TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127611
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024392
出願日
2024-02-21
発明の名称
作業機械を制御するためのシステム、方法、及び作業機械
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
B62D
6/00 20060101AFI20250826BHJP(鉄道以外の路面車両)
要約
【課題】作業機械による作業の自由度を向上させる。
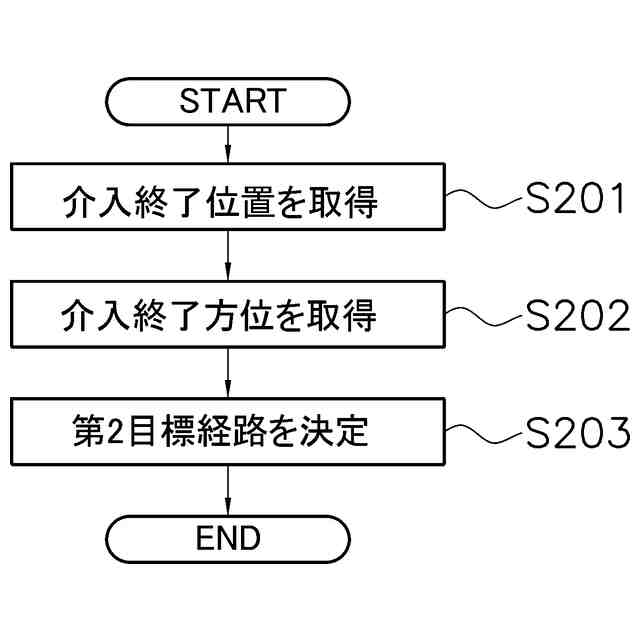
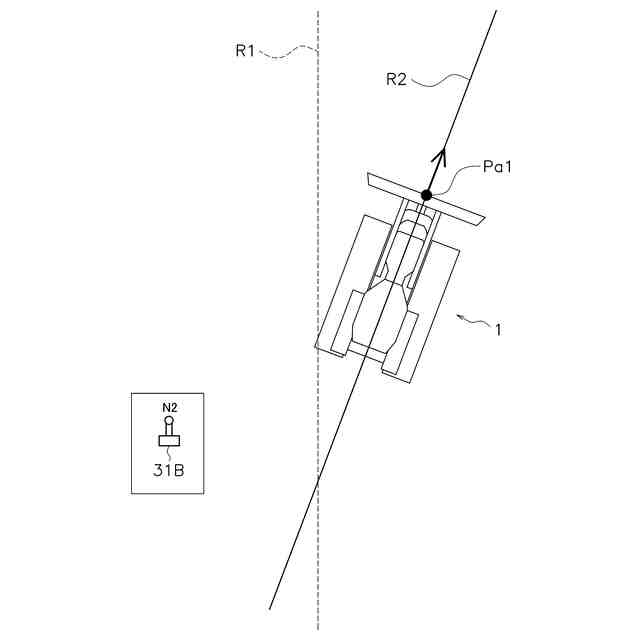
【解決手段】システムは、センサと、ステアリング操作装置と、コントローラとを備える。センサは、作業機械の現在位置を検出する。コントローラは、作業機械の現在位置に基づいて、作業機械が第1目標経路に従って走行するように、自動走行制御により、作業機械を制御する。コントローラは、自動走行制御中に、ステアリング操作装置が介入操作された場合には、自動走行制御を中断してステアリング操作装置への介入操作に応じて、作業機械を旋回させる。コントローラは、ステアリング操作装置への介入操作が終了した場合には、ステアリング操作装置への介入操作が終了したときの作業機械の位置と方位を、それぞれ介入終了位置と介入終了方位として取得する。コントローラは、介入終了位置と介入終了方位とに基づいて、第2目標経路を生成する。
【選択図】図6
特許請求の範囲
【請求項1】
作業機械を制御するためのシステムであって、
前記作業機械の現在位置を検出するセンサと、
前記作業機械を左右に旋回させるために介入操作可能なステアリング操作装置と、
コントローラと、
を備え、
前記コントローラは、
前記作業機械の第1目標経路を取得し、
前記作業機械の現在位置を取得し、
前記作業機械の現在位置に基づいて、前記作業機械が前記第1目標経路に従って走行するように、自動走行制御により、前記作業機械を制御し、
前記自動走行制御中に、前記ステアリング操作装置が介入操作された場合には、前記自動走行制御を中断して前記ステアリング操作装置への介入操作に応じて、前記作業機械を旋回させ、
前記ステアリング操作装置への介入操作が終了した場合には、前記ステアリング操作装置への介入操作が終了したときの前記作業機械の現在位置を、介入終了位置として取得し、
前記ステアリング操作装置への介入操作が終了したときの前記作業機械の方位を、介入終了方位として取得し、
前記介入終了位置と前記介入終了方位とに基づいて、第2目標経路を生成し、
前記作業機械の現在位置に基づいて、前記作業機械が前記第2目標経路に従って走行するように、前記自動走行制御を再開して、前記作業機械を制御する、
システム。
続きを表示(約 1,700 文字)
【請求項2】
前記コントローラは、前記介入終了位置を通り前記介入終了方位に向かって延びる直線状の経路を、前記第2目標経路として生成する、
請求項1に記載のシステム。
【請求項3】
前記ステアリング操作装置は、中立位置から右旋回方向と左旋回方向とに操作可能であり、
前記コントローラは、
前記ステアリング操作装置が前記中立位置に戻ったときの前記作業機械の現在位置を、介入終了位置として取得し、
前記ステアリング操作装置が前記中立位置に戻ったときの前記作業機械の方位を、介入終了方位として取得する、
請求項1に記載のシステム。
【請求項4】
手動操作可能な経路変更スイッチをさらに備え、
前記コントローラは、
前記ステアリング操作装置への介入操作後に前記経路変更スイッチが操作されたときの前記作業機械の現在位置を、介入終了位置として取得し、
前記ステアリング操作装置への介入操作後に前記経路変更スイッチが操作されたときの前記作業機械の方位を、介入終了方位として取得する、
請求項1に記載のシステム。
【請求項5】
前記コントローラは、前記ステアリング操作装置の操作量が閾値以下である場合には、前記第1目標経路を維持する、
請求項1に記載のシステム。
【請求項6】
前記コントローラは、前記作業機械の方位の変化量が閾値以下である場合には、前記第1目標経路を維持する、
請求項1に記載のシステム。
【請求項7】
ディスプレイをさらに備え、
前記コントローラは、
前記第1目標経路を示す第1経路画像と、前記作業機械を示す機械画像とを重ね合わせて、前記ディスプレイに表示し、
前記第2目標経路を生成した場合には、前記第2目標経路を示す第2経路画像と、前記機械画像とを重ね合わせて、前記ディスプレイに表示する、
請求項1に記載のシステム。
【請求項8】
作業機械を制御するための方法であって、
前記作業機械の第1目標経路を取得することと、
前記作業機械の現在位置を取得することと、
前記作業機械の現在位置に基づいて、前記作業機械が前記第1目標経路に従って走行するように、自動走行制御により、前記作業機械を制御することと、
前記作業機械を左右に旋回させるために介入操作可能なステアリング操作信号を受信することと、
前記自動走行制御中に、介入操作された場合には、前記自動走行制御を中断して前記介入操作に応じて、前記作業機械を旋回させることと、
前記介入操作が終了した場合には、前記介入操作が終了したときの前記作業機械の現在位置を、介入終了位置として取得することと、
前記介入操作が終了したときの前記作業機械の方位を、介入終了方位として取得することと、
前記介入終了位置と前記介入終了方位とに基づいて、第2目標経路を生成することと、
前記作業機械の現在位置に基づいて、前記作業機械が前記第2目標経路に従って走行するように、前記自動走行制御を再開して、前記作業機械を制御すること、
を備える方法。
【請求項9】
前記介入終了位置を通り前記介入終了方位に向かって延びる直線状の経路を、前記第2目標経路として生成することを備える、
請求項8に記載の方法。
【請求項10】
中立位置から右旋回方向と左旋回方向とに操作可能なステアリング操作装置から前記ステアリング操作信号を受信することと、
前記ステアリング操作装置が前記中立位置に戻ったときの前記作業機械の現在位置を、介入終了位置として取得することと、
前記ステアリング操作装置が前記中立位置に戻ったときの前記作業機械の方位を、介入終了方位として取得すること、
を備える請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を制御するためのシステム、方法、及び作業機械に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
従来、所定の目標経路に従って走行するように作業機械を制御する自動走行制御が知られている。例えば、特許文献1の作業機械の制御システムでは、互いに平行に延びる複数の目標経路が設定される。制御システムは、作業機械が複数の目標経路に従って、順に走行するように、作業機械を制御する。作業機械は、目標経路に従って走行しながら、掘削などの作業を行う、それにより、作業現場の地形が所望の形状に施工される。
【先行技術文献】
【特許文献】
【0003】
特開2020-166303
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械のオペレータは、作業機械による作業をやり直したい場合などに、目標経路を調整したい場合がある。或いは、目標経路中に障害物が発見された場合などに、作業機械のコントローラによって、目標経路を調整したい場合がある。しかし、上記の制御システムでは、作業機械は、自動走行制御により、予め定められた複数の目標経路に従って、走行する。そのため、作業の自由度が低い。本開示の目的は、作業機械による作業の自由度を向上させることにある。
【課題を解決するための手段】
【0005】
本開示の第1の態様は、作業機械を制御するためのシステムである。当該システムは、センサと、ステアリング操作装置と、コントローラとを備える。センサは、作業機械の現在位置を検出する。ステアリング操作装置は、作業機械を左右に旋回させるために介入操作可能である。コントローラは、作業機械の第1目標経路を取得する。コントローラは、作業機械の現在位置を取得する。コントローラは、作業機械の現在位置に基づいて、作業機械が第1目標経路に従って走行するように、自動走行制御により、作業機械を制御する。コントローラは、自動走行制御中に、ステアリング操作装置が介入操作された場合には、自動走行制御を中断してステアリング操作装置への介入操作に応じて、作業機械を旋回させる。コントローラは、ステアリング操作装置への介入操作が終了した場合には、ステアリング操作装置への介入操作が終了したときの作業機械の位置を、介入終了位置として取得する。コントローラは、ステアリング操作装置への介入操作が終了したときの作業機械の方位を、介入終了方位として取得する。コントローラは、介入終了位置と介入終了方位とに基づいて、第2目標経路を生成する。コントローラは、作業機械の現在位置に基づいて、作業機械が第2目標経路に従って走行するように、自動走行制御を再開して、作業機械を制御する。
【0006】
本開示の第2の態様は、作業機械を制御するための方法である。当該方法は、作業機械の第1目標経路を取得することと、作業機械の現在位置を取得することと、作業機械の現在位置に基づいて、作業機械が第1目標経路に従って走行するように、自動走行制御により、作業機械を制御することと、作業機械を左右に旋回させるために介入操作可能な操作信号を受信することと、自動走行制御中に、介入操作された場合には、自動走行制御を中断して介入操作に応じて、作業機械を旋回させることと、介入操作を終了した場合には、介入操作を終了したときの作業機械の位置を介入終了位置として取得することと、介入操作が終了したときの作業機械の方位を、介入終了方位として取得することと、介入終了位置と介入終了方位とに基づいて、第2目標経路を生成することと、作業機械の現在位置に基づいて、作業機械が第2目標経路に従って走行するように、自動走行制御を再開して、作業機械を制御すること、を備える。
【0007】
本開示の第3の態様は、作業機械であって、センサと、ステアリング操作装置と、コントローラとを備える。センサは、作業機械の現在位置を検出する。ステアリング操作装置は、作業機械を左右に旋回させるために介入操作可能である。コントローラは、作業機械の第1目標経路を取得する。コントローラは、作業機械の現在位置を取得する。コントローラは、作業機械の現在位置に基づいて、作業機械が第1目標経路に従って走行するように、自動走行制御により、作業機械を制御する。コントローラは、自動走行制御中に、ステアリング操作装置が介入操作された場合には、自動走行制御を中断してステアリング操作装置への介入操作に応じて、作業機械を旋回させる。コントローラは、ステアリング操作装置への介入操作を終了した場合には、ステアリング操作装置への介入操作が終了したときの作業機械の位置を、介入終了位置として取得する。コントローラは、ステアリング操作装置への介入操作が終了したときの作業機械の方位を、介入終了方位として取得する。コントローラは、介入終了位置と介入終了方位とに基づいて、第2目標経路を生成する。コントローラは、作業機械の現在位置に基づいて、作業機械が第2目標経路に従って走行するように、自動走行制御を再開して、作業機械を制御する。
【発明の効果】
【0008】
本開示によれば、自動走行制御中に、ステアリング操作装置が介入操作された場合には、自動走行制御を中断してステアリング操作装置への介入操作に応じて、作業機械が旋回する。そのため、作業機械による作業の自由度が高い。また、ステアリング操作装置への介入操作を終了した場合には、介入操作が終了したときの作業機械の位置を示す介入終了位置と、介入操作が終了したときの作業機械の方位を示す介入終了方位とに基づいて、第2目標経路が生成される。そして、作業機械が第2目標経路に従って走行するように、自動走行制御を再開して、作業機械が制御される。
【図面の簡単な説明】
【0009】
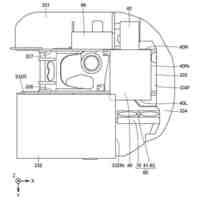
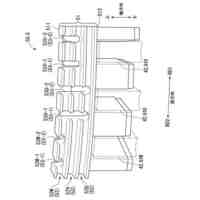
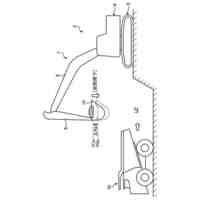
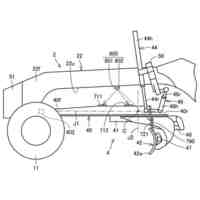
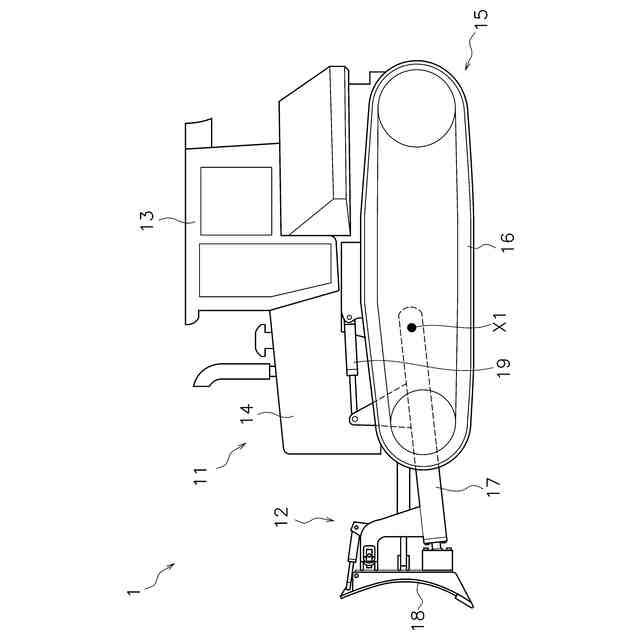
実施形態に係る作業機械を示す側面図である。
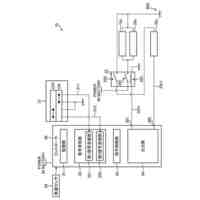
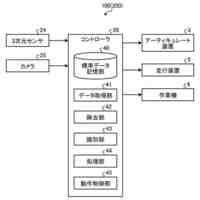
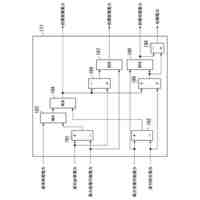
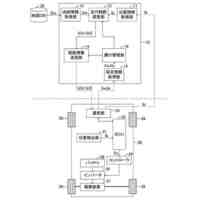
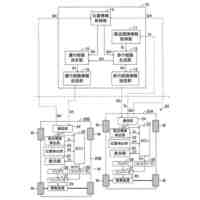
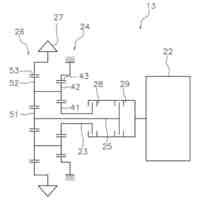
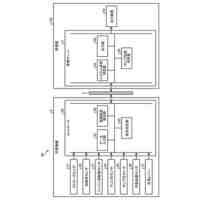
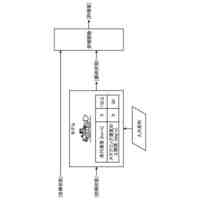
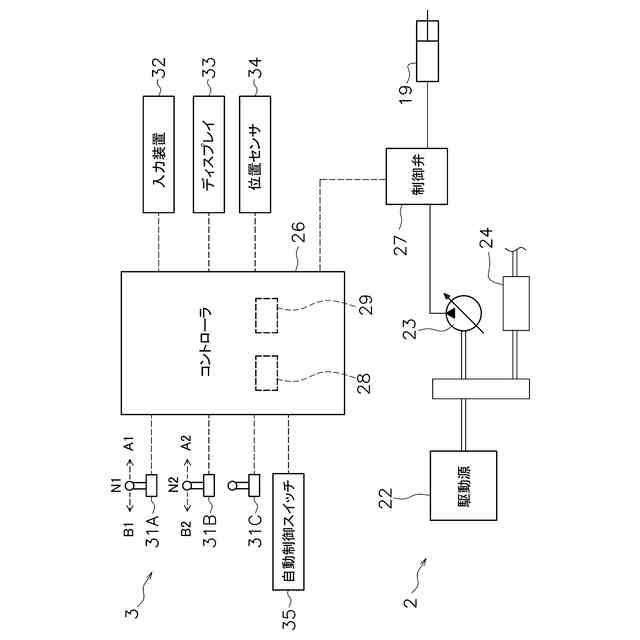
作業機械の駆動系と制御システムとの構成を示すブロック図である。
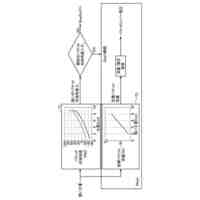
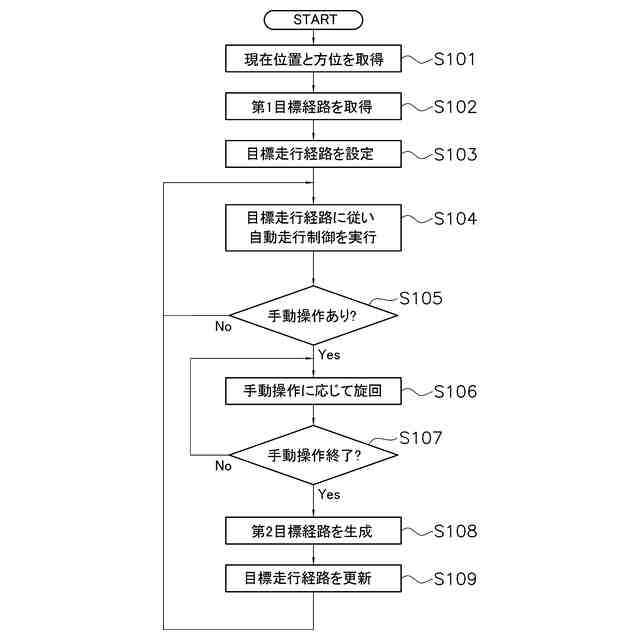
自動走行制御の処理を示すフローチャートである。
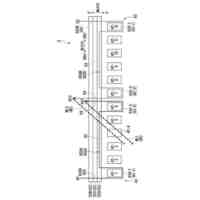
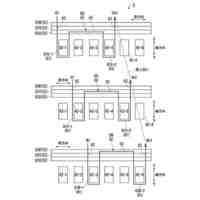
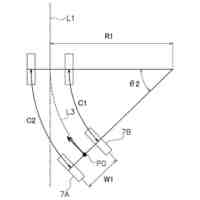
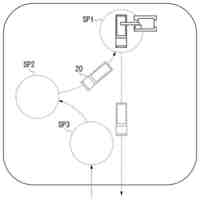
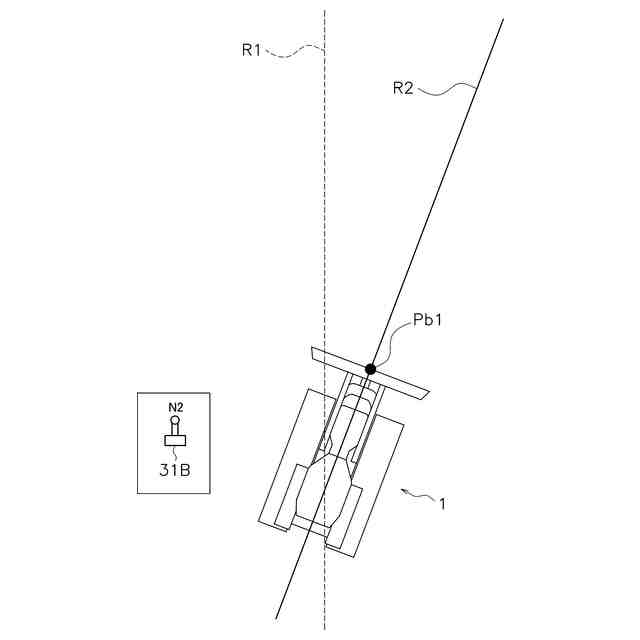
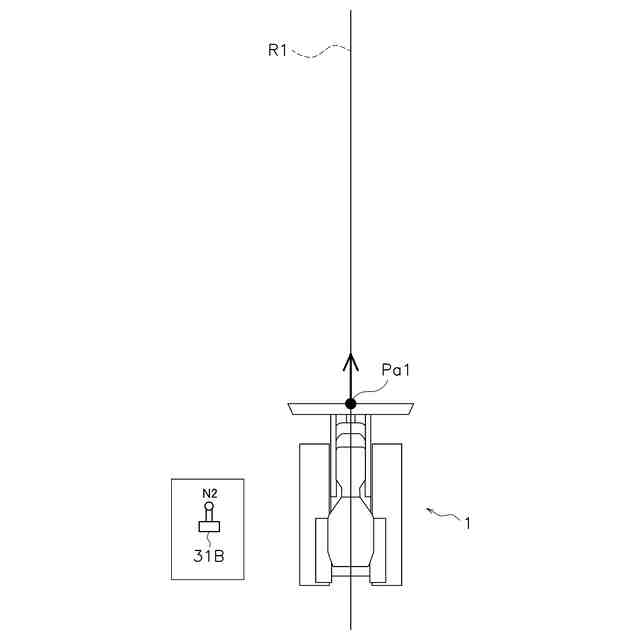
自動走行制御での作業機械と目標走行経路とを示す図である。
自動走行制御での作業機械と目標走行経路とを示す図である。
自動走行制御での作業機械と目標走行経路とを示す図である。
第2目標経路R2を生成するための処理を示すフローチャートである。
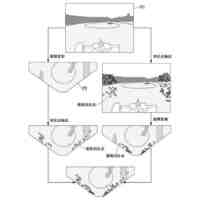
自動走行制御での作業機械と目標走行経路とを示す図である。
自動走行制御での作業機械と目標走行経路とを示す図である。
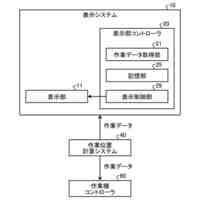
自動走行制御でのガイド画面の一例を示す図である。
自動走行制御でのガイド画面の一例を示す図である。
変形例に係る自動走行制御での作業機械と目標走行経路とを示す図である。
変形例に係る自動走行制御での作業機械と目標走行経路とを示す図である。
変形例に係る作業機械の駆動系と制御システムとの構成を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、実施形態に係る作業機械について、図面を参照しながら説明する。図1は、実施形態に係る作業機械1を示す側面図である。本実施形態に係る作業機械1は、ブルドーザである。作業機械1は、車体11と作業機12とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
17日前
株式会社小松製作所
モータ
17日前
株式会社小松製作所
作業機械
25日前
株式会社小松製作所
作業機械
18日前
株式会社小松製作所
路面整備システム
17日前
株式会社小松製作所
プラネタリギヤ機構
16日前
株式会社小松製作所
回転電機及び作業機械
1か月前
株式会社小松製作所
識別システム及び識別方法
1か月前
株式会社小松製作所
モータ及びモータの製造方法
17日前
株式会社小松製作所
ロータ、回転電機及び作業機械
1か月前
株式会社小松製作所
システム、作業車両および方法
18日前
株式会社小松製作所
システム、作業車両および方法
18日前
株式会社小松製作所
ステータ、回転電機及び作業機械
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
1か月前
トヨタ自動車株式会社
運行管理装置
1日前
トヨタ自動車株式会社
運行管理装置
1日前
株式会社小松製作所
表示システム、表示方法及び作業機械
1か月前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
トヨタ自動車株式会社
車両走行管理装置
1日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
24日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
1か月前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
1か月前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
17日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
17日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
17日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
17日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
1日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
17日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
25日前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
17日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
1か月前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
10日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
10日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
26日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ