形態】
【0010】
以下、実施形態について図に基づいて説明する。以下の説明では、同一の部品および構成要素には同一の符号を付してある。それらの名称および機能も同じである。したがって、これらについての詳細な説明は繰り返さない。図面では、説明の便宜上、構成を省略または簡略化している場合もある。実施形態から任意の構成が抽出され、それらが任意に組み合わされることも、当初から予定されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ