TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132863
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030712
出願日
2024-02-29
発明の名称
作業機械のカメラシステムおよびカメラパラメータの校正方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
H04N
23/60 20230101AFI20250903BHJP(電気通信技術)
要約
【課題】複数の撮像装置の構成を、目印を用いずに精度よく行う。
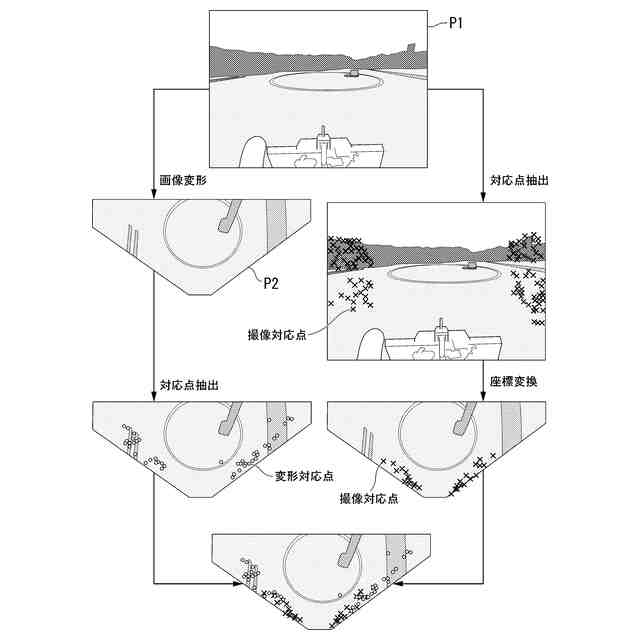
【解決手段】コントローラは、第一撮像画像および第二撮像画像を取得する。コントローラは、第一撮像画像および第二撮像画像のそれぞれを、撮像範囲の重複する部分が互いに連続するように一部を変形することで、第一変形画像および第二変形画像を生成する。コントローラは、第一撮像画像および第二撮像画像、並びに第一変形画像および前記第二変形画像において互いの特徴量が対応する特徴点を抽出し、座標系が揃った複数の対応点に基づいて外部パラメータを校正する。
【選択図】図6
特許請求の範囲
【請求項1】
作業機械の外部を撮像し、撮像範囲の一部が互いに重複する第一撮像装置および第二撮像装置と、
前記第一撮像装置が撮像した第一撮像画像と前記第二撮像装置が撮像した第二撮像画像と前記第一撮像装置および前記第二撮像装置の外部パラメータに基づいて、表示装置に画像を出力するコントローラと、
を備え、
前記コントローラは、
第一撮像画像および第二撮像画像を取得し、
前記第一撮像画像および前記第二撮像画像が互いに連続するように部分を変形することで、第一変形画像および第二変形画像を生成し、
前記第一撮像画像および前記第二撮像画像から、互いの特徴量が対応する複数の撮像対応点を抽出し、
前記第一変形画像および前記第二変形画像の前記撮像範囲の対応する複数の変形対応点を抽出し、
前記複数の変形対応点の位置を前記第一撮像画像または前記第二撮像画像における位置に変換し、または前記複数の撮像対応点の位置を前記第一変形画像または前記第二撮像画像における位置に変換することで、前記複数の撮像対応点および前記複数の変形対応点の座標系を揃え、
座標系が揃った前記複数の撮像対応点および前記複数の変形対応点に基づいて、前記外部パラメータを校正する
作業機械のカメラシステム。
続きを表示(約 1,400 文字)
【請求項2】
前記変形は、前記撮像範囲の重複する部分を引き伸ばす処理を含み、
前記コントローラは、引き延ばされた部分から前記複数の変形対応点を抽出する
請求項1に記載の作業機械のカメラシステム。
【請求項3】
前記引き延ばされた部分は、前記作業機械の周囲の地面が写る部分である
請求項2に記載の作業機械のカメラシステム。
【請求項4】
前記コントローラは、
前記第一撮像装置の外部パラメータが確定した後に、座標系が揃った前記複数の撮像対応点および前記複数の変形対応点に基づいて前記第一撮像装置に対する前記第二撮像装置の位置関係を特定し、前記第一撮像装置の外部パラメータと前記第一撮像装置に対する前記第二撮像装置の位置関係とに基づいて前記第二撮像装置の外部パラメータを校正する
請求項1に記載の作業機械のカメラシステム。
【請求項5】
前記第二撮像装置と撮像範囲の一部が重複する第三撮像装置を備え、
前記コントローラは、
前記第三撮像装置が撮像した第三撮像画像を取得し、
前記第三撮像画像を、前記第二変形画像と連続するように部分を変形することで、第三変形画像を生成し、
前記第二撮像画像および前記第三撮像画像から、前記撮像範囲の対応する複数の撮像対応点を抽出し、
前記第二変形画像および前記第三変形画像の前記撮像範囲の重複する部分において互いの特徴量が対応する特徴点である複数の変形対応点を抽出し、
前記複数の変形対応点の位置を前記第三撮像画像における位置に変換し、または前記複数の撮像対応点の位置を前記第三変形画像における位置に変換することで、前記複数の撮像対応点および前記複数の変形対応点の座標系を揃え、
前記第二撮像装置の外部パラメータが確定した後に、座標系が揃った前記複数の撮像対応点および前記複数の変形対応点に基づいて前記第二撮像装置に対する前記第三撮像装置の位置関係を特定し、前記第二撮像装置の外部パラメータと前記第二撮像装置に対する前記第三撮像装置の位置関係とに基づいて前記第三撮像装置の外部パラメータを校正する
請求項1または請求項4に記載の作業機械のカメラシステム。
【請求項6】
作業機械の外部を撮像する複数の撮像装置と、コントローラとを備える作業機械のカメラパラメータの校正方法であって、
前記コントローラは、
前記複数の撮像装置が撮像した複数の撮像画像を取得し、
前記複数の撮像画像が互いに連続するように一部を変形することで、複数の変形画像を生成し、
前記複数の撮像画像から互いの特徴量が対応する複数の撮像対応点を抽出し、
前記複数の変形画像から互いの特徴量が対応する複数の変形対応点を抽出し、
前記複数の変形対応点の位置を前記複数の撮像画像の何れか1つにおける位置に変換し、または前記複数の撮像対応点の位置を前記複数の変形画像の何れか1つにおける位置に変換することで、前記複数の撮像対応点および前記複数の変形対応点の座標系を揃え、
座標系が揃った前記複数の撮像対応点および前記複数の変形対応点に基づいて、前記複数の撮像装置の少なくとも1つの外部パラメータを校正する
作業機械のカメラパラメータの校正方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械のカメラシステムおよびカメラパラメータの校正方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、車両に搭載された複数のカメラについて構成を行う技術が開示されている。特許文献1に記載の技術によれば、地表に描画された格子の上に車両を停車させ、複数のカメラで撮像された格子の画像に基づいて、各カメラのキャリブレーションがなされる。
【先行技術文献】
【特許文献】
【0003】
特開2013-211707号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、予め格子状のマーカーを用意しておく必要があるため、任意の場所にて校正を行うことが困難であり、校正の精度が低くなる。
本開示の目的は、複数の撮像装置の構成を、目印を用いずに精度よく行うことができる作業機械のカメラシステムおよびカメラパラメータの校正方法を提供することにある。
【課題を解決するための手段】
【0005】
本開示の一態様によれば、作業機械のカメラシステムは、作業機械の外部を撮像し、撮像範囲の一部が互いに重複する第一撮像装置および第二撮像装置と、前記第一撮像装置が撮像した第一撮像画像と前記第二撮像装置が撮像した第二撮像画像と前記第一撮像装置および前記第二撮像装置の外部パラメータに基づいて、表示装置に画像を出力するコントローラと、を備え、前記コントローラは、第一撮像画像および第二撮像画像を取得し、前記第一撮像画像および前記第二撮像画像のそれぞれを、前記撮像範囲の重複する部分が互いに連続するように歪み変形することで、第一変形画像および第二変形画像を生成し、前記第一撮像画像および前記第二撮像画像から、前記撮像範囲の重複する部分において互いの特徴量が対応する複数の特徴点である複数の撮像対応点を抽出し、前記第一変形画像および前記第二変形画像の前記撮像範囲の重複する部分において互いの特徴量が対応する特徴点である複数の変形対応点を抽出し、前記複数の変形対応点の位置を前記第一撮像画像または前記第二撮像画像における位置に変換し、または前記複数の撮像対応点の位置を前記第一変形画像または前記第二撮像画像における位置に変換することで、前記複数の撮像対応点および前記複数の変形対応点の座標系を揃え、座標系が揃った前記複数の撮像対応点および前記複数の変形対応点に基づいて、前記外部パラメータを校正する。
【発明の効果】
【0006】
上記態様によれば、カメラシステムは、複数の撮像装置の構成を、目印を用いずに精度よく行うことができる。
【図面の簡単な説明】
【0007】
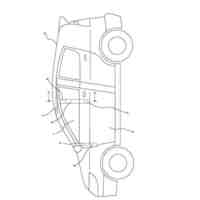
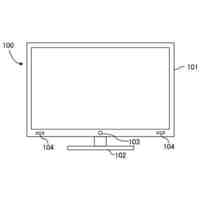
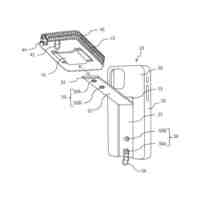
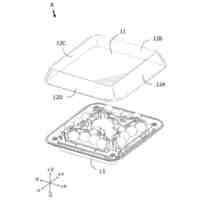
第1の実施形態に係る作業機械の外観を示す斜視図である。
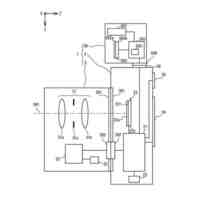
第1の実施形態に係る作業機械の内部構成を示す概略図である。
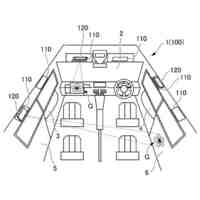
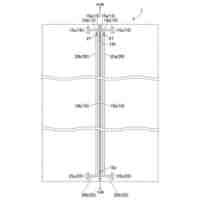
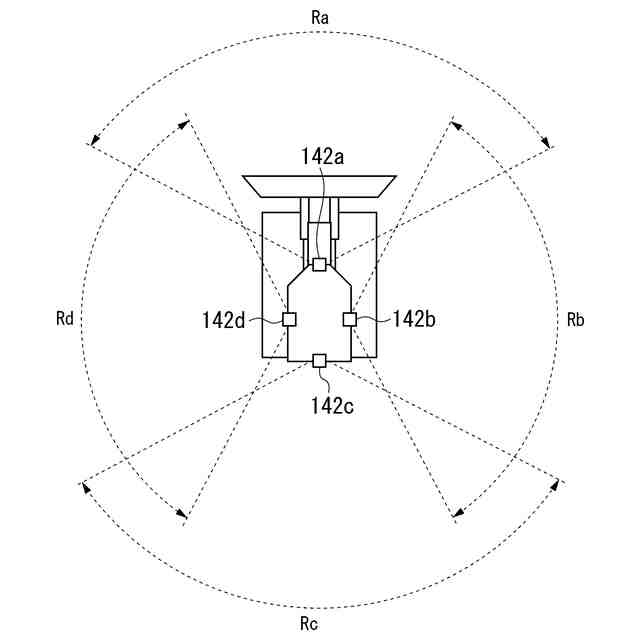
第1の実施形態に係る作業機械が備える複数の撮像装置の撮像範囲を示す図である。
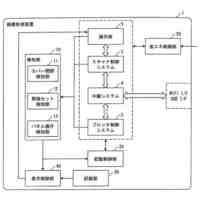
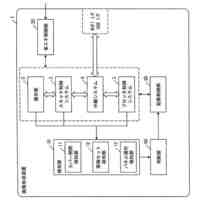
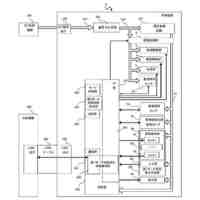
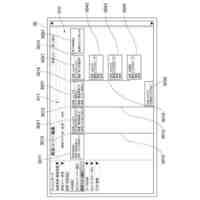
第1の実施形態に係るコントローラの構成を示す概略ブロック図である。
第1の実施形態に係る撮像画像の変形の例を示す図である。
第1の実施形態に係る撮像対応点および変形対応点の例を示す図である。
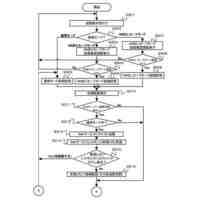
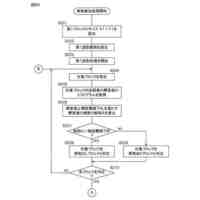
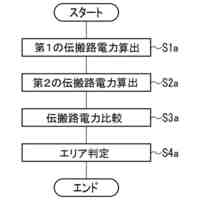
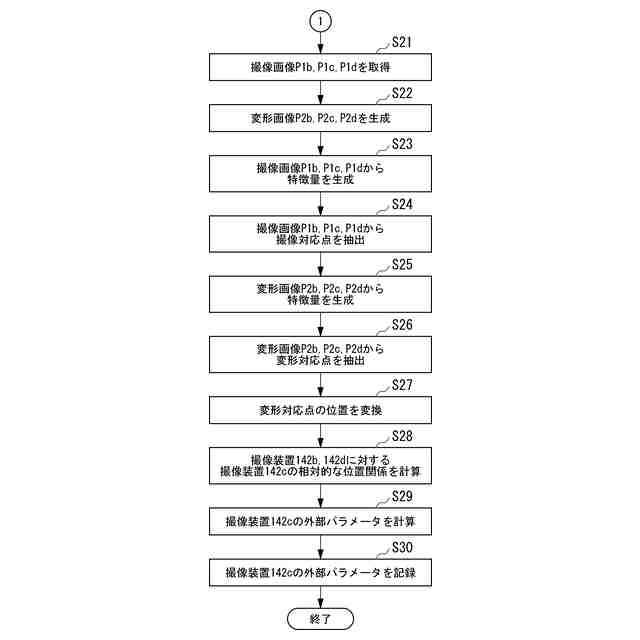
第1の実施形態に係るコントローラによる撮像装置の外部パラメータの校正処理を示すフローチャート(パート1)である。
第1の実施形態に係るコントローラによる撮像装置の外部パラメータの校正処理を示すフローチャート(パート2)である。
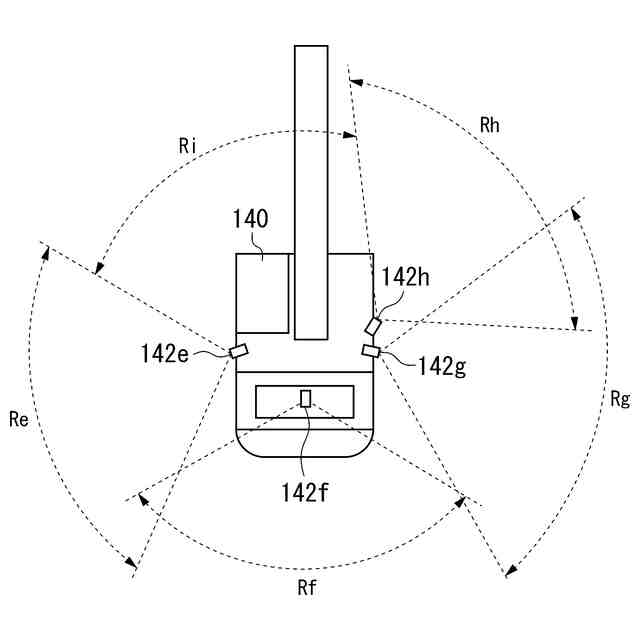
他の実施形態に係る作業機械が備える複数の撮像装置の撮像範囲を示す図である。
【発明を実施するための形態】
【0008】
〈第1の実施形態〉
《作業機械100の構成》
以下、図面を参照しながら実施形態について詳しく説明する。
図1は、第1の実施形態に係る作業機械の外観を示す斜視図である。
第1の実施形態に係る作業機械100は、例えばブルドーザである。作業機械100は、車体110、走行装置120、作業機130、運転室140を備える。
【0009】
走行装置120は、車体110の下部に設けられる。走行装置120は、一対のクローラ121を備える。左右のクローラ121がそれぞれ回転することで、作業機械100が走行する。
作業機130は、土砂等の掘削対象の掘削および運搬に用いられる。作業機130は、土砂を押すためのブレード131と、ブレード131を上下に駆動させるリフトシリンダ132とを有する。ブレードは車体110の前方に配置される。
【0010】
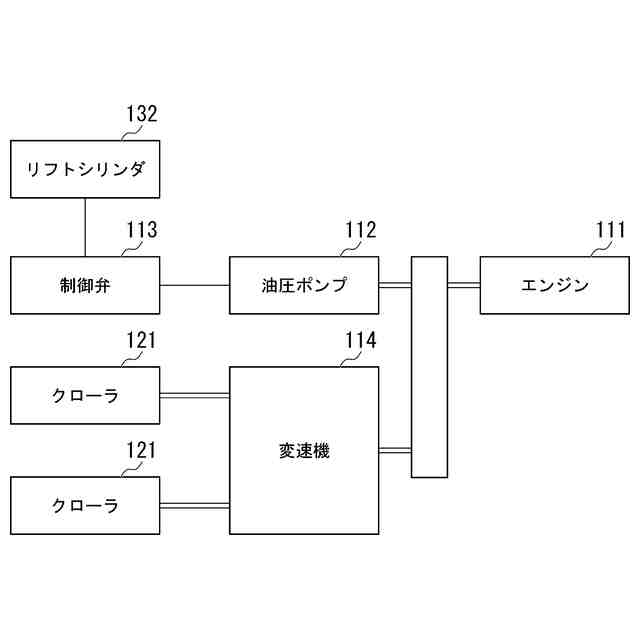
図2は、第1の実施形態に係る作業機械の内部構成を示す概略図である。
作業機械100の車体110は、エンジン111、油圧ポンプ112、制御弁113、変速機114を備える。
エンジン111は、油圧ポンプ112を駆動する原動機である。油圧ポンプ112は、エンジン111により駆動され、作動油を吐出する可変容量ポンプである。制御弁113は、油圧ポンプ112から供給される作動油の流量を制御する。リフトシリンダ132は、油圧ポンプ112から供給され、制御弁113によって流量が制御された作動油によって駆動する。
変速機114は、エンジン111の駆動力を走行装置120に伝達する。変速機114の例としては、HST(Hydraulic Static Transmission)やトルクコンバータが挙げられる。変速機114は、走行装置120の左右のクローラ121を独立して回転させる。例えば、作業機械100は、左右のクローラ121それぞれに別個の変速機114を備えてもよいし、1つの変速機114から伝達される動力を差動装置によって左右のクローラ121それぞれに振り分けてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
店内配信予約システム
1か月前
サクサ株式会社
中継装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
キヤノン株式会社
撮像装置
2か月前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
電子機器
1か月前
株式会社リコー
画像形成装置
13日前
キヤノン電子株式会社
画像読取装置
今日
ヤマハ株式会社
信号処理装置
2か月前
日本精機株式会社
画像投映システム
2か月前
キヤノン電子株式会社
モバイル装置
2か月前
電気興業株式会社
無線中継器
2か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
9日前
ブラザー工業株式会社
読取装置
28日前
キヤノン株式会社
画像表示装置
3か月前
リオン株式会社
電気機械変換器
3か月前
株式会社ニコン
撮像装置
1か月前
キヤノン株式会社
通信システム
3か月前
キヤノン株式会社
画像処理装置
3か月前
キヤノン電子株式会社
シート材搬送装置
29日前
シャープ株式会社
表示装置
3か月前
キヤノン電子株式会社
画像読取システム
3か月前
国立大学法人電気通信大学
小型光学装置
16日前
パテントフレア株式会社
水中電波通信法
1か月前
株式会社クーネル
音響装置
3か月前
DXO株式会社
情報処理システム
1か月前
株式会社松平商会
携帯機器カバー
2日前
株式会社小糸製作所
画像照射装置
8日前
エルメック株式会社
信号伝送回路
3か月前
パテントフレア株式会社
超高速電波通信
7日前
株式会社リコー
画像形成装置
20日前
個人
外部ヘッダ変換通信装置および通信網
2か月前
株式会社オーディオテクニカ
受光器
2か月前
日本無線株式会社
無線通信システム
22日前
日本無線株式会社
無線通信システム
15日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ