TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110804
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004856
出願日
2024-01-16
発明の名称
撮像装置
出願人
株式会社ニコン
代理人
個人
,
個人
主分類
H04N
23/60 20230101AFI20250722BHJP(電気通信技術)
要約
【課題】 対象物が高速で移動しても対象物にピントを合わせ続けることが可能な撮像装置を提供する。
【解決手段】 撮像装置は、光を発光する発光部と、前記発光部で発光された光が対象物によって反射した光を受光する受光部と、前記受光部の受光結果に基づいて、前記対象物までの距離に関する情報を生成する生成部と、を有する測距装置と、フォーカスレンズを有する光学系を通過した光を受光して信号を出力する撮像素子と、前記測距装置及び前記撮像素子を制御する制御部と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
光を発光する発光部と、前記発光部で発光された光が対象物によって反射した光を受光する受光部と、前記受光部の受光結果に基づいて、前記対象物までの距離に関する情報を生成する生成部と、を有する測距装置と、
フォーカスレンズを有する光学系を通過した光を受光して信号を出力する撮像素子と、
前記測距装置及び前記撮像素子を制御する制御部と、を備える撮像装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記受光部が受光を開始又は終了するタイミングと、前記撮像素子が受光を開始又は終了するタイミングとが異なるように前記測距装置及び前記撮像素子の少なくとも一方を制御する、請求項1に記載の撮像装置。
【請求項3】
前記撮像素子は、前記光学系の焦点検出に用いる信号を出力する画素を有し、
前記制御部は、前記受光部が受光を開始又は終了するタイミングと、前記画素が受光を開始又は終了するタイミングとが異なるように制御する、請求項2に記載の撮像装置。
【請求項4】
前記制御部は、前記フォーカスレンズの移動を開始すると、前記フォーカスレンズが移動していない間に前記測距装置において生成された前記対象物までの距離に関する情報に基づいて、前記フォーカスレンズの位置を制御する、請求項3に記載の撮像装置。
【請求項5】
前記制御部は、前記信号に基づいて前記フォーカスレンズの位置を制御するとともに、前記対象物までの距離に関する情報に基づいて前記フォーカスレンズの位置を制御する、請求項3に記載の撮像装置。
【請求項6】
前記制御部は、前記対象物までの距離に関する情報に基づく前記フォーカスレンズの移動量が所定範囲内である場合に、前記フォーカスレンズの位置を制御する、請求項5に記載の撮像装置。
【請求項7】
前記制御部は、前記信号に基づく前記フォーカスレンズの移動目標位置を用いて、前記対象物までの距離に関する情報に基づく前記フォーカスレンズの移動目標位置を較正する、請求項3に記載の撮像装置。
【請求項8】
前記制御部は、前記フォーカスレンズの移動目標位置の較正に用いる前記対象物までの距離に関する情報を得るために前記受光部が受光する期間と、前記信号を得るために前記撮像素子が受光する期間と、が重複するよう前記測距装置及び前記撮像素子を制御する、請求項7に記載の撮像装置。
【請求項9】
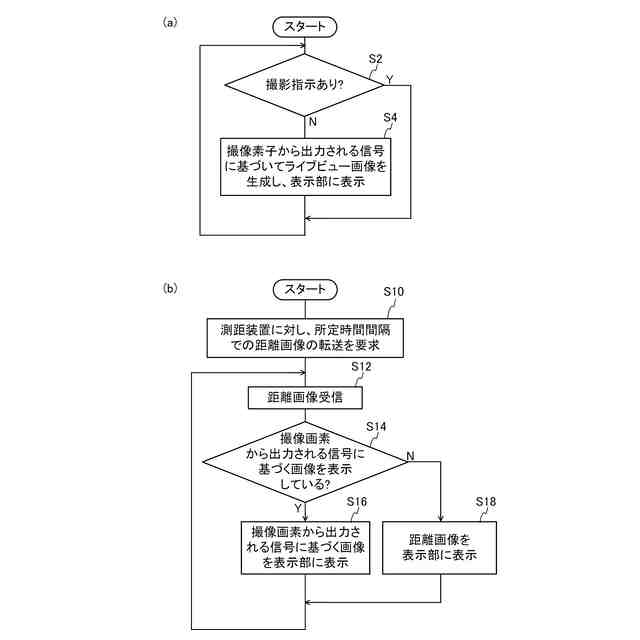
前記撮像素子から出力された信号に基づいて生成された画像及び前記対象物までの距離に関する情報に基づく画像の少なくとも一方を表示する表示部を備える請求項1~8のいずれか一項に記載の撮像装置。
【請求項10】
前記表示部は、前記撮像素子から出力された信号に基づいて生成された画像を表示していない期間に、前記対象物までの距離に関する情報に基づく画像を表示する、請求項9に記載の撮像装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
撮像装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
対象物までの距離を測距するTOFセンサにより測距された距離に基づいて、フォーカスレンズの位置を調整することで、合焦制御を実行する撮像装置が提案されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-32990号公報
【発明の概要】
【0004】
開示の態様によれば、撮像装置は、光を発光する発光部と、前記発光部で発光された光が対象物によって反射した光を受光する受光部と、前記受光部の受光結果に基づいて、前記対象物までの距離に関する情報を生成する生成部と、を有する測距装置と、フォーカスレンズを有する光学系を通過した光を受光して信号を出力する撮像素子と、前記測距装置及び前記撮像素子を制御する制御部と、を備える。
【0005】
なお、後述の実施形態の構成を適宜改良してもよく、また、少なくとも一部を他の構成物に代替させてもよい。更に、その配置について特に限定のない構成要件は、実施形態で開示した配置に限らず、その機能を達成できる位置に配置することができる。
【図面の簡単な説明】
【0006】
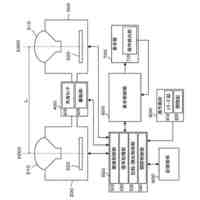
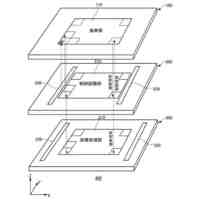
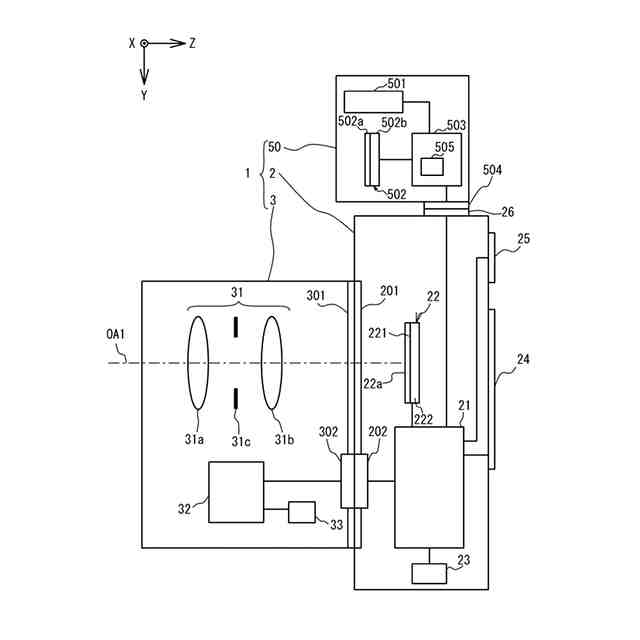
図1は、第1の実施形態に係るカメラの構成を示す図である。
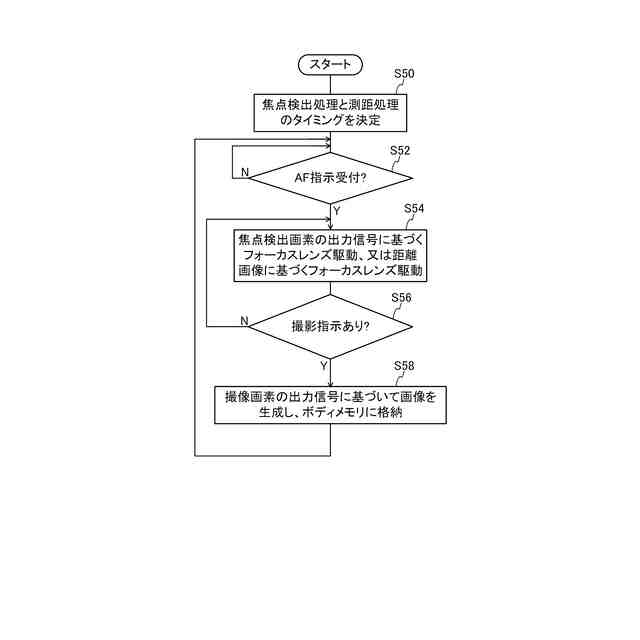
図2(a)、図2(b)は、第1の実施形態におけるカメラボディのボディ制御部が実行する処理の一例を示すフローチャートである。
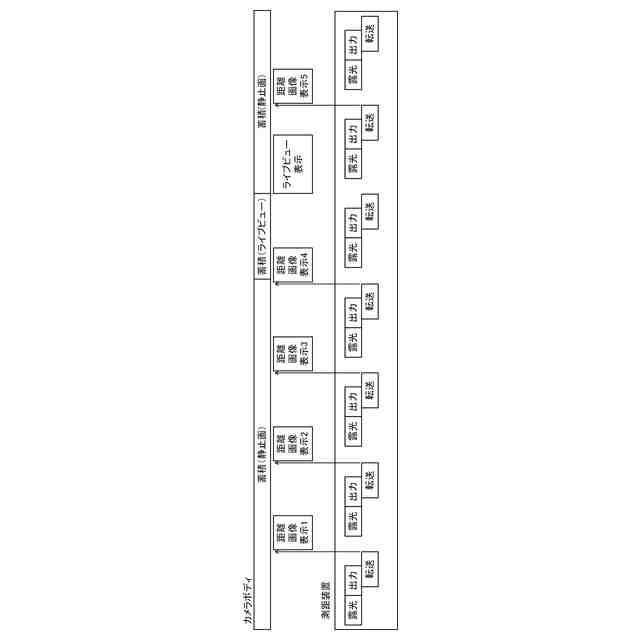
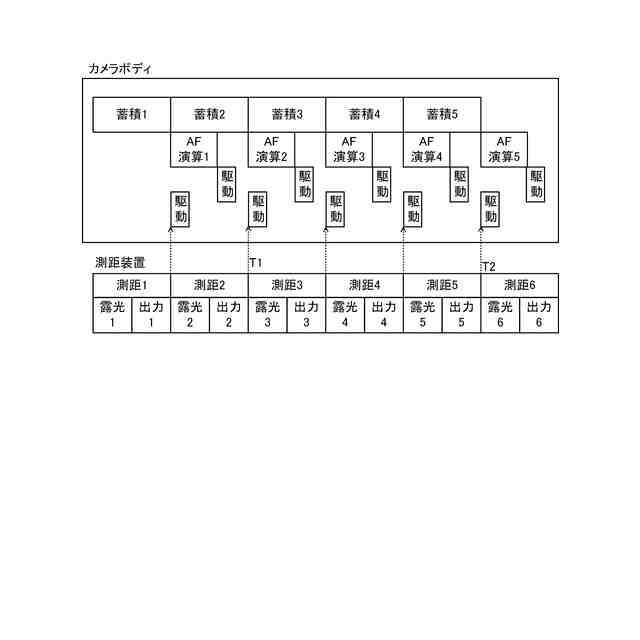
図3は、第1の実施形態における、カメラボディと測距装置の処理タイミングを示すタイミングチャートである。
図4は、第2の実施形態におけるボディ制御部の処理の流れを示すフローチャートである。
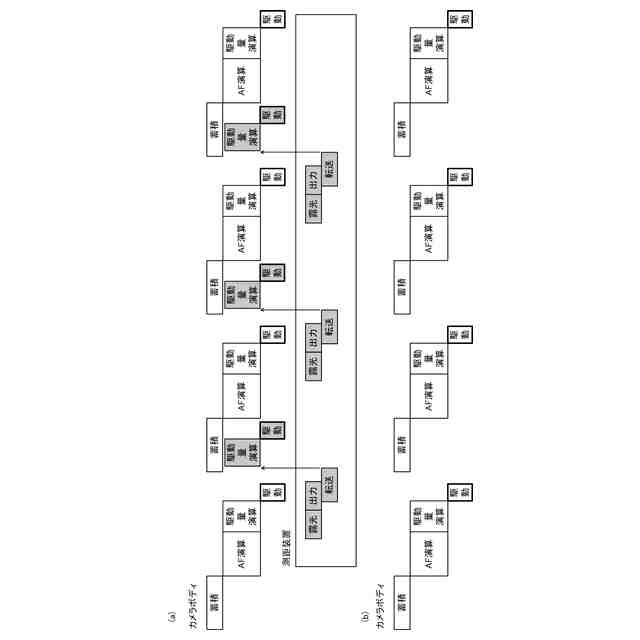
図5(a)は、第2の実施形態におけるカメラボディと測距装置の処理タイミングを示すタイミングチャートであり、図5(b)は比較例を示す図である。
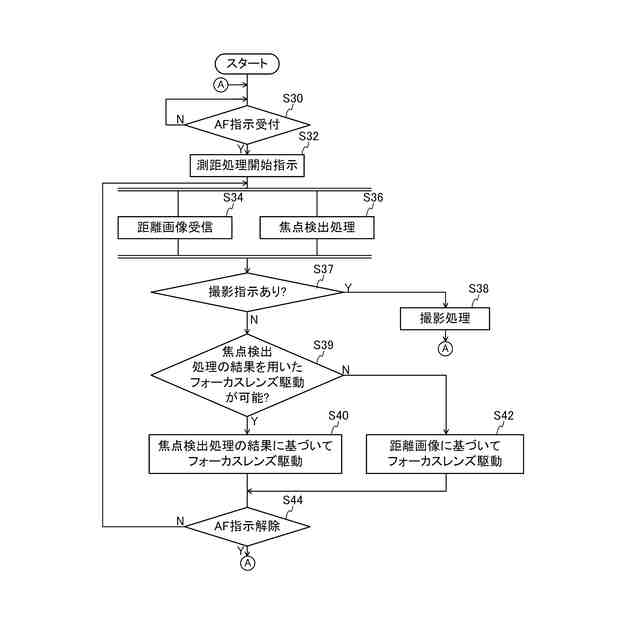
図6は、第3の実施形態のボディ制御部によるフォーカスレンズの駆動制御を示すフローチャートである。
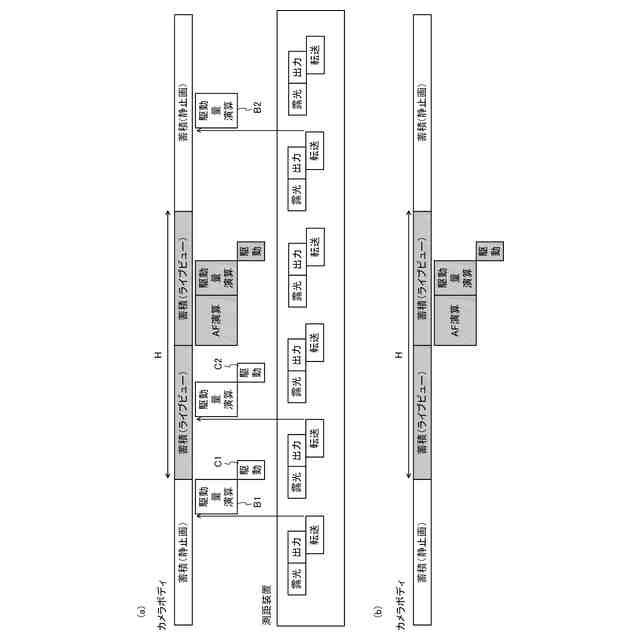
図7(a)は、第3の実施形態におけるカメラボディと測距装置の処理タイミングを示すタイミングチャートであり、図7(b)は比較例を示す図である。
図8は、第4の実施形態におけるカメラボディと測距装置の処理タイミングを示すタイミングチャートである。
図9は、第4の実施形態において、測距処理の結果を用いてフォーカスレンズの駆動量演算を行う前にボディ制御部が実行する処理を示すフローチャートである。
図10は、第4の実施形態の概要を示す図である。
図11は、第4の実施形態の変形例1の概要を示す図である。
図12は、第4の実施形態の変形例2の概要を示す図である。
図13は、第4の実施形態の変形例2において、測距処理の結果を用いてフォーカスレンズの駆動量演算を行う前にボディ制御部が実行する処理を示すフローチャートである。
図14は、第5の実施形態における処理の概要を示す図である。
図15は、第5の実施形態の変形例における処理の概要を示す図である。
【発明を実施するための形態】
【0007】
《第1の実施形態》
以下、第1の実施形態に係る、撮像装置の一例であるデジタルカメラ1(以下、カメラ1と称する)について、図1~図3を参照して説明する。
【0008】
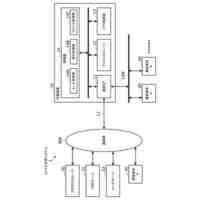
図1は、第1の実施形態に係るカメラ1の構成を示す図である。カメラ1は、カメラボディ2と、交換レンズ3と、測距装置50と、を備える。
【0009】
(測距装置50)
測距装置50は、例えば、レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形・大きさなどを計測するLiDAR(Light Detection And Ranging)を利用した測距装置である。測距装置50は、発光部501と、受光部502と、制御部503と、測距装置側コネクタ部504と、を備える。
【0010】
発光部501は、例えば、VCSEL(垂直共振器型面発光レーザー)であり、近赤外等のレーザー光を対象領域に向けて射出する。ここで、対象領域とは、測距装置50の撮像範囲に相当する領域であり、測距装置50の画角に応じた領域である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ニコン
撮像装置
1か月前
株式会社ニコン
撮像装置
1か月前
株式会社ニコン
撮像素子
1か月前
株式会社ニコン
撮像素子
24日前
株式会社ニコン
撮像素子
22日前
株式会社ニコン
カメラボディ
1か月前
株式会社ニコン
カメラシステム
3日前
株式会社ニコン
光学系および光学機器
1か月前
株式会社ニコン
撮像素子及び撮像装置
3日前
株式会社ニコン
撮像素子および撮像装置
22日前
株式会社ニコン
撮像素子および撮像装置
11日前
株式会社ニコン
撮像素子および撮像装置
24日前
株式会社ニコン
眼科装置及び眼科撮影方法
24日前
株式会社ニコン
眼科用光学系及び眼科装置
11日前
株式会社ニコン
撮像ユニットおよび撮像装置
3日前
株式会社ニコン
加工システム及び検査システム
1か月前
株式会社ニコン
リレー光学系、及びアタッチメント
11日前
株式会社ニコン
フォトマスク用基板の製造方法、フォトマスクブランクスの製造方法、フォトマスクの製造方法、フォトマスク用基板の再利用方法、フォトマスク用基板、フォトマスクブランクス、フォトマスク、石英ガラス基板の加工装置
25日前
株式会社ニコン
フッ化バリウム焼結体、フッ化ランタンドープフッ化バリウム焼結体、フッ化バリウム粒子の製造方法、フッ化バリウム焼結体の製造方法、フッ化ランタンドープフッ化バリウム粒子の製造方法、フッ化ランタンドープフッ化バリウム焼結体の製造方法、光学素子、光学系、交換レンズおよび光学装置
24日前
個人
イヤーピース
22日前
個人
イヤーマフ
1か月前
個人
監視カメラシステム
1か月前
個人
スイッチシステム
1か月前
キーコム株式会社
光伝送線路
1か月前
WHISMR合同会社
収音装置
2か月前
サクサ株式会社
中継装置
1か月前
個人
スキャン式車載用撮像装置
1か月前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
撮像装置
3か月前
キヤノン株式会社
撮像装置
1日前
アイホン株式会社
電気機器
2か月前
キヤノン電子株式会社
画像読取装置
22日前
キヤノン電子株式会社
画像読取装置
1か月前
ヤマハ株式会社
放音制御装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ