TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132254
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029681
出願日
2024-02-29
発明の名称
作業現場の管理システム及び作業現場の管理方法
出願人
株式会社小松製作所
,
国立大学法人横浜国立大学
代理人
弁理士法人酒井国際特許事務所
主分類
E01H
3/02 20060101AFI20250903BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】作業エリアに設定された目標散水エリアに効率良く散水すること。
【解決手段】作業現場の管理システムは、運搬車両が走行可能な作業現場の作業エリアに目標散水エリアを設定する目標散水エリア設定部と、無人散水車両の散水に係る散水評価項目を含む評価関数を演算して、評価関数の評価値の度合いが良くなるように、目標散水エリアにおける無人散水車両の目標軌道を示す散水パスを生成する散水データ生成部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
運搬車両が走行可能な作業現場の作業エリアに目標散水エリアを設定する目標散水エリア設定部と、
無人散水車両の散水に係る散水評価項目を含む評価関数を演算して、前記評価関数の評価値の度合いが良くなるように、前記目標散水エリアにおける前記無人散水車両の目標軌道を示す散水パスを生成する散水データ生成部と、を備える、
作業現場の管理システム。
続きを表示(約 1,500 文字)
【請求項2】
前記散水評価項目は、前記目標散水エリアにおいて散水されない未散水エリアの面積が小さいほど前記評価値の度合いが良くなる評価項目を含む、
請求項1に記載の作業現場の管理システム。
【請求項3】
前記散水評価項目は、前記目標散水エリアにおいて少なくとも2回散水された重複エリアの面積が小さいほど前記評価値の度合いが良くなる評価項目を含む、
請求項1に記載の作業現場の管理システム。
【請求項4】
前記散水評価項目は、前記目標散水エリアの外側において散水された逸脱散水エリアの面積が小さいほど前記評価値の度合いが良くなる評価項目を含む、
請求項1に記載の作業現場の管理システム。
【請求項5】
前記評価関数は、前記目標軌道の形状に係る形状評価項目を含み、
前記形状評価項目は、前記目標軌道の曲率が前記無人散水車両の最大曲率以下であって小さいほど前記評価値の度合いが良くなる評価項目、前記目標軌道の曲率変化率が前記無人散水車両の最大曲率変化率以下であって小さいほど前記評価値の度合いが良くなる評価項目、及び前記目標軌道の長さが短いほど前記評価値の度合いが良くなる評価項目の少なくとも一つを含む、
請求項1に記載の作業現場の管理システム。
【請求項6】
前記評価関数は、前記目標軌道の終点に係る終点評価項目を含み、
前記終点評価項目は、前記目標軌道の終点における前記無人散水車両の方位が前記作業エリアの出口を向いているほど前記評価値の度合いが良くなる評価項目、及び前記目標軌道の終点における前記無人散水車両の位置が前記作業エリアの出口に近いほど前記評価値の度合いが良くなる評価項目の少なくとも一つを含む、
請求項1に記載の作業現場の管理システム。
【請求項7】
前記評価関数は、前記無人散水車両が前記作業エリアから逸脱した面積と前記無人散水車両が障害物に重複した面積との和を示す走行不可エリアの面積が小さいほど前記評価値の度合いが良くなる走行不可エリア面積評価項目を含む、
請求項1に記載の作業現場の管理システム。
【請求項8】
前記評価関数は、前記無人散水車両が前記作業エリアから逸脱した面積と前記無人散水車両が障害物に重複した面積との和を示す走行不可エリアの面積が小さいほど前記評価値の度合いが良くなる走行不可エリア面積評価項目を含み、
前記散水データ生成部は、前記散水評価項目及び前記形状評価項目を含まず前記走行不可エリア面積評価項目を含む前記評価関数を演算して前記走行不可エリアの面積がゼロになる前記散水パスの解を最適化した後、前記散水評価項目及び前記形状評価項目を含む前記評価関数の度合いが良くなる前記散水パスの解を最適化する、
請求項5に記載の作業現場の管理システム。
【請求項9】
前記散水データ生成部は、前記目標散水エリアを複数の分割エリアに分割し、複数の前記分割エリアのそれぞれにおいて前記散水パスを生成する、
請求項1に記載の作業現場の管理システム。
【請求項10】
運搬車両が走行可能な作業現場の作業エリアに目標散水エリアを設定することと、
無人散水車両の散水に係る散水評価項目を含む評価関数を演算して、前記評価関数の評価値の度合いが良くなるように、前記目標散水エリアにおける前記無人散水車両の目標軌道を示す散水パスを生成することと、を含む、
作業現場の管理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業現場の管理システム及び作業現場の管理方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
作業現場の管理システムに係る技術分野において、特許文献1に開示されているような、無人散水車両の散水パスを生成する作業現場の管理システムが知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/209192号
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業現場は、積込エリア及び排土エリアの少なくとも一方を含む作業エリアを有する。作業エリアに散水されることにより、作業エリアにおいて粉塵又は砂埃が拡散することが抑制される。作業エリアに設定された目標散水エリアに効率良く散水できる技術が要望される。
【0005】
本開示は、作業エリアに設定された目標散水エリアに効率良く散水することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、運搬車両が走行可能な作業現場の作業エリアに目標散水エリアを設定する目標散水エリア設定部と、無人散水車両の散水に係る散水評価項目を含む評価関数を演算して、評価関数の評価値の度合いが良くなるように、目標散水エリアにおける無人散水車両の目標軌道を示す散水パスを生成する散水パス生成部と、を備える、作業現場の管理システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業エリアに設定された目標散水エリアに効率良く散水することができる。
【図面の簡単な説明】
【0008】
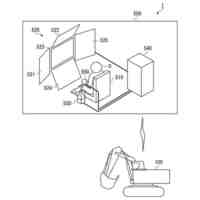
図1は、実施形態に係る作業現場を示す模式図である。
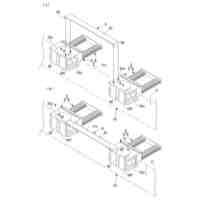
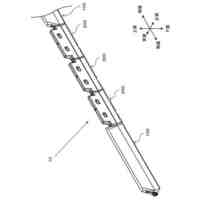
図2は、実施形態に係る無人散水車両を示す斜視図である。
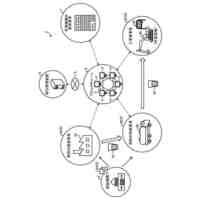
図3は、実施形態に係る作業現場の管理システムを示す模式図である。
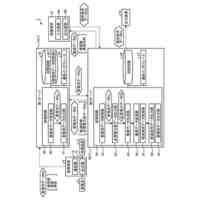
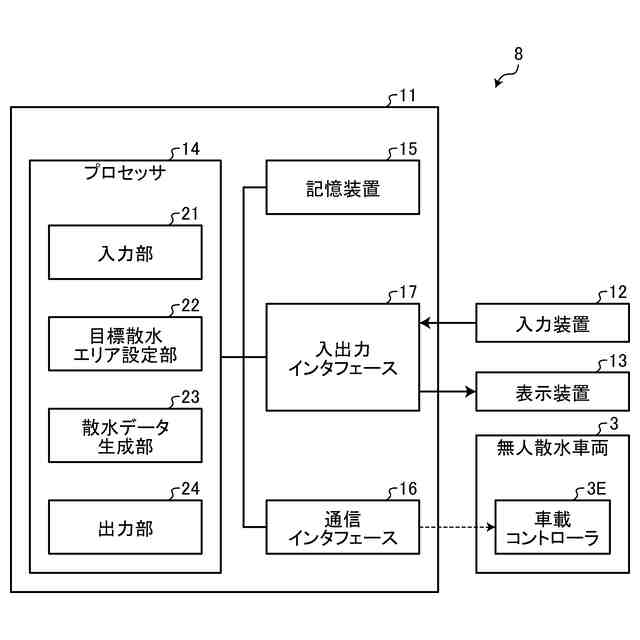
図4は、実施形態に係る管理装置を示すブロック図である。
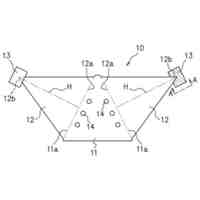
図5は、実施形態に係る目標散水エリア及び散水データを説明するための模式図である。
図6は、実施形態に係る散水パスを説明するための図である。
図7は、実施形態に係る重み値の優先順位を説明するための図である。
図8は、実施形態に係る軌道セグメントを説明するための図である。
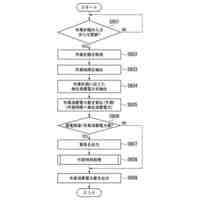
図9は、実施形態に係る散水パスの生成方法を示すフローチャートである。
図10は、実施形態に係る第1処理を説明するための模式図である。
図11は、実施形態に係る散水パスの生成方法により生成された散水パスの一例を示す図である。
図12は、実施形態に係る散水パスの生成方法を説明するための図である。
図13は、実施形態に係る散水パスの生成方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[作業現場]
図1は、実施形態に係る作業現場1を示す模式図である。実施形態において、作業現場1は、鉱山である。鉱山とは、鉱物を採掘する場所又は事業所をいう。鉱山として、金属を採掘する金属鉱山、石灰石を採掘する非金属鉱山、又は石炭を採掘する石炭鉱山が例示される。作業現場1において、複数の無人車両が稼働する。無人車両とは、運転者の運転操作によらずに無人で稼働する作業車両をいう。実施形態において、作業現場1において稼働する無人車両は、無人運搬車両2と無人散水車両3とを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
多段変速機
2日前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
磁気結合型リアクトル
1か月前
株式会社小松製作所
評価装置および評価方法
25日前
株式会社小松製作所
制御システムおよび制御方法
1か月前
株式会社小松製作所
作業機械および作業機械の制御方法
17日前
株式会社小松製作所
作業機械および作業機械の制御方法
17日前
株式会社小松製作所
管理システム、管理装置、及び管理方法
9日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
1か月前
株式会社小松製作所
作業機械及び作業機械を制御するための方法
2日前
株式会社小松製作所
作業車両の制御装置および作業車両の制御方法
9日前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
1か月前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
1か月前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
1か月前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
作業機械の遠隔操作システムおよび作業機械の遠隔操作方法
3日前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
1か月前
株式会社小松製作所
管理システム及び管理方法
17日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
17日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
17日前
株式会社小松製作所
消費電力予測装置、作業機械、消費電力予測システム、消費電力予測方法、およびプログラム
10日前
株式会社熊谷組
床版
4日前
積水樹脂株式会社
カバー体
2日前
個人
掃除装置
2日前
株式会社セイトク
防雪パネル
1か月前
株式会社パロマ
融雪装置
9日前
コスモテック株式会社
表示装置
1か月前
株式会社 林物産発明研究所
道路安全体
17日前
戸田建設株式会社
コンクリート構造
1か月前
桑名金属工業株式会社
融雪マットおよび融雪方法
1か月前
戸田建設株式会社
鋼製ブラケットの取付装置
1か月前
戸田建設株式会社
鋼製ブラケットの取付装置
1か月前
西松建設株式会社
耐震補強方法
9日前
株式会社丸治コンクリート工業所
防護柵
11日前
株式会社川金コアテック
橋梁用鋼弾塑性ダンパー
25日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ