TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118266
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013489
出願日
2024-01-31
発明の名称
作業機械の制御システム、作業機械、及び作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20250805BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の据え切り動作を抑制すること。
【解決手段】作業機械の制御システムは、コントローラを備える。コントローラは、目標走行経路を含む作業機械の走行条件を示す走行データを生成する走行データ生成部を備える。走行データ生成部は、作業機械の走行速度が閾値以下であるときに作業機械のステアリング速度が第1上限値を超過しないように走行データを生成する。
【選択図】図6
特許請求の範囲
【請求項1】
コントローラを備え、
前記コントローラは、
目標走行経路を含む作業機械の走行条件を示す走行データを生成する走行データ生成部を備え、
前記走行データ生成部は、前記作業機械の走行速度が閾値以下であるときに前記作業機械のステアリング速度が第1上限値を超過しないように前記走行データを生成する、
作業機械の制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記走行データ生成部は、前記作業機械の走行速度が閾値を超過するときに前記作業機械のステアリング速度が第1上限値よりも大きい第2上限値を超過しないように前記走行データを生成する、
請求項1に記載の作業機械の制御システム。
【請求項3】
前記走行データ生成部は、前記作業機械の走行速度がゼロであるときに前記作業機械のステアリング装置が作動しないように前記走行データを生成する、
請求項1に記載の作業機械の制御システム。
【請求項4】
前記作業機械の走行速度を検出する速度センサの検出データを取得するセンサデータ取得部と、
前記作業機械のステアリング装置を制御する動作制御部と、を備え、
前記動作制御部は、前記速度センサの検出データに基づいて前記作業機械の走行速度が閾値以下であると判定した場合、前記作業機械のステアリング速度が第1上限値を超過しないように前記ステアリング装置を制御する、
請求項1に記載の作業機械の制御システム。
【請求項5】
前記動作制御部は、前記速度センサの検出データに基づいて前記作業機械の走行速度が閾値を超過すると判定した場合、前記作業機械のステアリング速度が第1上限値よりも大きい第2閾値を超過しないように前記ステアリング装置を制御する、
請求項4に記載の作業機械の制御システム。
【請求項6】
前記動作制御部は、前記速度センサにより検出された前記作業機械の走行速度がゼロであると判定した場合、前記ステアリング装置を作動させない、
請求項4に記載の作業機械の制御システム。
【請求項7】
前記目標走行経路は、初期位置と目標位置とを繋ぐように生成され、
前記走行データ生成部は、
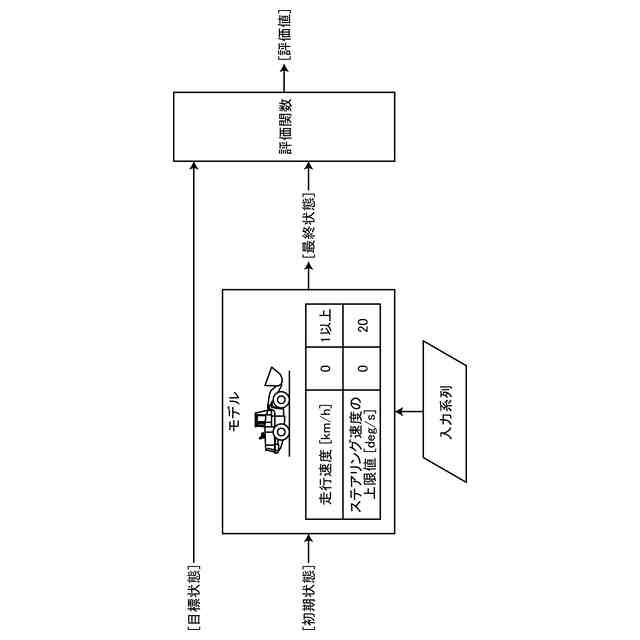
前記走行速度が閾値以下であるときにステアリング速度が第1上限値を超過せず、前記走行速度が閾値を超過するときにステアリング速度が第1上限値よりも大きい第2上限値を超過しない前記作業機械のモデルを生成し、
前記初期位置における前記モデルの内部状態を示す初期状態と前記目標位置における前記モデルの内部状態を示す目標状態とを決定し、
前記モデルの内部状態を前記初期状態から入力系列に従って変更して前記モデルの最終状態を生成し、
前記最終状態が前記目標状態になるように、前記走行データを生成する、
請求項1に記載の作業機械の制御システム。
【請求項8】
請求項1に記載の作業機械の制御システムを備える、
作業機械。
【請求項9】
コントローラが、
作業機械の走行速度が閾値以下であるときに前記作業機械のステアリング速度が第1上限値を超過しないように、目標走行経路を含む前記作業機械の走行条件を示す走行データを生成することと、
前記走行データに基づいて、前記作業機械を走行させることと、を実行する、
作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム、作業機械、及び作業機械の制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、車両が自動走行するための軌道を探索するシステムが知られている。特許文献1において、システムは、障害物の位置を表す第1制約条件に基づいて、車両の初期位置から目標位置へ移動するための経路である車両の位置及び姿勢を要素とする系列を探索し、経路からの逸脱距離に応じてペナルティ値が増加する第2制約条件を生成し、第2制約条件に基づいて、車両の初期位置から目標位置へ移動するための軌道である車両の位置、姿勢、速度及び舵角を要素とする系列を探索する。
【先行技術文献】
【特許文献】
【0003】
特開2022-157259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械が据え切り動作すると、作業機械のタイヤが摩耗する可能性がある。
【0005】
本開示は、作業機械の据え切り動作を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、コントローラを備える作業機械の制御システムが提供される。コントローラは、目標走行経路を含む作業機械の走行条件を示す走行データを生成する走行データ生成部を備え、走行データ生成部は、作業機械の走行速度が閾値以下であるときに作業機械のステアリング速度が第1上限値を超過しないように走行データを生成する。
【発明の効果】
【0007】
本開示によれば、作業機械の据え切り動作が抑制される。
【図面の簡単な説明】
【0008】
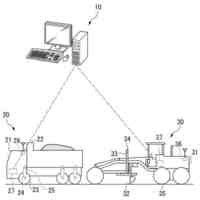
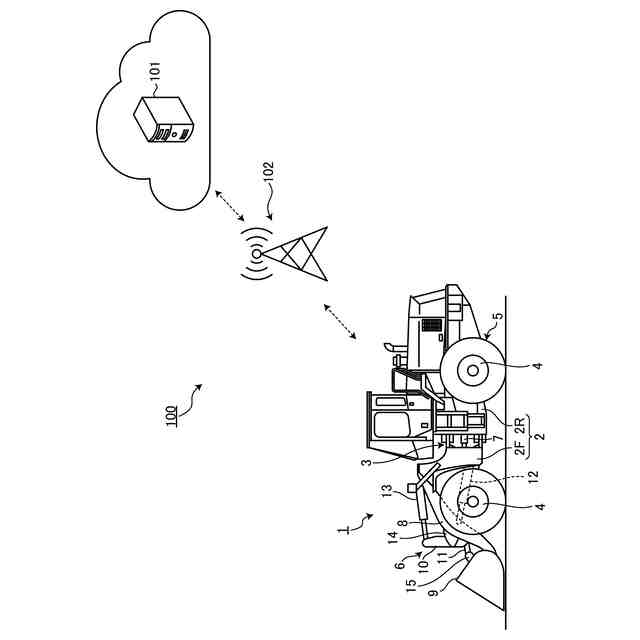
図1は、実施形態に係る作業現場の管理システムを模式的に示す図である。
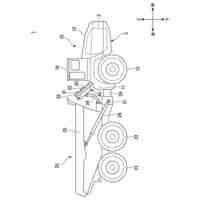
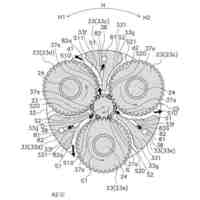
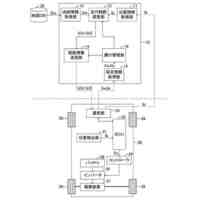
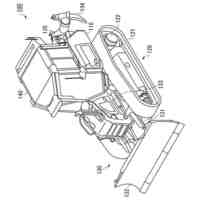
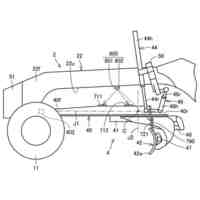
図2は、実施形態に係る作業機械を示す構成図である。
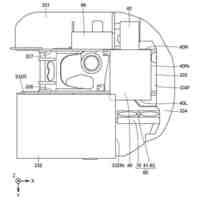
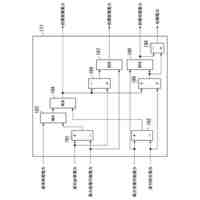
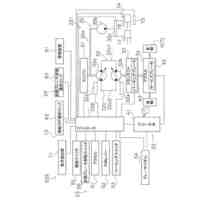
図3は、実施形態に係るコントローラのハードウエア構成図である。
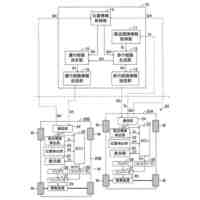
図4は、実施形態に係る作業機械の制御システムを示す機能ブロック図である。
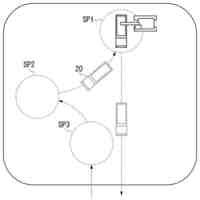
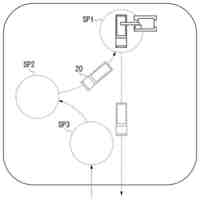
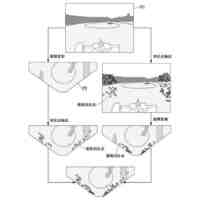
図5は、実施形態に係る作業機械のサイクル作業を説明する図である。
図6は、実施形態に係る走行データの生成方法を説明するブロック図である。
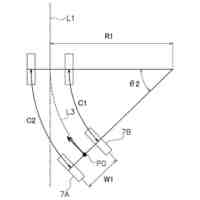
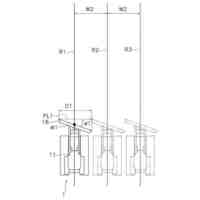
図7は、実施形態に係る走行データの生成方法を説明する模式図である。
図8は、実施形態に係る走行データの生成方法を示すフローチャートである。
図9は、実施形態に係る作業機械の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[管理システム]
図1は、実施形態に係る作業現場の管理システム100を模式的に示す図である。作業機械1は、作業現場において稼働する。作業機械1は、無人作業機械である。無人作業機械とは、運転者による運転操作によらずに無人で稼働する作業機械をいう。作業機械1は、自動制御される。実施形態において、作業機械1は、ホイールローダである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
19日前
株式会社小松製作所
モータ
19日前
株式会社小松製作所
作業車両
今日
株式会社小松製作所
作業機械
20日前
株式会社小松製作所
作業車両
今日
株式会社小松製作所
路面整備システム
19日前
株式会社小松製作所
プラネタリギヤ機構
18日前
株式会社小松製作所
モータ及びモータの製造方法
19日前
株式会社小松製作所
システム、作業車両および方法
20日前
株式会社小松製作所
システム、作業車両および方法
20日前
トヨタ自動車株式会社
運行管理装置
3日前
トヨタ自動車株式会社
運行管理装置
3日前
トヨタ自動車株式会社
車両走行管理装置
3日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
26日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
19日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
19日前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
19日前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
19日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
3日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
19日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
今日
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
19日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
12日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
12日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
今日
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
27日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動制御方法
12日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
12日前
株式会社小松製作所
作業機械および作業機械の制御方法
10日前
株式会社小松製作所
作業機械を制御するためのシステム及び作業機械を制御するための方法
18日前
個人
鋼管
11日前
FKS株式会社
擁壁
今日
株式会社奥村組
ケーソン工法
3日前
株式会社武井工業所
積みブロック
20日前
株式会社奥村組
ケーソン刃口金物
3日前
株式会社大林組
袋体付き排水パイプ
10日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ