TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025176605
公報種別
公開特許公報(A)
公開日
2025-12-04
出願番号
2024082877
出願日
2024-05-21
発明の名称
作業機械の遠隔操作システムおよび作業機械の遠隔操作方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/20 20060101AFI20251127BHJP(水工;基礎;土砂の移送)
要約
【課題】汎用的な操作装置を用いて作業機械の遠隔操作を実現する。
【解決手段】可搬式の操作装置は、操作に応じてオンまたはオフの入力値を検出する二値入力部と、操作量に応じた連続値である入力値を検出する連続値入力部とを備える。コンピュータは、操作装置が検出した入力値に基づいて作業機械の動作指令を生成する。コンピュータは、第一操作パターンと第二操作パターンと入力値とに従って動作指令を生成する。第一操作パターンは、二値入力部に割り当てられる第一アクチュエータと、二値入力部の入力値がオンであるときの指令値と、を表す。第二操作パターンは、連続値入力部に割り当てられる第二アクチュエータと、連続値入力部の入力値に対する前記指令値の関係と、を表す。
【選択図】図1
特許請求の範囲
【請求項1】
操作に応じてオンまたはオフの入力値を検出する二値入力部と、操作量に応じた連続値である入力値を検出する連続値入力部とを備える可搬式の操作装置と、
前記操作装置が検出した前記入力値に基づいて作業機械の動作指令を生成するコンピュータと、
を備え、
前記コンピュータは、
前記作業機械が備える複数のアクチュエータのうち前記二値入力部に割り当てられる第一アクチュエータと、前記二値入力部の前記入力値がオンであるときの指令値と、を表す第一操作パターンと、
前記作業機械が備える複数のアクチュエータのうち前記連続値入力部に割り当てられる第二アクチュエータと、前記連続値入力部の前記入力値に対する前記指令値の関係と、を表す第二操作パターンと、
前記操作装置からの前記入力値と、
に従って、前記動作指令を生成する
作業機械の遠隔操作システム。
続きを表示(約 1,100 文字)
【請求項2】
前記操作装置は、モードを切り替えるモードスイッチをさらに備え、
前記コンピュータは、前記モードに応じた前記第一操作パターンおよび前記第二操作パターンを有し、前記モードに応じて前記動作指令を生成する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項3】
前記第二アクチュエータは、前記作業機械が備える作業機の上げ下げを行うアクチュエータを含む、
請求項1に記載の作業機械の遠隔操作システム。
【請求項4】
前記操作装置は、操作対象の作業機械を切り替える対象スイッチをさらに備え、
前記コンピュータは、前記操作対象の作業機械に対応する前記第一操作パターンおよび前記第二操作パターンに従って、前記動作指令を生成する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項5】
前記操作対象の作業機械が、走行体と、前記走行体に対して旋回可能に支持された旋回体と、前記旋回体に支持されたブームと前記ブームの先端に設けられたアームと、前記アームの先端に設けられた作業具とを備える油圧ショベルである場合、
前記第二アクチュエータは、前記旋回体に対して前記ブームの上げ下げを行うブームシリンダ、前記ブームに対して前記アームの上げ下げを行うアームシリンダおよび前記旋回体を旋回させる旋回モータの何れかを含む、
請求項4に記載の作業機械の遠隔操作システム。
【請求項6】
前記第一アクチュエータは、前記走行体を走行させる走行モータおよび前記作業具に設けられた可動部を駆動させるアクチュエータの何れかを含む、
請求項5に記載の作業機械の遠隔操作システム。
【請求項7】
操作に応じてオンまたはオフの入力値を検出する二値入力部と、操作量に応じた連続値である入力値を検出する連続値入力部とを備える可搬式の操作装置を用いた作業機械の遠隔操作方法であって、
コンピュータが、
前記作業機械が備える複数のアクチュエータのうち前記二値入力部に割り当てられる第一アクチュエータと、前記二値入力部の前記入力値がオンであるときの指令値と、を表す第一操作パターンと、
前記作業機械が備える複数のアクチュエータのうち前記連続値入力部に割り当てられる第二アクチュエータと、前記連続値入力部の前記入力値に対する前記指令値の関係と、を表す第二操作パターンと、
前記操作装置からの前記入力値と、
に従って、前記作業機械の動作指令を生成する、
作業機械の遠隔操作方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の遠隔操作システムおよび作業機械の遠隔操作方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
遠隔操作によって作業機械を操作する技術が知られている(例えば、特許文献1を参照)。作業機械の遠隔操作に用いられる遠隔操作装置は、作業機械の操作のために設計されたものである。
【先行技術文献】
【特許文献】
【0003】
特開2019-047442号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方で、作業機械の遠隔操作に、ゲームパッドなどの汎用的な操作装置を用いたいというニーズがある。しかしながら、汎用的な操作装置は、作業機械の操作のために設計されたものでないため、作業機械が備えるアクチュエータの数と操作装置の入力部(ボタン、スティックなど)の数とが一致しない可能性が高い。
本開示の目的は、汎用的な操作装置を用いて作業機械を遠隔操作することができる作業機械の遠隔操作システムおよび作業機械の遠隔操作方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、作業機械の遠隔操作システムは、操作に応じてオンまたはオフの入力値を検出する二値入力部と、操作量に応じた連続値である入力値を検出する連続値入力部とを備える可搬式の操作装置と、前記操作装置が検出した前記入力値に基づいて作業機械の動作指令を生成するコンピュータと、を備え、前記コンピュータは、前記作業機械が備える複数のアクチュエータのうち前記二値入力部に割り当てられる第一アクチュエータと、前記二値入力部の前記入力値がオンであるときの指令値と、を表す第一操作パターンと、前記作業機械が備える複数のアクチュエータのうち前記連続値入力部に割り当てられる第二アクチュエータと、前記連続値入力部の前記入力値に対する前記指令値の関係と、を表す第二操作パターンと、前記操作装置からの前記入力値と、に従って、前記動作指令を生成する。
【発明の効果】
【0006】
上記態様によれば、作業機械の遠隔操作システムは、汎用的な操作装置を用いて作業機械の遠隔操作を実現することができる。
【図面の簡単な説明】
【0007】
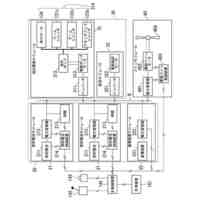
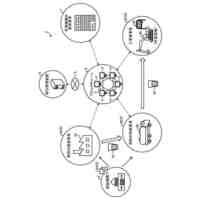
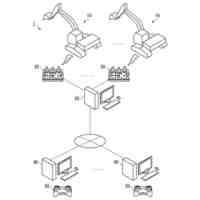
第一実施形態に係る遠隔操作システムの構成を示す概略図である。
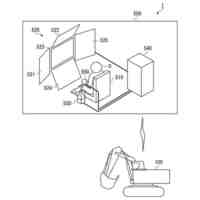
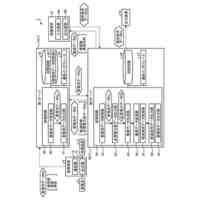
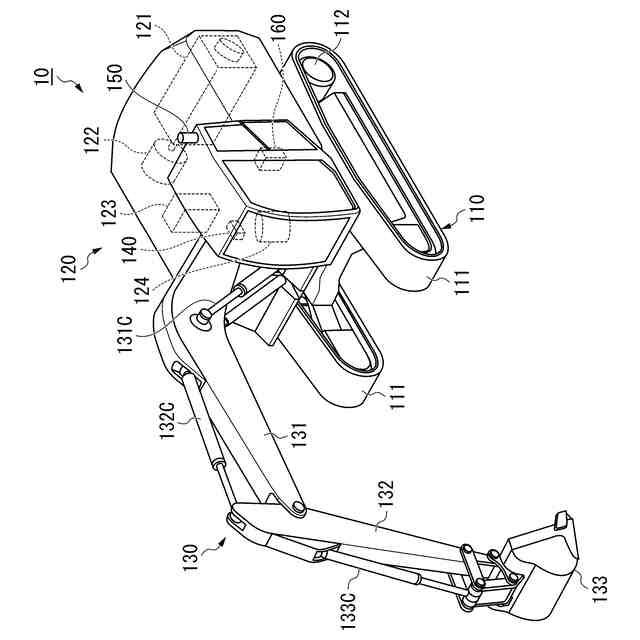
第一実施形態に係る作業機械の構成を示す概略図である。
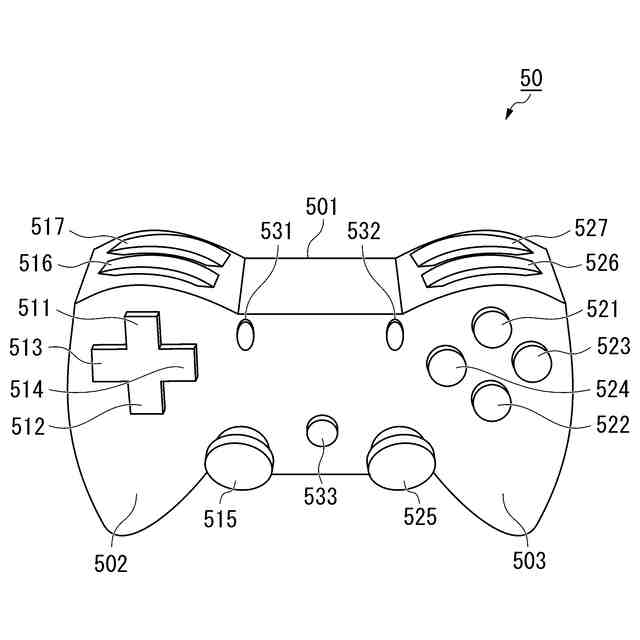
第一実施形態に係る操作装置の一例を示す図である。
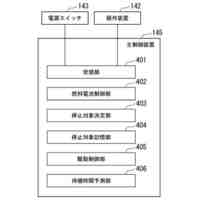
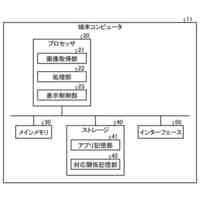
第一実施形態に係る操作コンピュータの構成を示す概略図である。
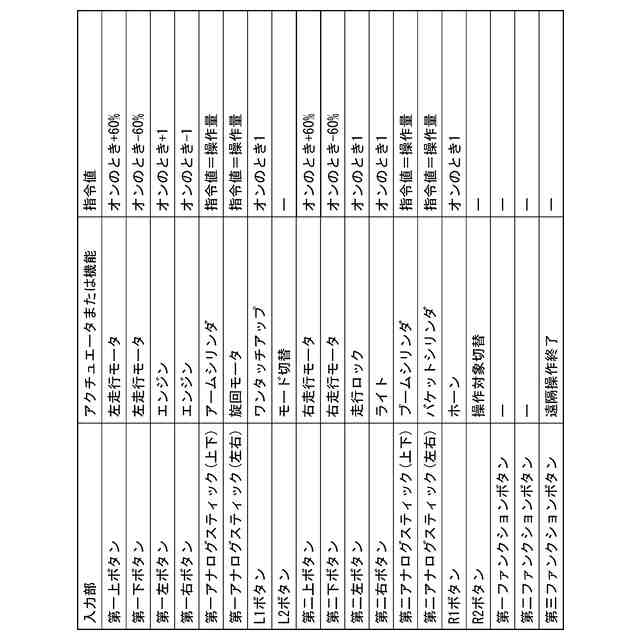
第一実施形態に係る操作パターンデータの一例である。
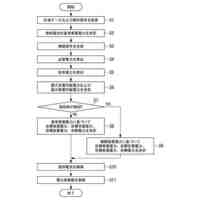
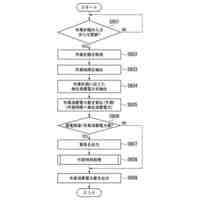
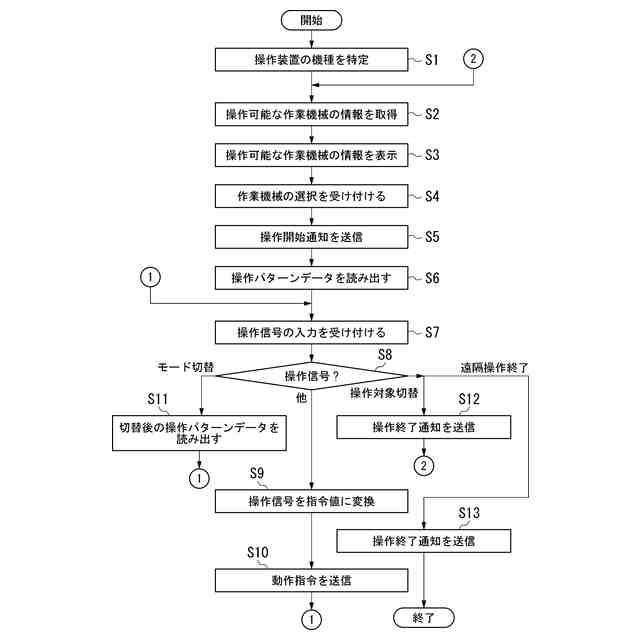
第一実施形態に係る遠隔操作システムによる遠隔操作方法を示すフローチャートである。
他の実施形態に係る遠隔操作システムの構成を示す第一の概略図である。
他の実施形態に係る遠隔操作システムの構成を示す第二の概略図である。
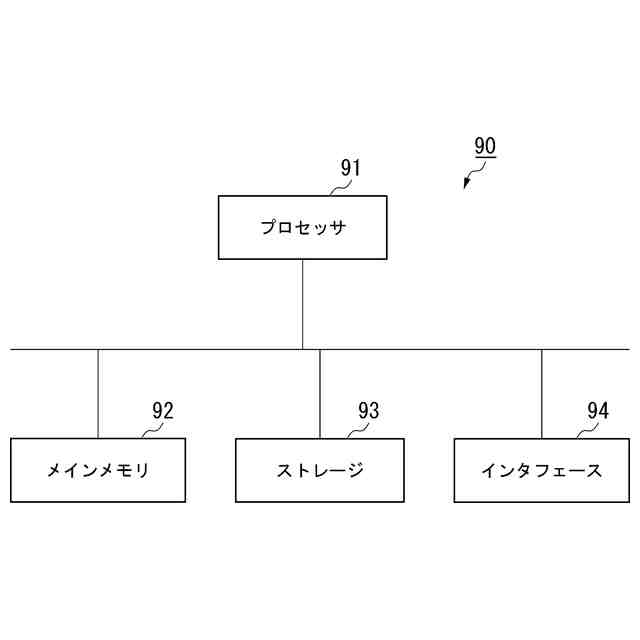
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
【0008】
〈第1の実施形態〉
《遠隔操作システムの構成》
以下、図面を参照しながら実施形態について詳しく説明する。
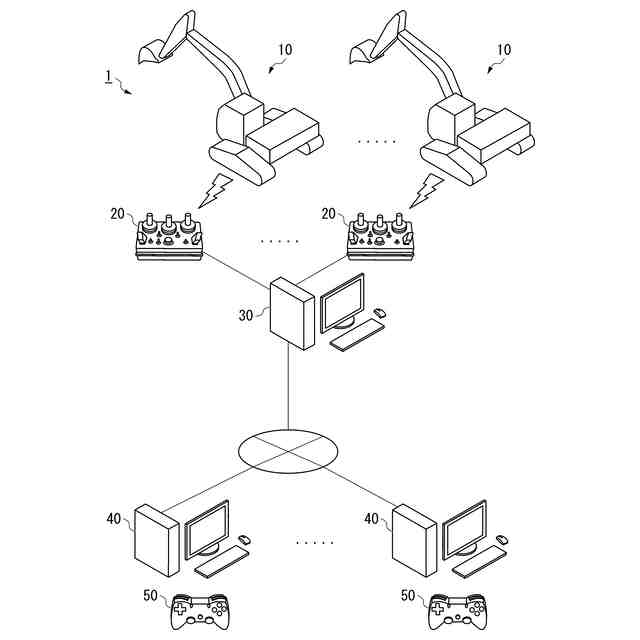
図1は、第一実施形態に係る遠隔操作システム1の構成を示す概略図である。遠隔操作システム1は、作業現場に設けられた作業機械10を、作業現場の遠隔から操作するためのシステムである。
【0009】
遠隔操作システム1は、作業機械10、無線操作装置20、中継コンピュータ30、操作コンピュータ40、操作装置50を備える。図2に示す作業機械10はいずれも油圧ショベルであるが、遠隔操作システム1は、ホイールローダ、ブルドーザ、ダンプトラックなど、異なる種別の作業機械10を備えていてよい。
【0010】
作業機械10は、無線操作装置20から近距離無線通信による動作指令を受け付け、動作指令に従って駆動する。作業機械10と無線操作装置20とは予め一対一に対応付けられており、作業機械10は、対応しない無線操作装置20からの動作指令を無視する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
多段変速機
1日前
株式会社小松製作所
作業機械および方法
29日前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
磁気結合型リアクトル
29日前
株式会社小松製作所
評価装置および評価方法
24日前
株式会社小松製作所
制御システムおよび制御方法
29日前
株式会社小松製作所
作業機械および作業機械の制御方法
16日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業車両および作業車両の制御方法
1か月前
株式会社小松製作所
作業機械および作業機械の制御方法
16日前
株式会社小松製作所
作業車両の制御システム及び作業車両
1か月前
株式会社小松製作所
システム、作業機械、および制御方法
1か月前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
1か月前
株式会社小松製作所
管理システム、管理装置、及び管理方法
8日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
29日前
株式会社小松製作所
作業機械及び作業機械を制御するための方法
1日前
株式会社小松製作所
作業車両の制御装置および作業車両の制御方法
8日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
29日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
29日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
29日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
29日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
1か月前
株式会社小松製作所
作業機械の遠隔操作システムおよび作業機械の遠隔操作方法
2日前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
1か月前
株式会社小松製作所
管理システム及び管理方法
16日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
16日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
16日前
株式会社小松製作所
消費電力予測装置、作業機械、消費電力予測システム、消費電力予測方法、およびプログラム
9日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ