TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140108
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039287
出願日
2024-03-13
発明の名称
作業機械を制御するためのシステム、方法、及び作業機械
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/20 20060101AFI20250919BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機の姿勢を考慮した適切な位置に目標経路を生成することで作業効率を向上させる。
【解決手段】作業機械は、車体と、車体に対して動作可能に取り付けられる作業機とを含む。システムは、姿勢センサとコントローラとを備える。姿勢センサは、作業機の姿勢を検出する。コントローラは、車体の進行方向に延びる第1目標経路を取得する。コントローラは、作業機の幅を取得する。コントローラは、作業機の姿勢を取得する。コントローラは、作業機の幅と作業機の姿勢とに基づいて、オフセット幅を決定する。コントローラは、第1目標経路とオフセット幅とに基づいて、第1目標経路に隣接する第2目標経路を生成する。
【選択図】図8
特許請求の範囲
【請求項1】
車体と、前記車体に対して動作可能に取り付けられる作業機とを含む作業機械を制御するためのシステムであって、
前記作業機の姿勢を検出する姿勢センサと、
コントローラと、
を備え、
前記コントローラは、
前記車体の進行方向に延びる第1目標経路を取得し、
前記作業機の幅を取得し、
前記作業機の姿勢を取得し、
前記作業機の幅と前記作業機の姿勢とに基づいて、オフセット幅を決定し、
前記第1目標経路と前記オフセット幅とに基づいて、前記第1目標経路に隣接する第2目標経路を生成する、
システム。
続きを表示(約 1,400 文字)
【請求項2】
前記コントローラは、前記第1目標経路を、前記車体の幅方向に、前記オフセット幅変位させて、前記第2目標経路を生成する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、
前記作業機の姿勢として、前記車体の幅方向に対する前記作業機の傾斜角度を示すアングル角を取得し、
前記アングル角に基づいて、前記車体の幅方向における前記作業機の幅のベクトル成分の大きさを、前記作業機の第1投影長さとして算出し、
前記作業機の第1投影長さに基づいて、前記オフセット幅を決定する、
請求項1に記載のシステム。
【請求項4】
前記コントローラは、
前記作業機の姿勢として、水平方向に対する前記作業機の傾斜角度を示すチルト角を取得し、
前記チルト角に基づいて、水平方向における前記作業機の幅のベクトル成分の大きさを、前記作業機の第2投影長さとして算出し、
前記作業機の第2投影長さに基づいて、前記オフセット幅を決定する、
請求項1に記載のシステム。
【請求項5】
前記作業機械の現在位置を検出する位置センサをさらに備え、
前記コントローラは、
前記作業機械の現在位置を取得し、
前記作業機械の位置と前記第2目標経路とに基づいて、前記作業機械が前記第2目標経路に追従するように、前記作業機械を自動制御する、
請求項1に記載のシステム。
【請求項6】
前記コントローラは、
前記作業機械の所定部分の位置を前記作業機械の現在位置として取得し、
前記所定部分が前記第2目標経路に追従するように、前記作業機械を自動制御する、
請求項5に記載のシステム。
【請求項7】
前記第2目標経路は、前記進行方向に延び、前記車体の幅方向において前記第1目標経路に隣接する、
請求項1に記載のシステム。
【請求項8】
車体と、前記車体に対して動作可能に取り付けられる作業機とを含む作業機械を制御するための方法であって、
前記車体の進行方向に延びる第1目標経路を取得することと、
前記作業機の幅を取得することと、
前記作業機の姿勢を取得することと、
前記作業機の幅と前記作業機の姿勢とに基づいて、オフセット幅を決定することと、
前記第1目標経路と前記オフセット幅とに基づいて、前記第1目標経路に隣接する第2目標経路を生成すること、
を備える方法。
【請求項9】
前記第1目標経路を、前記車体の幅方向に、前記オフセット幅変位させて、前記第2目標経路を生成することを備える、
請求項8に記載の方法。
【請求項10】
前記作業機の姿勢として、前記車体の幅方向に対する前記作業機の傾斜角度を示すアングル角を取得することと、
前記アングル角に基づいて、前記車体の幅方向における前記作業機の幅のベクトル成分の大きさを、前記作業機の第1投影長さとして算出することと、
前記作業機の第1投影長さに基づいて、前記オフセット幅を決定すること、
を備える請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を制御するためのシステム、方法、及び作業機械に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
作業機械が目標経路に従って走行するように自動制御する制御システムが知られている。例えば、特許文献1では、制御システムのコントローラは、作業機械の幅方向に並ぶ複数の目標経路を生成する。コントローラは、各目標経路に従って走行するように作業機械を自動制御する。また、この制御システムでは、コントローラは、作業機械のブレードの幅に基づいて、隣り合う目標経路の間隔を決定する
【先行技術文献】
【特許文献】
【0003】
特開2020-166303号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ブレードなどの作業機は、作業機械の車体に動作可能に取り付けられている。従って、車体に対する作業機の姿勢は変化する。そのため、作業機は、車体の幅方向と常に平行であるとは限らず、車体の幅方向に対して傾斜している場合がある。その場合、作業機の幅に基づいて、隣り合う目標経路の間隔が決定されると、目標経路の間隔が大きくなり過ぎるなど、適切な位置に目標経路を生成することは困難である。本開示の目的は、作業機の姿勢を考慮した適切な位置に目標経路を生成することで作業効率を向上させることにある。
【課題を解決するための手段】
【0005】
本開示の第1の態様に係るシステムは、作業機械を制御するためのシステムである。作業機械は、車体と、車体に対して動作可能に取り付けられる作業機とを含む。当該システムは、姿勢センサとコントローラとを備える。姿勢センサは、作業機の姿勢を検出する。コントローラは、車体の進行方向に延びる第1目標経路を取得する。コントローラは、作業機の幅を取得する。コントローラは、作業機の姿勢を取得する。コントローラは、作業機の幅と作業機の姿勢とに基づいて、オフセット幅を決定する。コントローラは、第1目標経路とオフセット幅とに基づいて、第1目標経路に隣接する第2目標経路を生成する。
【0006】
本開示の第2の態様に係る方法は、作業機械を制御するための方法である。作業機械は、車体と、車体に対して動作可能に取り付けられる作業機とを含む。当該方法は、車体の進行方向に延びる第1目標経路を取得することと、作業機の幅を取得することと、作業機の姿勢を取得することと、作業機の幅と作業機の姿勢とに基づいて、オフセット幅を決定することと、第1目標経路とオフセット幅とに基づいて、第1目標経路に隣接する第2目標経路を生成すること、を備える。
【0007】
本開示の第3の態様に係る作業機械は、車体と、作業機と、姿勢センサと、コントローラとを備える。作業機は、車体に対して動作可能に取り付けられる。姿勢センサは、作業機の姿勢を検出する。コントローラは、車体の進行方向に延びる第1目標経路を取得する。コントローラは、作業機の幅を取得する。コントローラは、作業機の姿勢を取得する。コントローラは、作業機の幅と作業機の姿勢とに基づいて、オフセット幅を決定する。コントローラは、第1目標経路とオフセット幅とに基づいて、第1目標経路に隣接する第2目標経路を生成する。
【発明の効果】
【0008】
本開示によれば、作業機の姿勢を考慮した適切な位置に目標走行経路を生成することで、作業効率が向上する。
【図面の簡単な説明】
【0009】
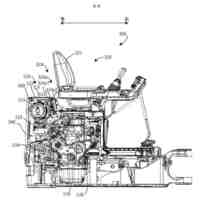
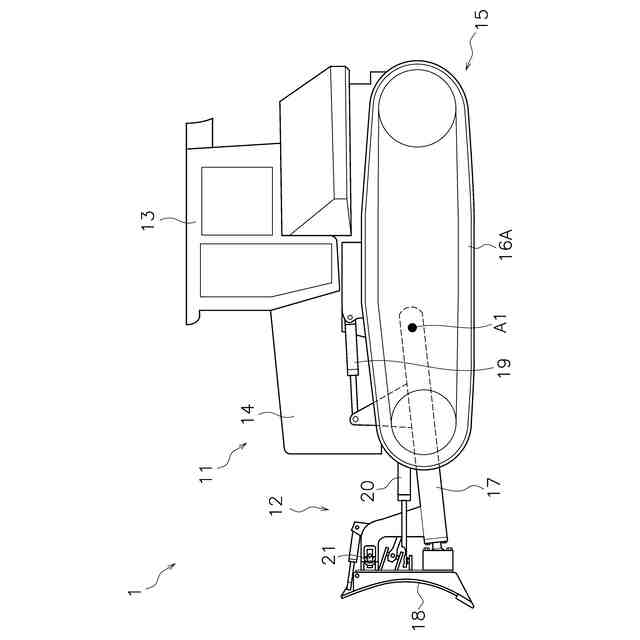
実施形態に係る作業機械を示す側面図である。
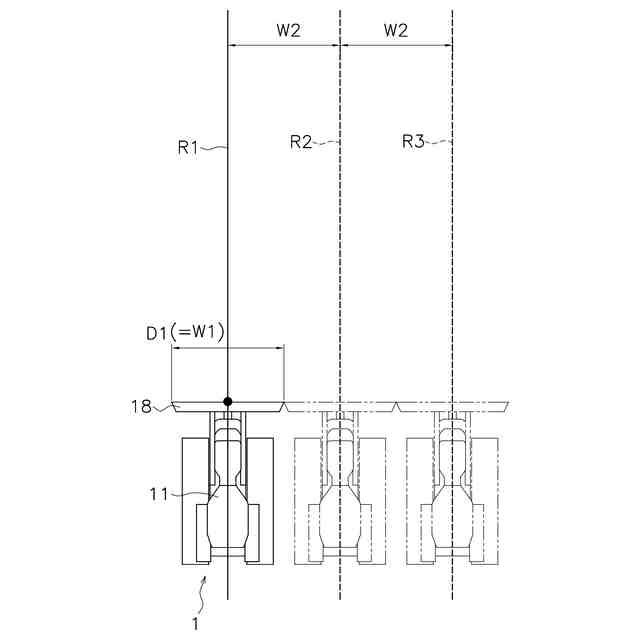
作業機械の上面図である。
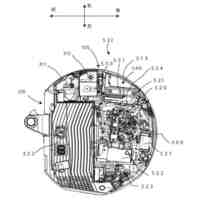
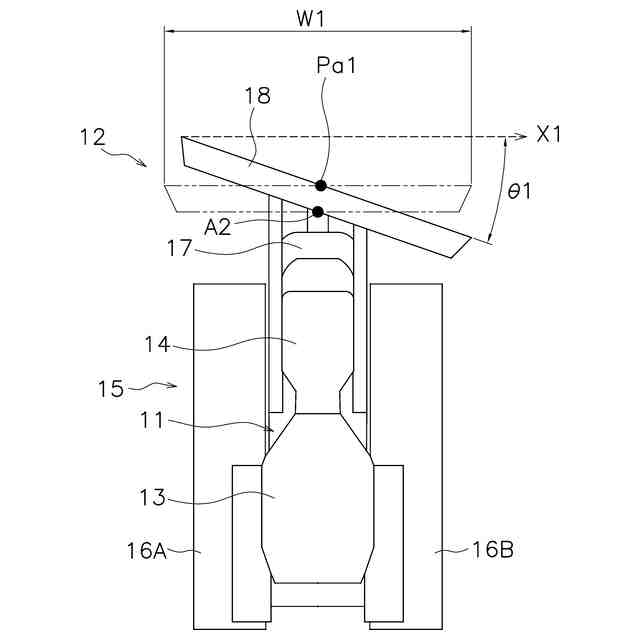
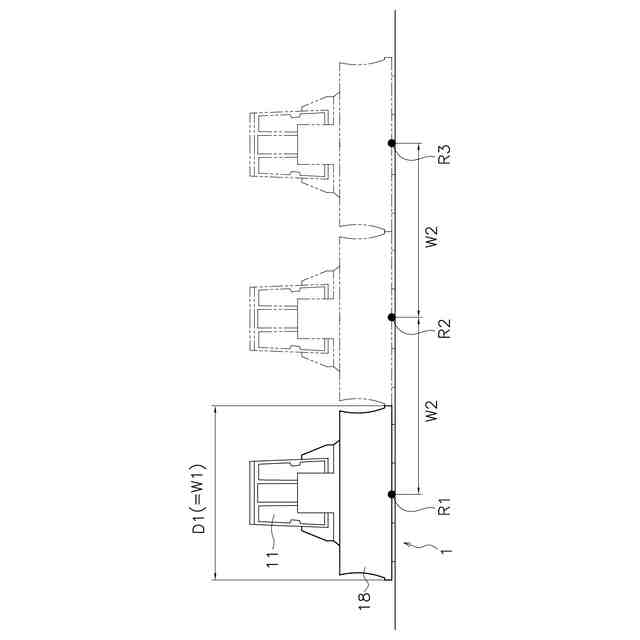
作業機械の正面図である。
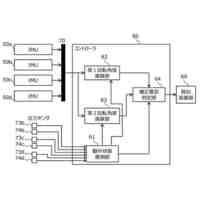
作業機械の駆動系と制御システムとの構成を示すブロック図である。
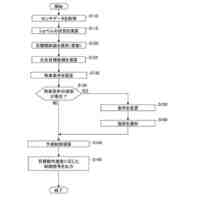
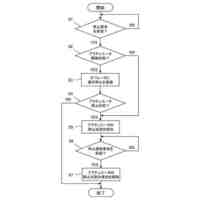
自動走行制御の処理を示すフローチャートである。
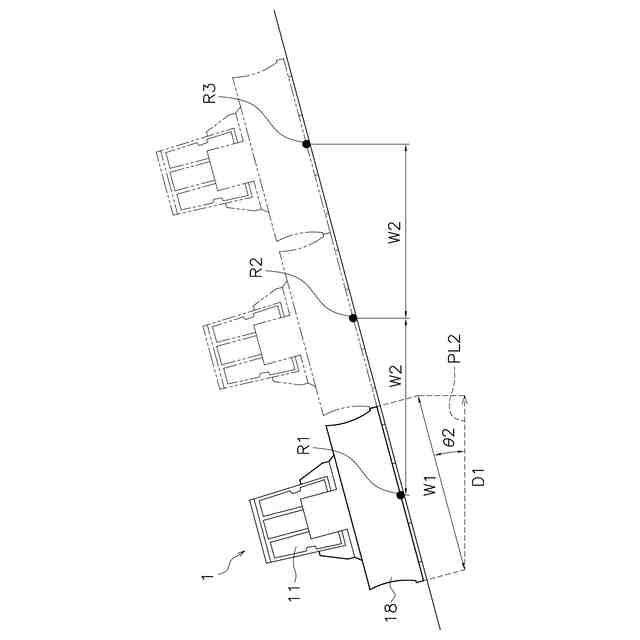
目標経路を生成するための処理を示す図である。
目標経路を生成するための処理を示す図である。
目標経路を生成するための処理を示す図である。
目標経路を生成するための処理を示す図である。
目標経路を生成するための処理を示す図である。
目標経路を生成するための処理を示す図である。
目標走行経路に従って走行する作業機械の一例を示す図である。
目標走行経路に従って走行する作業機械の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、実施形態に係る作業機械について、図面を参照しながら説明する。図1は、実施形態に係る作業機械1を示す側面図である。本実施形態に係る作業機械1は、ブルドーザである。作業機械1は、車体11と作業機12とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
10日前
株式会社小松製作所
磁気結合型リアクトル
10日前
株式会社小松製作所
評価装置および評価方法
5日前
株式会社小松製作所
制御システムおよび制御方法
10日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
10日前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
10日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
10日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
10日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
10日前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
11日前
個人
バケット
18日前
個人
建物の不同沈下の修正方法
25日前
千代田工営株式会社
回転貫入杭
1か月前
株式会社大林組
操縦装置
21日前
株式会社富田製作所
継手部構造
18日前
株式会社熊谷組
山留壁用親杭
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
11日前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
1か月前
FKS株式会社
擁壁及び擁壁の築造方法
20日前
鹿島建設株式会社
接続方法および接続構造
1か月前
カナデビア株式会社
サクション基礎
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
26日前
ライト工業株式会社
鉄筋保持用治具
1か月前
株式会社三誠
建物の免震構造
25日前
株式会社竹内製作所
作業用車両
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ