TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134297
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032121
出願日
2024-03-04
発明の名称
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
3/84 20060101AFI20250909BHJP(水工;基礎;土砂の移送)
要約
【課題】識別用マーカを用いてドローバの姿勢を算出可能なモータグレーダを提供する。
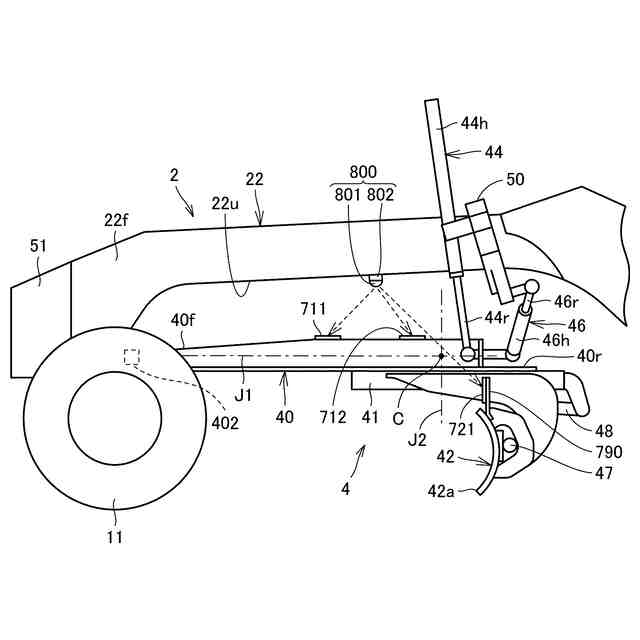
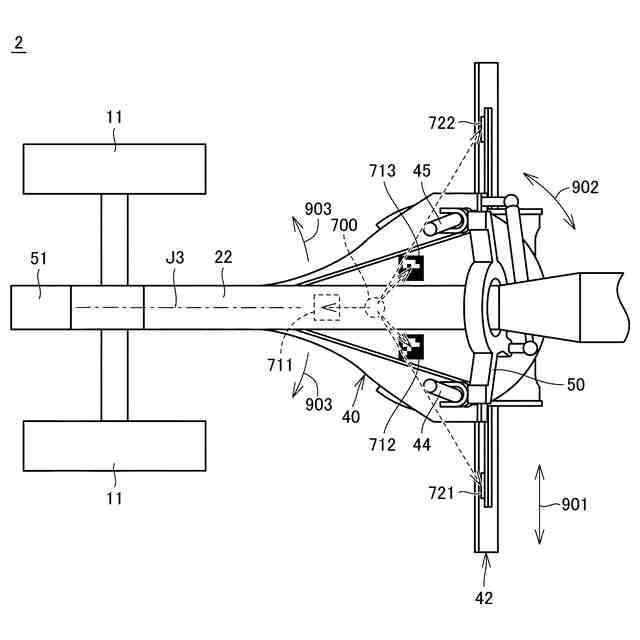
【解決手段】モータグレーダは、フロントフレームと、フロントフレームに揺動可能に取り付けられたドローバと、ドローバに取り付けられた第1の識別用マーカと、フロントフレームに取り付けられ、かつ、第1の識別用マーカを撮像するカメラと、撮像により得られた第1の識別用マーカの第1の画像データに基づいて、カメラに対するドローバの第1の姿勢を算出するコントローラとを備える。
【選択図】図2
特許請求の範囲
【請求項1】
フロントフレームと、
前記フロントフレームに揺動可能に取り付けられたドローバと、
前記ドローバに取り付けられた第1の識別用マーカと、
前記フロントフレームに取り付けられ、かつ、前記第1の識別用マーカを撮像するカメラと、
前記撮像により得られた前記第1の識別用マーカの第1の画像データに基づいて、前記カメラに対する前記ドローバの第1の姿勢を算出するコントローラとを備える、モータグレーダ。
続きを表示(約 1,200 文字)
【請求項2】
前記ドローバに旋回可能に取り付けられた旋回サークルと、
前記旋回サークルに支持されたブレードと、
前記ブレードに取り付けられた第2の識別用マーカとをさらに備え、
前記カメラは、前記第1の識別用マーカと前記第2の識別用マーカとを撮像し、
前記コントローラは、前記撮像により得られた前記第2の識別用マーカの第2の画像データとに基づいて、前記カメラに対する前記ブレードの姿勢を算出する、請求項1に記載のモータグレーダ。
【請求項3】
前記ブレードは、刃先を備え、
前記コントローラは、前記カメラに対する前記ドローバの第1の姿勢と、前記カメラに対する前記ブレードの姿勢とに基づき、前記カメラに対する前記刃先の位置を算出する、請求項2に記載のモータグレーダ。
【請求項4】
前記ドローバの前方において前記ドローバを前記フロントフレームに対して揺動可能に連結する連結部材をさらに備え、
前記コントローラは、前記カメラに対する前記刃先の位置に基づき、前記連結部材に対する前記刃先の位置を算出する、請求項3に記載のモータグレーダ。
【請求項5】
前記フロントフレームは、前記ドローバと対向する下端面を有し、
前記カメラは、前記下端面に取り付けられている、請求項1から4のいずれか1項に記載のモータグレーダ。
【請求項6】
前記カメラは超広角レンズを有する、請求項5に記載のモータグレーダ。
【請求項7】
前記第1の識別用マーカは、前記ドローバの上面に設置されている、請求項1に記載のモータグレーダ。
【請求項8】
前記第2の識別用マーカは、前記ブレードの上方に設置されている、請求項2に記載のモータグレーダ。
【請求項9】
前記コントローラは、
前記カメラに対する前記ドローバの第1の姿勢と、前記カメラに対する前記ブレードの姿勢とに基づき、前記ブレードのシフト量と前記ブレードのチルト量とを算出し、
前記カメラに対する前記ブレードの姿勢と、前記ブレードのシフト量と、前記ブレードのチルト量とに基づき、前記カメラに対する前記ドローバの第2の姿勢を算出する、請求項1から4のいずれか1項に記載のモータグレーダ。
【請求項10】
モータグレーダのドローバ姿勢算出方法であって、
フロントフレームに揺動可能に連結されたドローバに取り付けられた識別用マーカを、前記フロントフレームに取り付けられたカメラで撮像するステップと、
前記撮像により得られた前記識別用マーカの画像データに基づいて、前記カメラに対する前記ドローバの姿勢を算出するステップとを備える、モータグレーダのドローバ姿勢算出方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータグレーダおよびモータグレーダのドローバ姿勢算出方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、モータグレーダが知られている。モータグレーダは、旋回サークルが取り付けられたドローバを備える。旋回サークルには、ブレードが取り付けられている。
【0003】
米国特許出願公開第2018/0061040A1号明細書(特許文献1)には、上記ブレードをトラッキング可能なモータグレーダが開示されている。具体的には、特許文献1のモータグレーダは、ブレードに動作可能に結合された第1および第2の光学ターゲットと、第1の視野内の第1の光学ターゲットの第1の撮像データを収集する第1のカメラと、第2の視野内で第2の光学ターゲットの第2の撮像データを収集する第2のカメラと、第1または第2の撮像データの少なくとも一方を選択するセレクタと、選択された撮像データに基づいてブレードの向きを決定するプロセッサとを備える。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2018/0061040A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のモータグレーダでは、複数の光学ターゲット(識別用マーカ)を別々のカメラで撮像することにより、ブレードの姿勢を求めている。これに限らず、ブレードの姿勢は、ドローバの姿勢から比較的容易に求めることができる。よって、ドローバの姿勢を算出できれば、ブレードの姿勢を求めることができる。
【0006】
本開示は、識別用マーカを用いてドローバの姿勢を算出可能なモータグレーダおよびモータグレーダのドローバ姿勢算出方法を提供する。
【課題を解決するための手段】
【0007】
本開示の一態様に係るモータグレーダは、フロントフレームと、フロントフレームに揺動可能に取り付けられたドローバと、ドローバに取り付けられた第1の識別用マーカと、フロントフレームに取り付けられ、かつ、第1の識別用マーカを撮像するカメラと、撮像により得られた第1の識別用マーカの第1の画像データに基づいて、カメラに対するドローバの第1の姿勢を算出するコントローラとを備える。
【発明の効果】
【0008】
上記の構成によれば、識別用マーカを用いてドローバの姿勢を算出可能となる。
【図面の簡単な説明】
【0009】
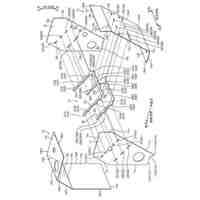
モータグレーダの構成を概略的に示す斜視図である。
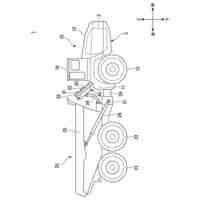
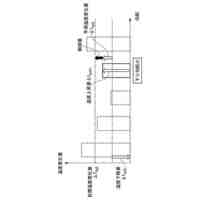
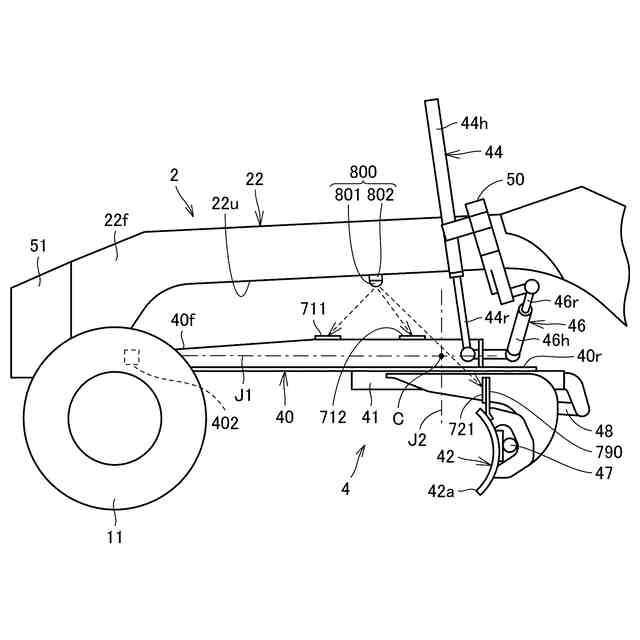
モータグレーダのフロントフレーム側の側面図である。
図2の状態におけるモータグレーダのフロントフレーム側の平面図である。
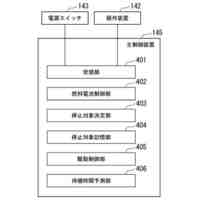
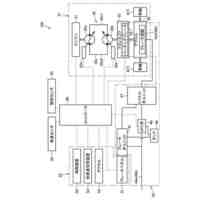
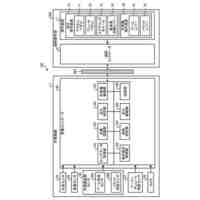
モータグレーダの機能的構成を説明するブロック図である。
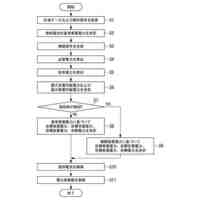
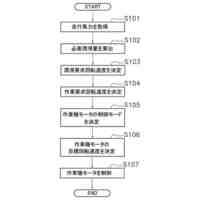
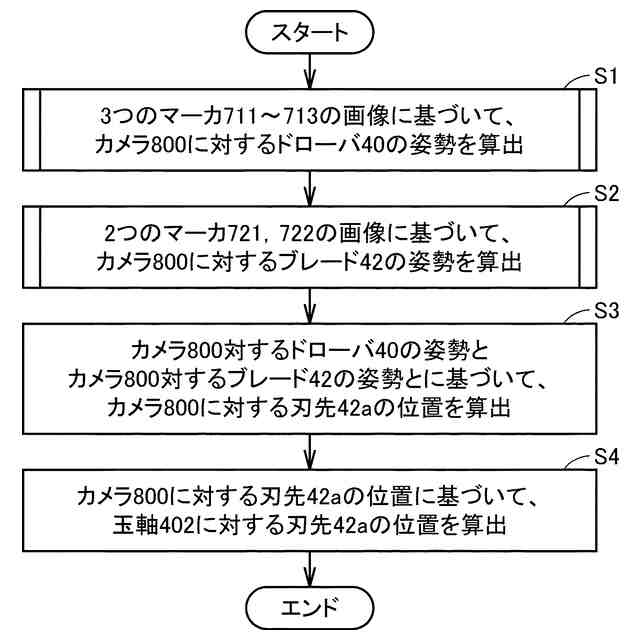
ブレードの刃先の位置を算出するためのフロー図である。
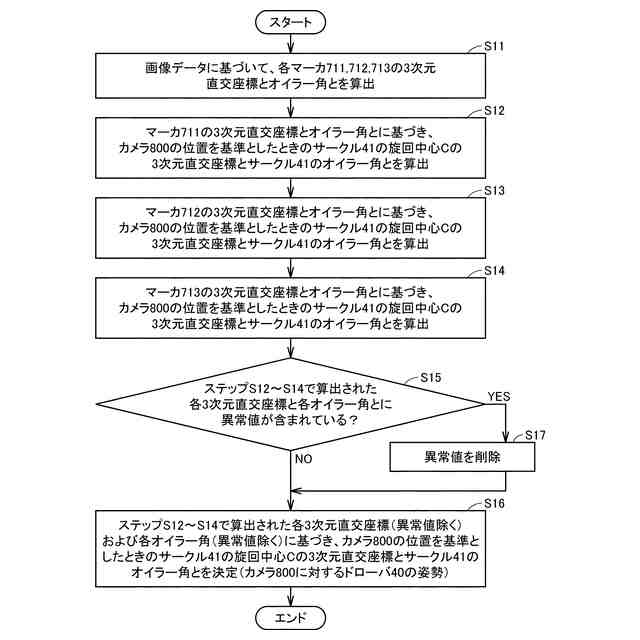
図5のステップS1の処理の詳細を示したフロー図である。
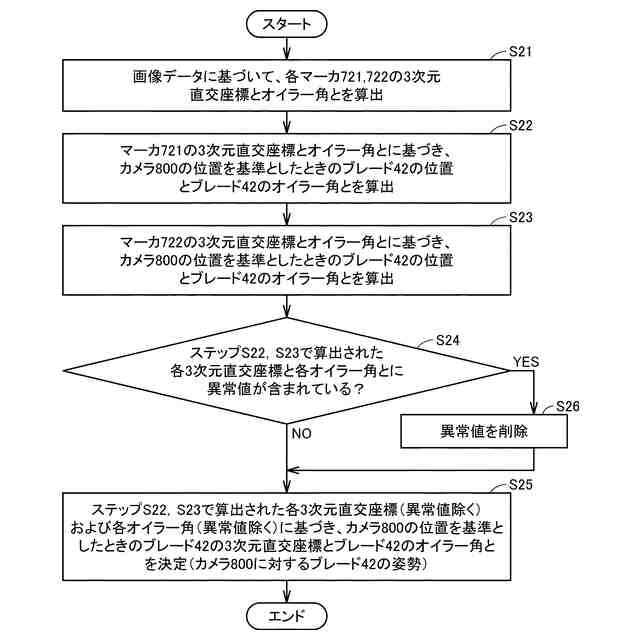
図5のステップS2の処理の詳細を示したフロー図である。
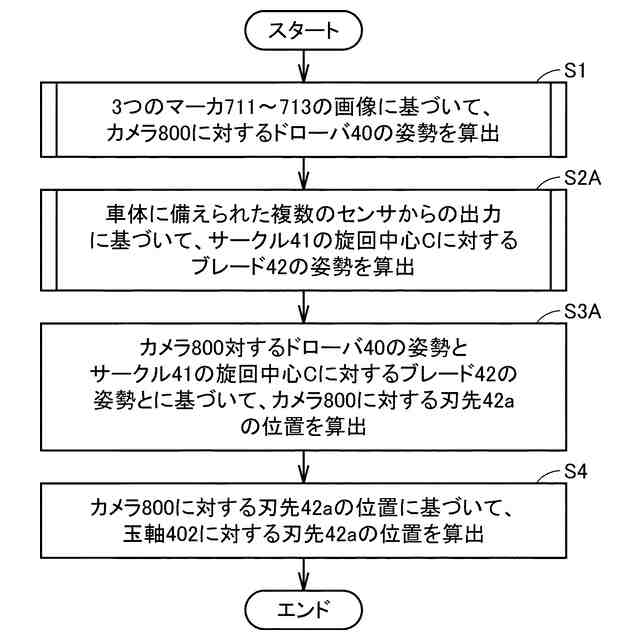
ブレードの刃先の位置を算出するための本変形例でのフロー図である。
図8のステップS2Aの処理の詳細を示したフロー図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態に係るモータグレーダについて、図に基づいて説明する。以下の説明では、同一部品には、同一の符号を付している。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
11日前
株式会社小松製作所
作業機械および方法
1日前
株式会社小松製作所
作業機械および方法
今日
株式会社小松製作所
作業機械および方法
今日
株式会社小松製作所
作業機械および方法
今日
株式会社小松製作所
発注システムおよび発注方法
2日前
株式会社小松製作所
発注システムおよび発注方法
2日前
株式会社小松製作所
作業車両および作業車両の制御方法
今日
株式会社小松製作所
作業機械および作業機械の制御方法
今日
株式会社小松製作所
作業車両用作動油タンク及び作業車両
8日前
株式会社小松製作所
作業車両の制御システム及び作業車両
今日
株式会社小松製作所
システム、作業機械、および制御方法
今日
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
1日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
今日
株式会社小松製作所
作業機械、及び、作業機械を制御するための方法
3日前
株式会社小松製作所
散水システム、作業機械および散水装置の制御方法
2日前
株式会社小松製作所
散水システム、散水機械および散水装置の制御方法
2日前
株式会社小松製作所
感情推定装置、感情推定方法および遠隔操作システム
3日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
2日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
2日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
今日
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
1日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
9日前
株式会社小松製作所
作業機械の表示システム、作業機械、及び作業機械の表示方法
2日前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
今日
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
今日
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
今日
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1日前
個人
鋼管
22日前
FKS株式会社
擁壁
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ