TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119070
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2022083858
出願日
2022-05-23
発明の名称
作業機械
出願人
日立建機株式会社
代理人
個人
主分類
E02F
9/26 20060101AFI20250806BHJP(水工;基礎;土砂の移送)
要約
【課題】移動体の破損、落下、盗難を防止するとともに、移動体を外部環境から保護することができる作業機械を提供する。
【解決手段】走行可能な機体(10)と、機体(10)に設けられた作業装置(20)と、機体(10)と独立して移動可能な移動体(40)とを備えた作業機械(1)であって、機体(10)の上面部に搭載され、移動体(40)を格納する格納室(44)、及び機体(10)に対する移動体(40)の離脱及び格納に際し格納室(44)を開閉するカバー(46)を有する格納装置(70)を備える。
【選択図】図7
特許請求の範囲
【請求項1】
走行可能な機体と、前記機体に設けられた作業装置と、前記機体と独立して移動可能な移動体とを備えた作業機械であって、
前記機体の上面部に搭載され、前記移動体を格納する格納室、及び前記機体に対する前記移動体の離脱及び格納に際し前記格納室を開閉するカバーを有する格納装置を備えることを特徴とする作業機械。
続きを表示(約 370 文字)
【請求項2】
前記格納装置は、
前記カバーの前記格納室に向けた内側面に取り付けられる第1緩衝部材と、
前記格納室における前記移動体の載置面に取り付けられる第2緩衝部材と
を有し、
前記第1緩衝部材及び前記第2緩衝部材は、前記カバーを閉じた状態で前記格納室内に格納された前記移動体に当接し、前記格納室内における前記移動体の移動を規制することを特徴とする請求項1に記載の作業機械。
【請求項3】
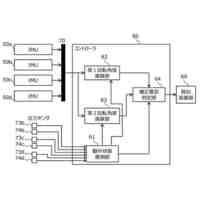
前記作業装置の動作を制御する制御装置と、
前記制御装置と通信可能であって前記カバーを開閉するためのカバー開閉スイッチが配置された操作装置と、
前記カバー開閉スイッチを操作することにより前記カバーを開閉する駆動装置と
を備えることを特徴とする請求項2に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関し、特に作業機械の機体と独立して移動可能な移動体を備えた作業機械に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、機体と、機体に設けられた作業装置と、機体を走行させる走行装置と、機体と独立して移動可能な移動体とを備えた作業機械が開示されている。移動体は、ドローンなどのUAV(Unmanned Aerial Vehicle)であり、機体に追従して移動し、施工現場の測量や施工現場における作業機械の位置情報を取得する。移動体には、機体に搭載された給電装置からケーブルを介して給電される。また、移動体は、稼働していない状態において、オペレータが搭乗するキャビン(運転室)の上面部に搭載される。
【先行技術文献】
【特許文献】
【0003】
特開2021-55374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
稼働していない移動体は、機体の上面部に露出して配置される。このため、移動体は、作業機械の作業中に衝撃や振動を受けて破損したり、落下したりするおそれがあり、また、風雨などの外部環境に曝されて、故障したり、劣化したりするおそれがある。また、移動体の盗難防止を図ることも求められている。
【0005】
本発明は、このような課題に鑑みてなされたもので、移動体の破損、落下、盗難を防止するとともに、移動体を外部環境から保護することができる作業機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するべく、本発明の作業機械は、走行可能な機体と、機体に設けられた作業装置と、機体と独立して移動可能な移動体とを備えた作業機械であって、機体の上面部に搭載され、移動体を格納する格納室、及び機体に対する移動体の離脱及び格納に際し格納室を開閉するカバーを有する格納装置を備える。
【発明の効果】
【0007】
本発明の作業機械によれば、移動体の破損、落下、盗難を防止するとともに、移動体を外部環境から保護することができる。
【図面の簡単な説明】
【0008】
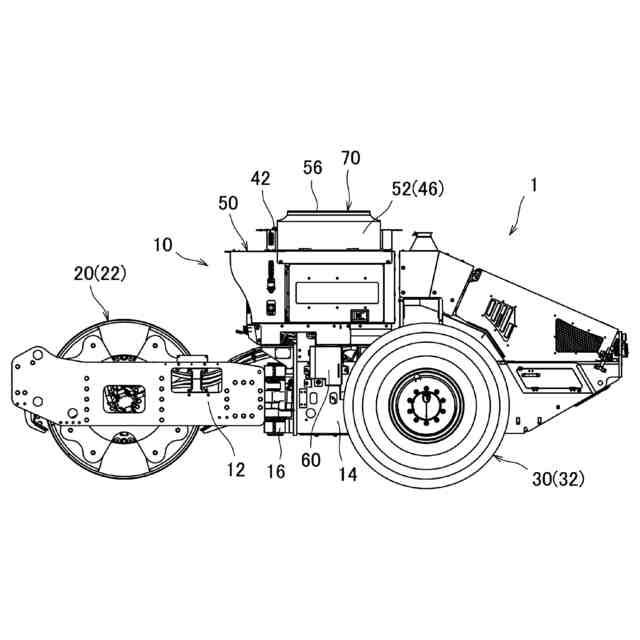
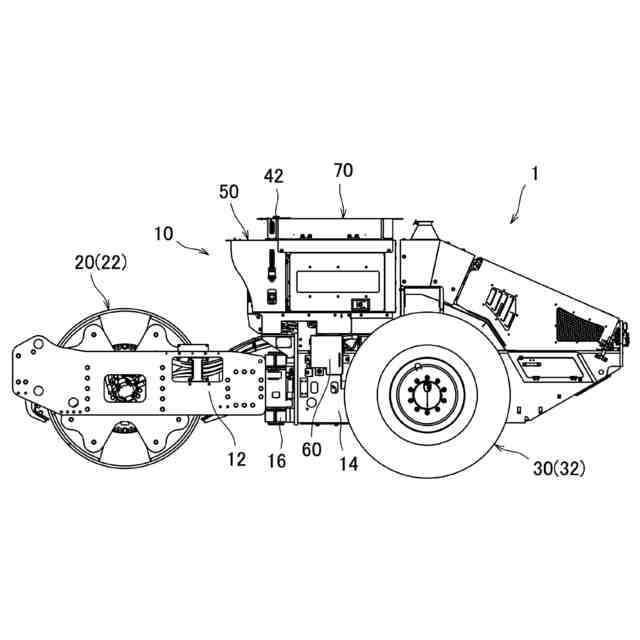
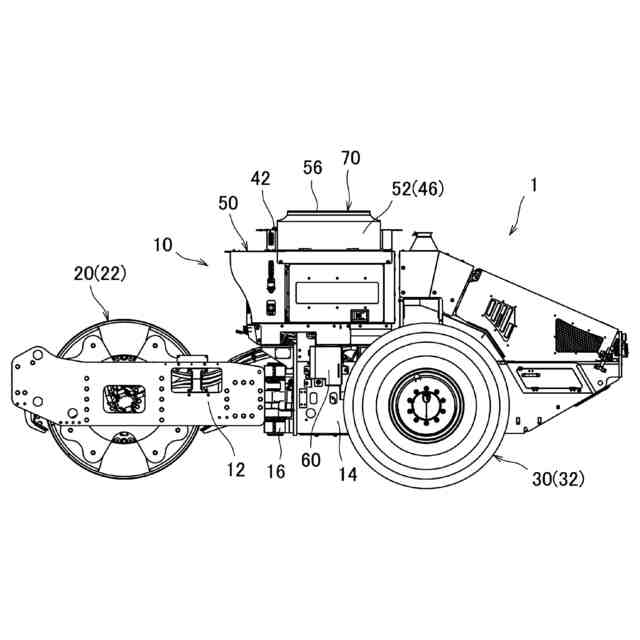
作業機械の側面図である。
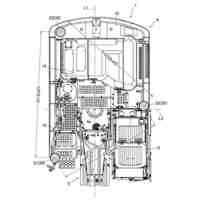
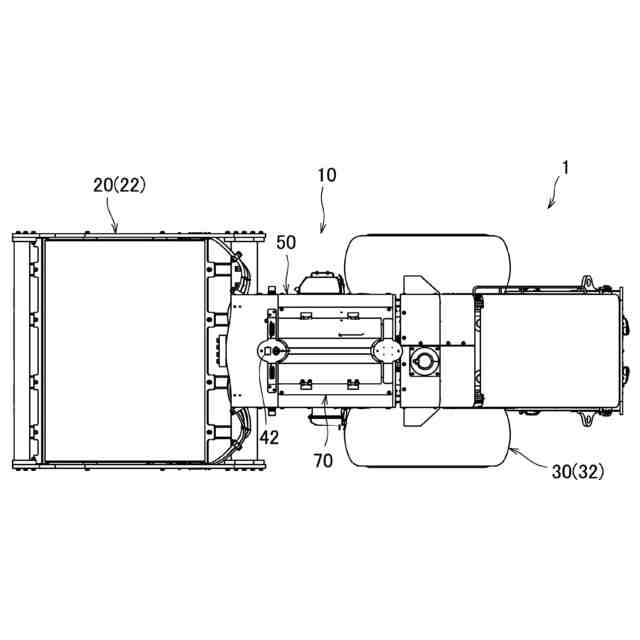
作業機械の上面図である。
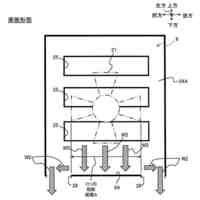
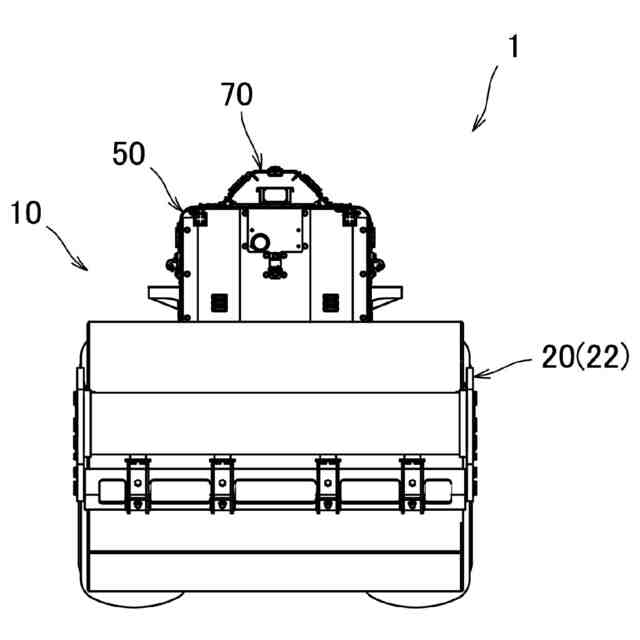
作業機械の前方正面図である。
作業機械の後方正面図である。
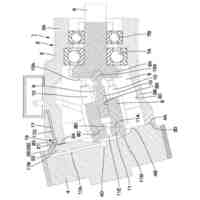
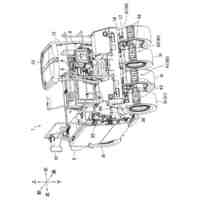
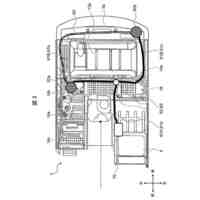
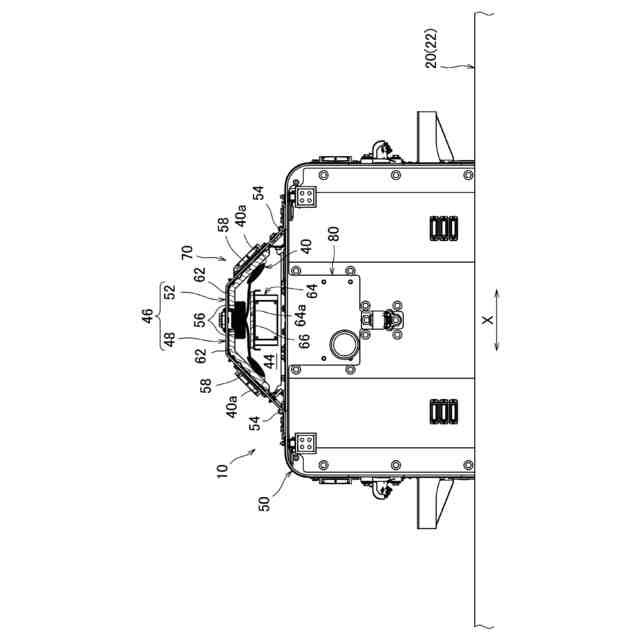
カバーを閉じた状態の制御装置及び格納装置の拡大図である。
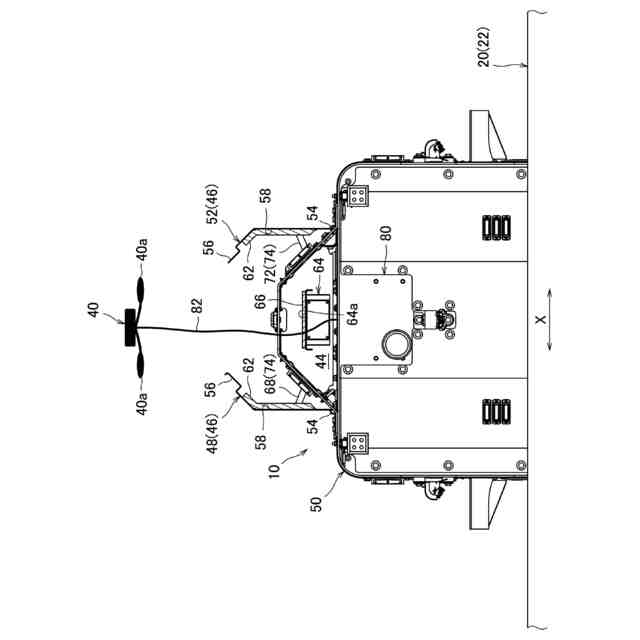
カバーを開いた状態の制御装置及び格納装置の拡大図である。
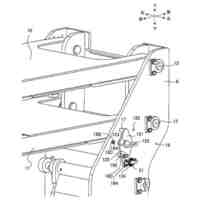
カバーを開いた状態の作業機械の側面図である。
カバーを開いた状態の作業機械の上面図である。
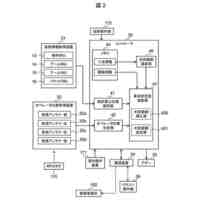
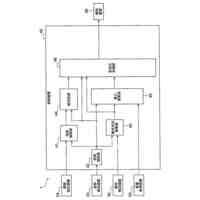
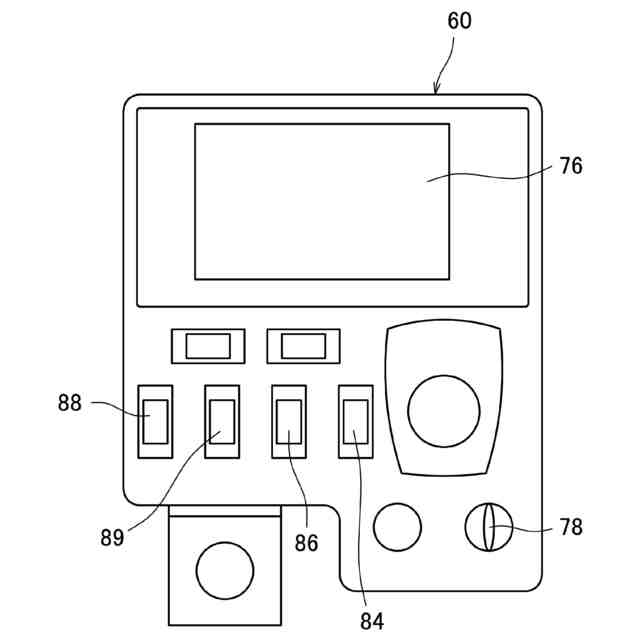
操作盤の構成図である。
無線リモコンの構成図である。
油圧システムの構成図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態に係る作業機械について図面を参照して説明する。図1は作業機械1の側面図、図2は作業機械1の上面図、図3は作業機械1の前方正面図、図4は作業機械1の後方正面図、をそれぞれ示す。なお、図1における左側が作業機械1の前方であり、図1における右側が作業機械1の後方である。
【0010】
作業機械1は、機体10と、機体10に設けられた作業装置20と、機体10を走行させる走行装置30と、機体10と独立して移動可能な移動体40(後述の図5及び図6に図示)とを備えている。詳しくは、本実施形態の作業機械1は、アスファルト路面の転圧施工等に使用される土工振動ローラ(転圧機械)であって、機体10として、フロント機体12及びリア機体14を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
建設機械
27日前
日立建機株式会社
作業車両
23日前
日立建機株式会社
油圧機器
22日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業車両
21日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
転圧機械
21日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
21日前
日立建機株式会社
建設機械
21日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業車両
23日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
23日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
23日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
作業車両
20日前
日立建機株式会社
作業車両
16日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
変速装置
20日前
日立建機株式会社
ポンプ装置
21日前
日立建機株式会社
電動建設機械
23日前
日立建機株式会社
動力伝達装置
23日前
日立建機株式会社
運用管理装置
20日前
日立建機株式会社
映像記録装置
20日前
日立建機株式会社
施工管理装置
21日前
日立建機株式会社
ダンプトラック
21日前
日立建機株式会社
電動式作業機械
21日前
日立建機株式会社
ホイールローダ
20日前
日立建機株式会社
ホイールローダ
20日前
日立建機株式会社
作業支援システム
21日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ