TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128756
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025645
出願日
2024-02-22
発明の名称
作業機械を制御するためのシステム及び方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/20 20060101AFI20250827BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械が目標線に到達したときに作業機械の方位を目標線と平行にするためのオペレータの負担を軽減する。
【解決手段】システムは、コントローラを備える。コントローラは、作業機によって施工される地形上において延びる目標線を取得する。コントローラは、作業機械の現在位置を取得する。コントローラは、作業機械の方位を取得する。コントローラは、目標線と作業機械との方位偏差を取得する。コントローラは、作業機械の現在位置と目標線との間の距離を位置偏差として取得する。コントローラは、方位偏差が角度閾値より大きいかを判定する。コントローラは、方位偏差が角度閾値より大きい場合には、第1操舵制御により、作業機械を制御する。コントローラは、第1操舵制御において、方位偏差と位置偏差とに基づいて作業機械の旋回半径を決定し、旋回半径に基づいて作業機械を自動操舵する。
【選択図】図8
特許請求の範囲
【請求項1】
作業機を含む作業機械を制御するためのシステムであって、
コントローラを備え、
前記コントローラは、
前記作業機によって施工される地形上において延びる目標線を取得し、
前記作業機械の現在位置を取得し、
前記作業機械の方位を取得し、
前記目標線と前記作業機械との方位偏差を取得し、
前記作業機械の現在位置と前記目標線との間の距離を位置偏差として取得し、
前記方位偏差が角度閾値より大きいかを判定し、
前記方位偏差が前記角度閾値より大きい場合には、前記方位偏差と前記位置偏差とに基づいて前記作業機械の旋回半径を決定し、前記旋回半径に基づいて前記作業機械を自動操舵する第1操舵制御により、前記作業機械を制御する、
システム。
続きを表示(約 1,300 文字)
【請求項2】
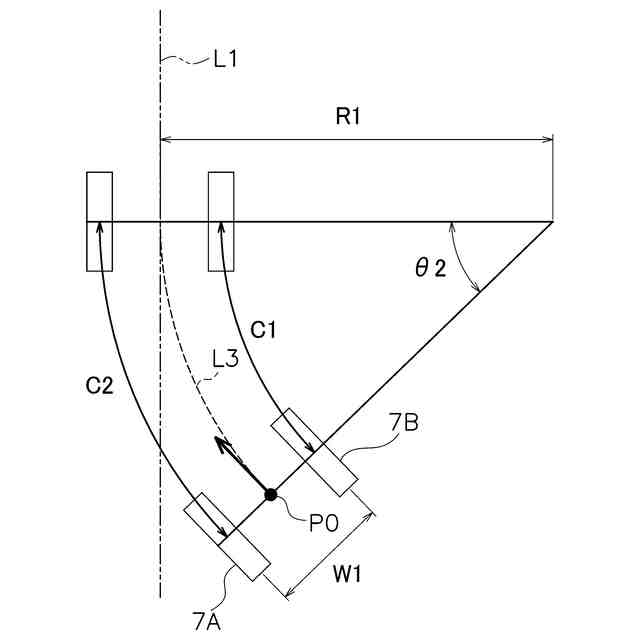
前記コントローラは、前記作業機械の現在位置から前記目標線に向かって延び、前記目標線に接する円弧の半径を、前記旋回半径として決定する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、前記方位偏差が前記角度閾値より小さい場合には、前記方位偏差が大きくなるように前記作業機械を自動操舵する第2操舵制御により、前記作業機械を制御する、
請求項1に記載のシステム。
【請求項4】
前記コントローラは、前記第2操舵制御において、前記方位偏差の絶対値が小さいほど、前記作業機械を緩やかに旋回させる、
請求項3に記載のシステム。
【請求項5】
前記作業機械は、左走行装置と右走行装置と含み、
前記コントローラは、
前記作業機械の旋回時において、前記左走行装置と前記右走行装置とのうち内側の走行装置を外側の走行装置よりも減速させることで、前記作業機械を旋回させ、
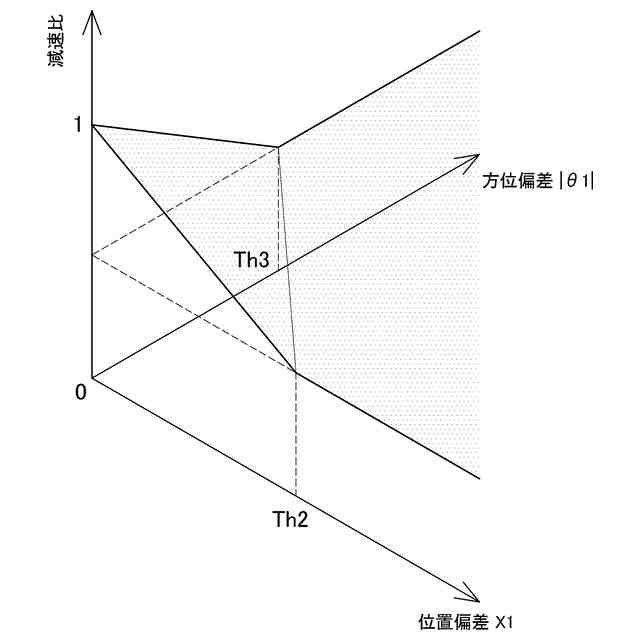
前記第2操舵制御において、前記方位偏差の絶対値が小さいほど、前記外側の走行装置に対する前記内側の走行装置の減速比を大きくする、
請求項4に記載のシステム。
【請求項6】
前記コントローラは、
前記第2操舵制御において、前記位置偏差が小さいほど、前記作業機械を緩やかに旋回させる、
請求項3に記載のシステム。
【請求項7】
前記作業機械は、左走行装置と右走行装置と含み、
前記コントローラは、
前記作業機械の旋回時において、前記左走行装置と前記右走行装置とのうち内側の走行装置を外側の走行装置よりも減速させることで、前記作業機械を旋回させ、
前記第2操舵制御において、前記位置偏差が小さいほど、前記減速比を大きくする、
請求項6に記載のシステム。
【請求項8】
前記コントローラは、
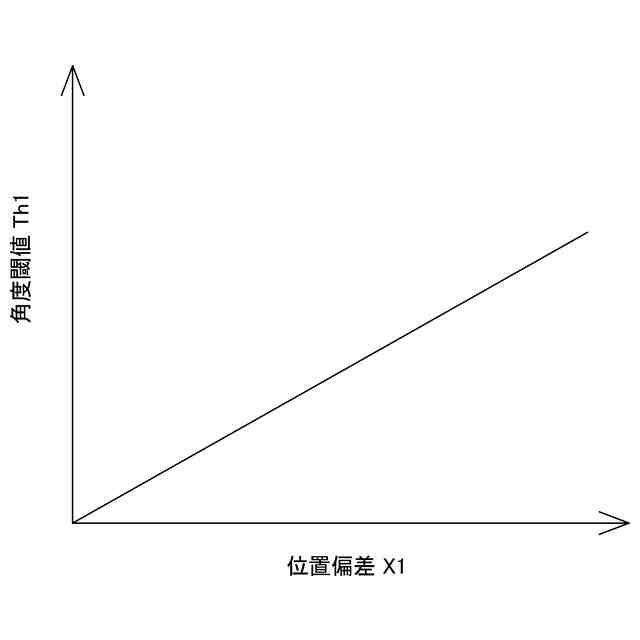
前記位置偏差に応じて前記角度閾値を決定する、
請求項1に記載のシステム。
【請求項9】
前記コントローラは、前記位置偏差が大きいほど、前記角度閾値を大きくする、
請求項8に記載のシステム。
【請求項10】
作業機を含む作業機械を制御するための方法であって、
前記作業機によって施工される地形上において延びる目標線を取得することと、
前記作業機械の現在位置を取得することと、
前記作業機械の方位を取得することと、
前記目標線と前記作業機械との方位偏差を取得することと、
前記作業機械の現在位置と前記目標線との間の距離を位置偏差として取得することと、
前記方位偏差が角度閾値より大きいかを判定することと、
前記方位偏差が前記角度閾値より大きい場合には、前記方位偏差と前記位置偏差とに基づいて前記作業機械の旋回半径を決定し、前記旋回半径に基づいて前記作業機械を自動操舵する第1操舵制御により、前記作業機械を制御すること、
を備える方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を制御するためのシステム及び方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
作業機械には、車体と作業機とを含み、作業機により掘削などの作業を行うものがある。例えば、作業機械により、線状の長い溝を掘る作業を行うことがある。作業機械のオペレータは、作業機械を操作して、施工される地形上において延びる目標線上に、作業機械を移動させる。オペレータは、作業機によって目標線上の地形を掘削する。そして、オペレータは、目標線に沿って作業機械を後進させる。これらの掘削と後進とを繰り返すことで、地形上に線状の長い溝が施工される(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2017/010563号
【発明の概要】
【発明が解決しようとする課題】
【0004】
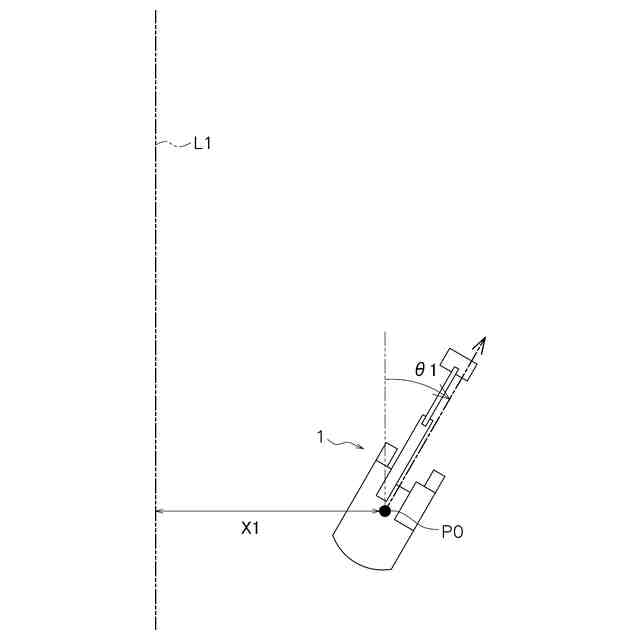
上述の作業では、作業機械が目標線から離れている場合には、まず作業機械を目標線に接近させる必要がある。その場合、後の作業を容易にするために、作業機械の方位を目標線と平行にすることが好ましい。しかし、そのためには、オペレータは、作業機械を目標線に向かって走行させなら、作業機械が目標線に到達したときに作業機械の方位が目標線と平行になるように、作業機械を精密に操舵する必要があり、オペレータへの負担が大きい。本開示の目的は、作業機械が目標線に到達したときに作業機械の方位を目標線と平行にするためのオペレータの負担を軽減することにある。
【課題を解決するための手段】
【0005】
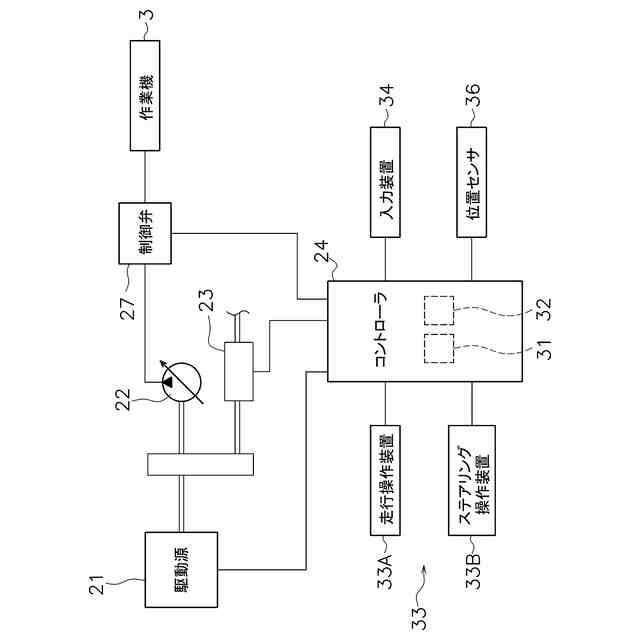
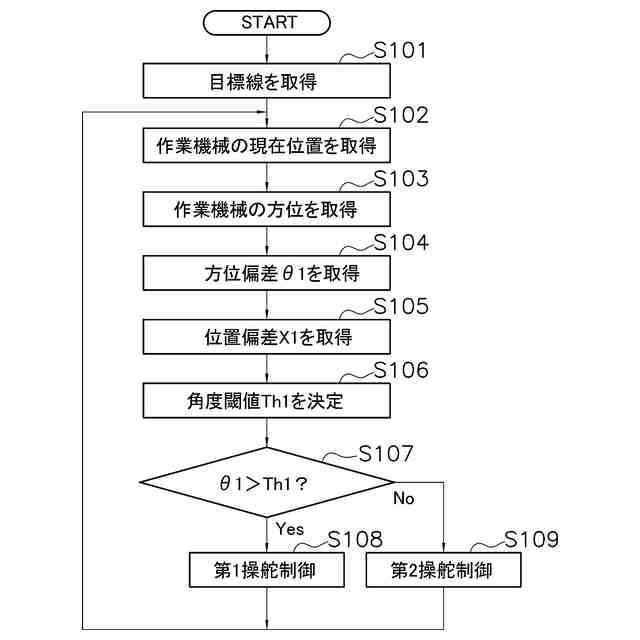
本開示の一態様に係るシステムは、作業機を含む作業機械を制御するためのシステムである。当該システムは、コントローラを備える。コントローラは、作業機によって施工される地形上において延びる目標線を取得する。コントローラは、作業機械の現在位置を取得する。コントローラは、作業機械の方位を取得する。コントローラは、目標線と作業機械との方位偏差を取得する。コントローラは、作業機械の現在位置と目標線との間の距離を位置偏差として取得する。コントローラは、方位偏差が角度閾値より大きいかを判定する。コントローラは、方位偏差が角度閾値より大きい場合には、第1操舵制御により、作業機械を制御する。コントローラは、第1操舵制御において、方位偏差と位置偏差とに基づいて作業機械の旋回半径を決定し、旋回半径に基づいて作業機械を自動操舵する。
【0006】
本開示の他の態様に係る方法は、作業機を含む作業機械を制御するための方法である。当該方法は、作業機によって施工される地形上において延びる目標線を取得することと、作業機械の現在位置を取得することと、作業機械の方位を取得することと、目標線と作業機械との方位偏差を取得することと、作業機械の現在位置と目標線との間の距離を位置偏差として取得することと、方位偏差が角度閾値より大きいかを判定することと、方位偏差が角度閾値より大きい場合には、方位偏差と位置偏差とに基づいて作業機械の旋回半径を決定し、旋回半径に基づいて作業機械を自動操舵する第1操舵制御により、作業機械を制御すること、を備える。
【発明の効果】
【0007】
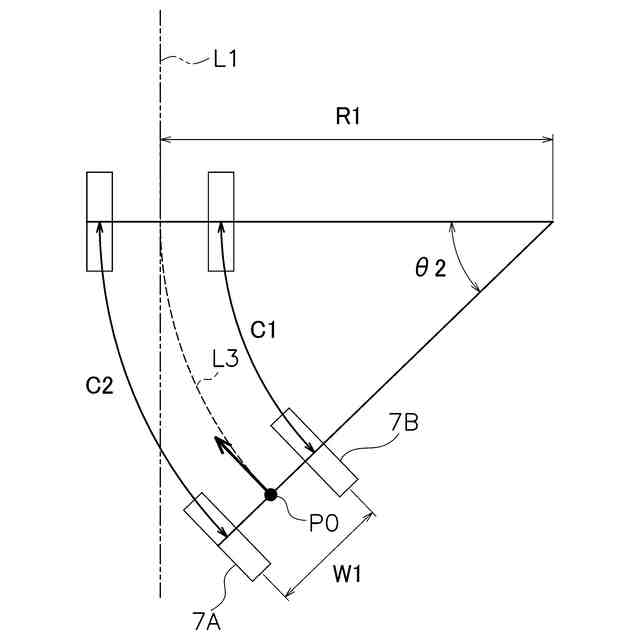
本開示によれば、作業機械と目標線との方位偏差が角度閾値より大きい場合には、第1操舵制御により、作業機械が制御される。第1操舵制御では、方位偏差と位置偏差とに基づいて、作業機械の旋回半径が決定される。そして、作業機械は、旋回半径に従って自動操舵されることで、作業機械が目標線に到達したときに作業機械の方位が目標線と平行になる。それにより、オペレータへの負担が軽減される。
【図面の簡単な説明】
【0008】
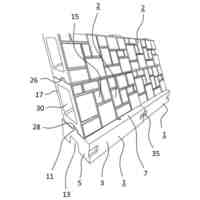
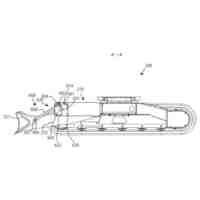
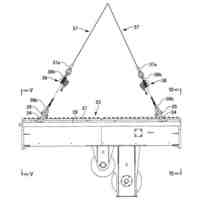
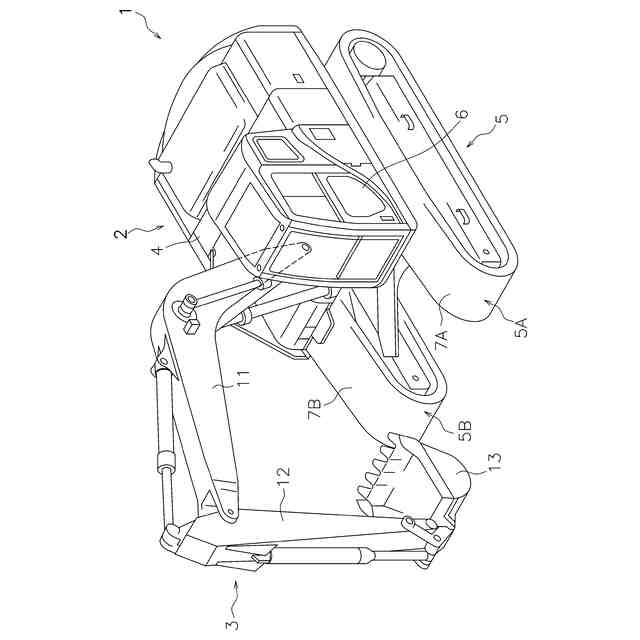
作業機械の斜視図である。
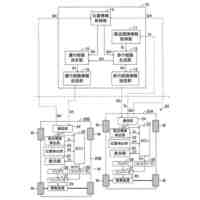
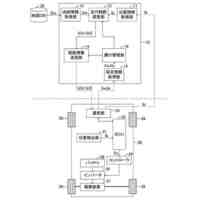
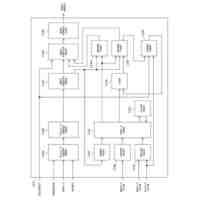
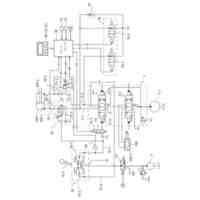
作業機械およびその制御システムの構成を示すブロック図である。
自動操舵制御の処理を示すフローチャートである。
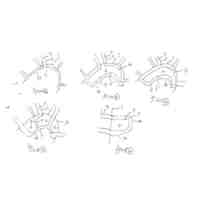
作業機械と設計線と目標線とを示す上面図である。
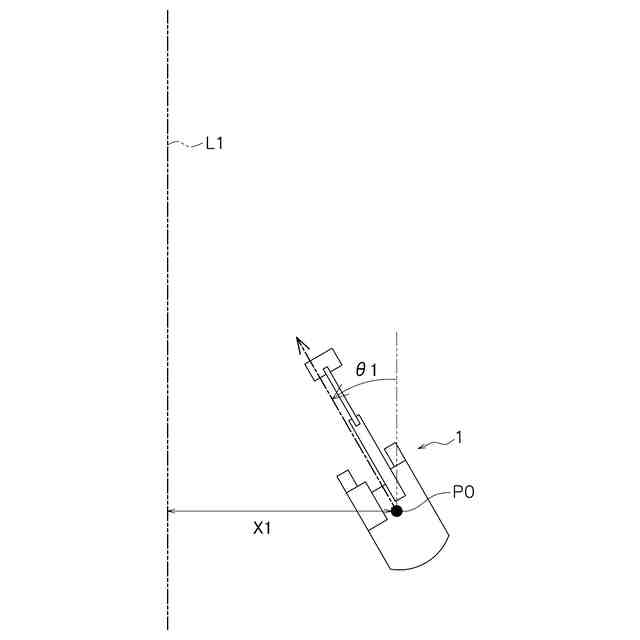
作業機械と目標線とを示す上面図である。
作業機械と目標線とを示す上面図である。
角度閾値データの一例を示す図である。
減速比の決定方法を示す図である。
減速比データの一例を示す図である。
第1操舵制御と第2操舵制御とによる作業機械の走行の軌道を示す上面図である。
【発明を実施するための形態】
【0009】
以下、実施形態に係る作業機械について、図面を参照しながら説明する。図1は、作業機械1の側面図である。本実施形態において、作業機械1は、油圧ショベル、或いは電動ショベルなどの掘削機である。
【0010】
図1に示すように、作業機械1は、車体2と作業機3とを含む。車体2は、旋回体4と走行体5とを含む。作業機3は、旋回体4に取り付けられている。旋回体4は、走行体5に対して旋回可能に接続されている。旋回体4は、上下方向に延びる旋回軸周りに旋回可能である。旋回体4には、キャブ6が配置されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
運行管理装置
1日前
トヨタ自動車株式会社
運行管理装置
1日前
トヨタ自動車株式会社
車両走行管理装置
1日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
1日前
個人
大都市防災設備
1か月前
個人
鋼管
9日前
日立建機株式会社
作業機械
1か月前
株式会社奥村組
ケーソン工法
1日前
大成建設株式会社
新設構造物
1か月前
株式会社奥村組
ケーソン刃口金物
1日前
株式会社武井工業所
積みブロック
18日前
個人
水底地盤の天地返し工法と専用作業船
1か月前
株式会社大林組
袋体付き排水パイプ
8日前
株式会社大林組
袋体付き排水パイプ
8日前
ヤンマーホールディングス株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
株式会社大林組
基礎構造
1か月前
日立建機株式会社
作業機械
16日前
大和ハウス工業株式会社
杭抜き先端具
2日前
ゼニヤ海洋サービス株式会社
通船ゲート
8日前
住友金属鉱山株式会社
タンク設置用基礎
1か月前
株式会社地盤改良堀田
基礎杭の設置方法
1か月前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
1か月前
株式会社フジタ
掘削機
17日前
鹿島建設株式会社
接続方法および接続構造
8日前
有限会社 櫂設計事務所
掘削・撹拌具
24日前
JFEスチール株式会社
鋼管矢板の継手構造
10日前
JFEスチール株式会社
鋼管矢板の継手構造
10日前
株式会社フジタ
建築物とその施工方法
8日前
株式会社山幸総建
シートパイルの土砂除去具
1か月前
株式会社大林組
建物の構築方法及び建物
8日前
株式会社日立建機ティエラ
建設機械
1か月前
個人
日本列島都市防災設備又は日本列島大都市防災設備
1か月前
日本車輌製造株式会社
建設機械の組立方法
1か月前
アロン化成株式会社
排水管通気設備
1か月前
アクアインテック株式会社
メーターボックスの蓋
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ