TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139287
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038133
出願日
2024-03-12
発明の名称
作業機械の操作システム、および作業機械の操作方法
出願人
株式会社小松製作所
,
国立大学法人大阪大学
代理人
弁理士法人深見特許事務所
主分類
E02F
9/20 20060101AFI20250918BHJP(水工;基礎;土砂の移送)
要約
【課題】操作システムの操作性を向上する。
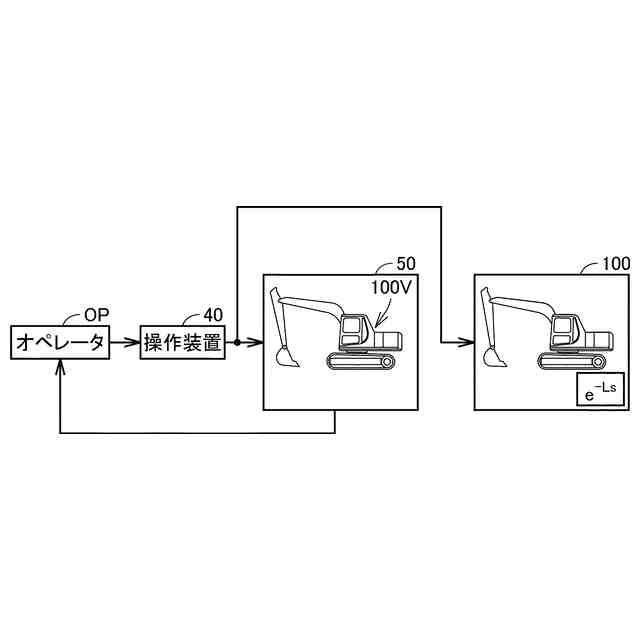
【解決手段】作業機械100の操作システムは、作業機械100を駆動させるアクチュエータと、アクチュエータを動作させるために操作される操作装置40と、作業機械100に関する情報を表示する表示装置50と、コントローラとを備えている。コントローラは、仮想作業機械100Vを、作業機械100に関する情報として、表示装置50に表示させる。仮想作業機械100Vは、操作装置40が操作されてから作業機械100が実際に動き出すまでの無駄時間以下の時間分、作業機械100よりも先に動く。無駄時間は、理想的な操作性能と実際の操作性能との差の時間を含む。
【選択図】図6
特許請求の範囲
【請求項1】
作業機械を駆動させるアクチュエータと、
前記アクチュエータを動作させるために操作される操作装置と、
前記作業機械に関する情報を表示する表示装置と、
コントローラと、を備える、作業機械の操作システムであって、
前記コントローラは、前記操作装置が操作されてから前記作業機械が実際に動き出すまでの無駄時間以下の時間分前記作業機械よりも先に動く仮想作業機械を前記情報として前記表示装置に表示させ、
前記無駄時間は理想的な操作性能と実際の操作性能との差の時間を含む、作業機械の操作システム。
続きを表示(約 970 文字)
【請求項2】
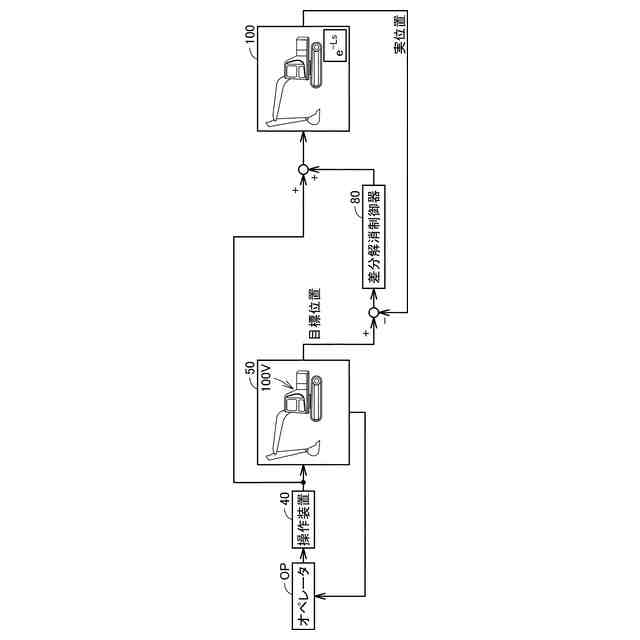
前記コントローラは、前記操作装置の操作に基づく動作の目標値と、前記作業機械が実際に動作した動作の実測値と、の差異を小さくする指令信号を、前記作業機械に出力する、請求項1に記載の作業機械の操作システム。
【請求項3】
前記コントローラは、前記操作装置の操作に基づく動作の目標値に対して前記無駄時間を考慮した補正目標値と、前記作業機械が実際に動作した動作の実測値と、の差異を小さくする指令信号を、前記作業機械に出力する、請求項1に記載の作業機械の操作システム。
【請求項4】
前記コントローラは、前記作業機械の実際の動作を反映した映像を前記仮想作業機械に重畳させて、前記表示装置に表示させる、請求項1に記載の作業機械の操作システム。
【請求項5】
前記コントローラは、前記映像と前記仮想作業機械との間に、補間仮想映像をさらに重畳させて、前記表示装置に表示させる、請求項4に記載の作業機械の操作システム。
【請求項6】
前記コントローラは、前記作業機械と前記仮想作業機械との差異が増大して閾値に到達すると、前記表示装置に表示される前記仮想作業機械を停止させる、請求項1に記載の作業機械の操作システム。
【請求項7】
前記コントローラは、前記作業機械と前記仮想作業機械との差異が増大して閾値に到達すると、前記表示装置に表示される前記仮想作業機械を前記作業機械の実位置に近づける、請求項1に記載の作業機械の操作システム。
【請求項8】
前記アクチュエータは、油圧アクチュエータを含み、
前記無駄時間は前記油圧アクチュエータに供給される作動油の特性に起因する時間を含む、請求項1に記載の作業機械の操作システム。
【請求項9】
作業機械を駆動させるアクチュエータを動作させるために操作装置を操作することと、
前記操作装置が操作されてから前記作業機械が実際に動き出すまでの無駄時間以下の時間分前記作業機械よりも先に動く仮想作業機械を、前記作業機械に関する情報として表示装置に表示させることと、を備え、
前記無駄時間は理想的な操作性能と実際の操作性能との差の時間を含む、作業機械の操作方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の操作システム、および作業機械の操作方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特開2021-99017号公報(特許文献1)には、遠隔操作装置と、遠隔操作対象である作業機械と、により構成される、遠隔操作システムが開示されている。遠隔制御装置は、第1時点におけるオペレータによる遠隔操作機構の操作態様に基づいて、第1時点よりも後の第2時点におけるバケットの位置姿勢を推定する。遠隔制御装置は、作業機械に搭載されている撮像装置を通じて取得された画像に、第2時点におけるバケットの推定された位置姿勢を表す画像を、重畳して表示させる。
【先行技術文献】
【特許文献】
【0003】
特開2021-99017号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
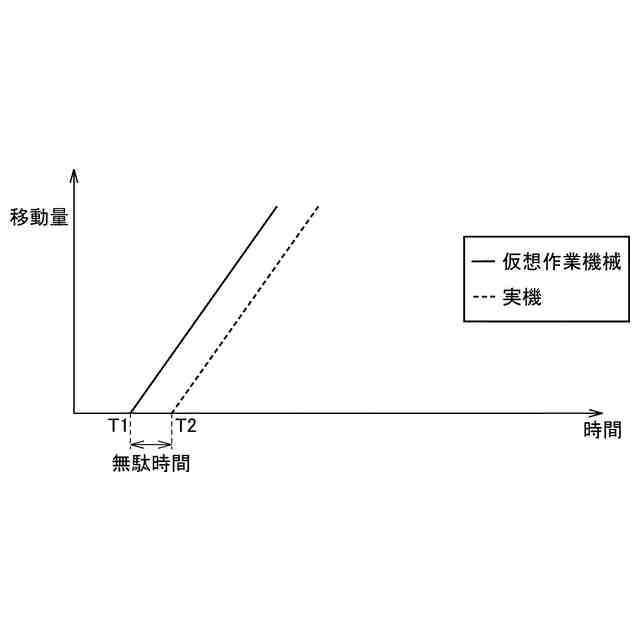
オペレータが操作装置を操作してから作業機械が実際に動き出すまでに無駄時間が生じる場合がある。オペレータが、表示装置に表示されている作業機械の映像を見ながら操作装置を操作する場合、この無駄時間が、作業機械の操作性を低下させることがある。
【0005】
本開示では、操作性を向上できる、作業機械の操作システムおよび作業機械の操作方法が提案される。
【課題を解決するための手段】
【0006】
本開示のある局面に従った作業機械の操作システムは、作業機械を駆動させるアクチュエータと、アクチュエータを動作させるために操作される操作装置と、作業機械に関する情報を表示する表示装置と、コントローラとを備えている。コントローラは、仮想作業機械を作業機械に関する情報として表示装置に表示させる。仮想作業機械は、操作装置が操作されてから作業機械が実際に動き出すまでの無駄時間以下の時間分、作業機械よりも先に動く。無駄時間は、理想的な操作性能と実際の操作性能との差の時間を含む。
【0007】
本開示のある局面に従った作業機械の操作方法は、以下のステップを備えている。第1のステップは、作業機械を駆動させるアクチュエータを動作させるために操作装置を操作することである。第2のステップは、操作装置が操作されてから作業機械が実際に動き出すまでの無駄時間以下の時間分作業機械よりも先に動く仮想作業機械を、作業機械に関する情報として表示装置に表示させることである。無駄時間は、理想的な操作性能と実際の操作性能との差の時間を含む。
【発明の効果】
【0008】
本開示の作業機械の操作システムおよび作業機械の操作方法によれば、操作性を向上することができる。
【図面の簡単な説明】
【0009】
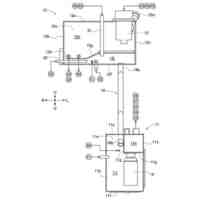
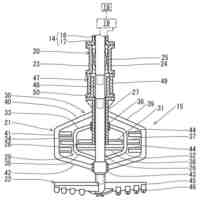
油圧ショベルの外観図である。
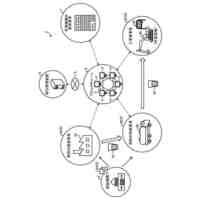
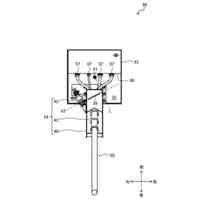
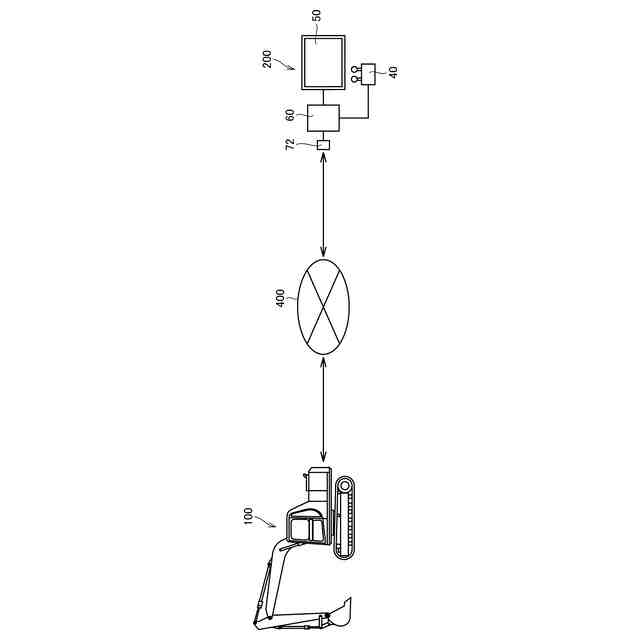
油圧ショベルの遠隔操作システムの一例を模式的に示す図である。
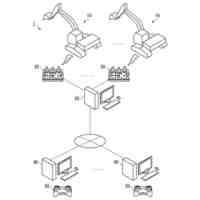
遠隔操作装置の一例を模式的に示す図である。
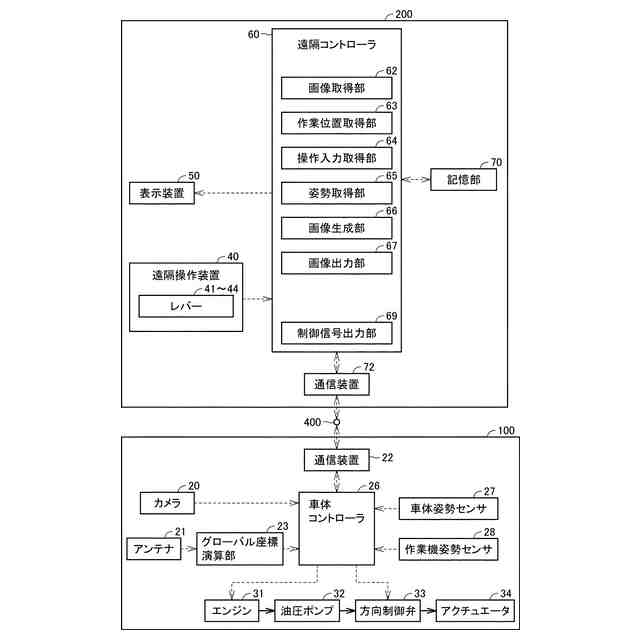
操作システムの構成例を示す機能ブロック図である。
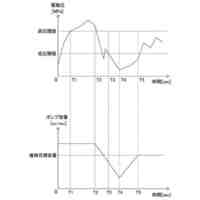
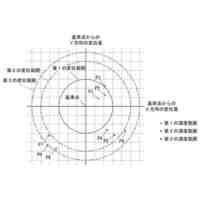
無駄時間について示す概念図である。
オペレータによる操作に従った制御対象の動作の第1の例を示すブロック線図である。
実機および仮想作業機械の動作の第1の例を示す図である。
オペレータによる操作に従った制御対象の動作の第2の例を示すブロック線図である。
差分解消制御器にPID制御を適用した場合の例を示すブロック線図である。
無駄時間を考慮したPID制御を適用した場合の例を示すブロック線図である。
オペレータによる操作に従った制御対象の動作の第3の例を示すブロック線図である。
仮想作業機械に映像を重畳させて表示する表示装置を示す第1の図である。
仮想作業機械に映像を重畳させて表示する表示装置を示す第2の図である。
実機および仮想作業機械の動作の第2の例を示す図である。
実機および仮想作業機械の動作の第3の例を示す図である。
【発明を実施するための形態】
【0010】
以下、実施形態について図に基づいて説明する。以下の説明では、同一の部品および構成要素には同一の符号を付してある。それらの名称および機能も同じである。したがって、これらについての詳細な説明は繰り返さない。図面では、説明の便宜上、構成を省略または簡略化している場合もある。実施形態から任意の構成が抽出され、それらが任意に組み合わされることも、当初から予定されている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
多段変速機
7日前
株式会社小松製作所
管理システム、管理装置、及び管理方法
14日前
株式会社小松製作所
作業機械及び作業機械を制御するための方法
7日前
株式会社小松製作所
作業車両の制御装置および作業車両の制御方法
14日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
1日前
株式会社小松製作所
作業機械の遠隔操作システムおよび作業機械の遠隔操作方法
8日前
株式会社小松製作所
消費電力予測装置、作業機械、消費電力予測システム、消費電力予測方法、およびプログラム
15日前
鹿島建設株式会社
接続方法
23日前
日本車輌製造株式会社
杭打機
3日前
大新土木株式会社
均し台船
1日前
ウエダ産業株式会社
アタッチメント
14日前
株式会社クボタ
作業車
2日前
株式会社郷土開発
傾斜地の切土工法
22日前
日本車輌製造株式会社
建設機械
7日前
エポコラム機工株式会社
地盤改良装置
7日前
日立建機株式会社
建設機械
9日前
日立建機株式会社
作業機械
1か月前
株式会社クボタ
作業機
22日前
日本車輌製造株式会社
建設機械
1日前
大和ハウス工業株式会社
泥回収システム
1日前
大和ハウス工業株式会社
泥回収システム
1日前
アロン化成株式会社
排水管通気設備
1日前
ナブテスコ株式会社
ドーザブレード駆動機構
1か月前
東洋テクノ株式会社
スライム処理装置
1日前
株式会社大林組
掘削支援装置及び掘削支援方法
16日前
住友重機械工業株式会社
ショベル、操作支援システム
1日前
強化土エンジニヤリング株式会社
地盤注入工法
1日前
セイコー機器株式会社
親綱支柱
3日前
株式会社竹中工務店
構真柱
2日前
日立建機株式会社
作業機械
2日前
エポコラム機工株式会社
地盤改良装置及び地盤改良工法
7日前
エポコラム機工株式会社
地盤改良装置及び地盤改良工法
7日前
コベルコ建機株式会社
建設機械
9日前
ヤンマーホールディングス株式会社
作業機械
22日前
コベルコ建機株式会社
建設機械
9日前
日本車輌製造株式会社
杭打機のワイヤロープ掛け回し構成
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ