TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131015
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028479
出願日
2024-02-28
発明の名称
システム、作業車両および方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
B60L
58/40 20190101AFI20250902BHJP(車両一般)
要約
【課題】作業車両に搭載された燃料電池が出力すべき電力を適切に決定する。
【解決手段】システムは、燃料電池と蓄電装置とを備える作業車両を制御する。システムの制御装置は、作業車両の高度に基づいて、燃料電池の発電量を制御する。
【選択図】図4
特許請求の範囲
【請求項1】
燃料電池と蓄電装置とを備える作業車両を制御するためのシステムであって、
制御装置を備え、
前記制御装置は、
前記作業車両の高度に基づいて、前記燃料電池の発電量を制御する、
システム。
続きを表示(約 770 文字)
【請求項2】
前記制御装置は、
前記蓄電装置の充電率と前記作業車両の稼働に必要な必要電力とに基づいて、前記燃料電池の前記発電量を制御する、
請求項1に記載のシステム。
【請求項3】
前記制御装置は、
前記高度に基づいて目標充電率を決定し、
前記目標充電率と前記蓄電装置の充電率と前記必要電力とに基づいて、前記燃料電池の前記発電量を制御する、
請求項2に記載のシステム。
【請求項4】
前記制御装置は、
前記高度が高いほど前記目標充電率を低い値に決定する、
請求項3に記載のシステム。
【請求項5】
前記制御装置は、
前記目標充電率と前記充電率との比例制御に基づいて前記燃料電池の基準発電電力を設定し、
前記基準発電電力と前記必要電力とに基づいて、前記燃料電池の前記発電量を制御する、
請求項3に記載のシステム。
【請求項6】
前記制御装置は、前記作業車両の標高の計測値に基づいて前記高度を特定する
請求項1に記載のシステム。
【請求項7】
前記制御装置は、前記作業車両の位置と、前記作業車両が稼働する作業現場の位置と高度とを関連付けた地図データとに基づいて前記高度を特定する
請求項1に記載のシステム。
【請求項8】
燃料電池と、
蓄電装置と、
請求項1から請求項7の何れか1項に記載のシステムと
を備える作業車両。
【請求項9】
燃料電池と蓄電装置とを備える作業車両を制御するための方法であって、
前記作業車両の高度に基づいて、前記燃料電池の発電量を制御するステップと、
を備える方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、システム、作業車両および方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
水素ガスを燃料として用いる燃料電池を搭載する作業車両が検討されている。燃料電池で駆動する作業車両は通常、燃料電池の搭載量を抑え、また降坂における回生電力を吸収させるために、バッテリを備える。そのため、作業車両の制御装置は、燃料電池とバッテリのエネルギーを適切に分配するエネルギーマネジメントを行う必要がある。
【0003】
特許文献1には、走行ルートの地形に基づいて燃料電池の出力を制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-073113号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業車両の走行に要する電力は、走行路によって異なる。走行路が上り坂であれば力行のための必要電力は大きくなり、走行路が下り坂であれば回生電力が発生する。このため、作業車両が高低差のある作業現場で稼働する場合に、作業車両が比較的高度の高い地点において燃料電池の出力によって蓄電装置が充電されると、高度の低い地点へ向かって作業車両が下り坂を走行するときに、回生電力を熱に変換して消費せざるを得ず、エネルギー効率が悪くなる可能性がある。
本開示の目的は、高低差のある作業現場で稼働する燃料電池を搭載した作業車両のエネルギー効率を向上することができるシステム、作業車両および方法を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、システムは、燃料電池と蓄電装置とを備える作業車両を制御するためのシステムであって、制御装置を備える。前記制御装置は、前記作業車両の高度に基づいて、前記燃料電池の発電量を制御する。
【発明の効果】
【0007】
上記態様によれば、システムは、高低差のある作業現場で稼働する燃料電池を搭載した作業車両のエネルギー効率を向上することができる。
【図面の簡単な説明】
【0008】
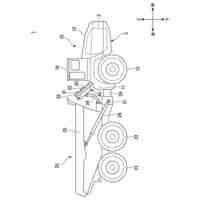
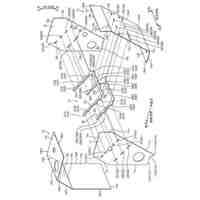
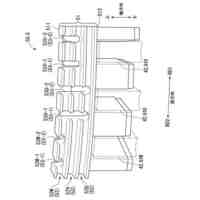
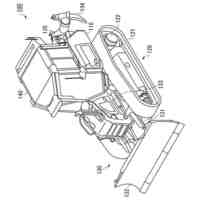
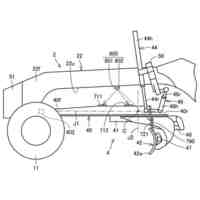
第一実施形態に係る運搬車両を模式的に示す斜視図である。
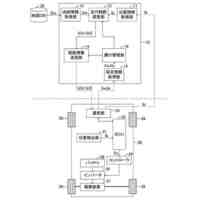
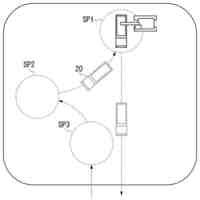
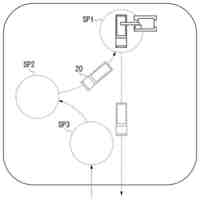
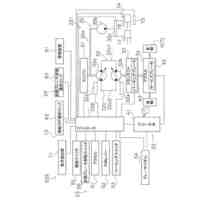
第一実施形態に係る運搬車両の構成を示す概略ブロック図である。
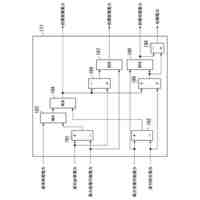
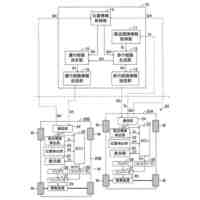
第一実施形態に係る運搬車両が備える制御系の構成を示す概略ブロック図である。
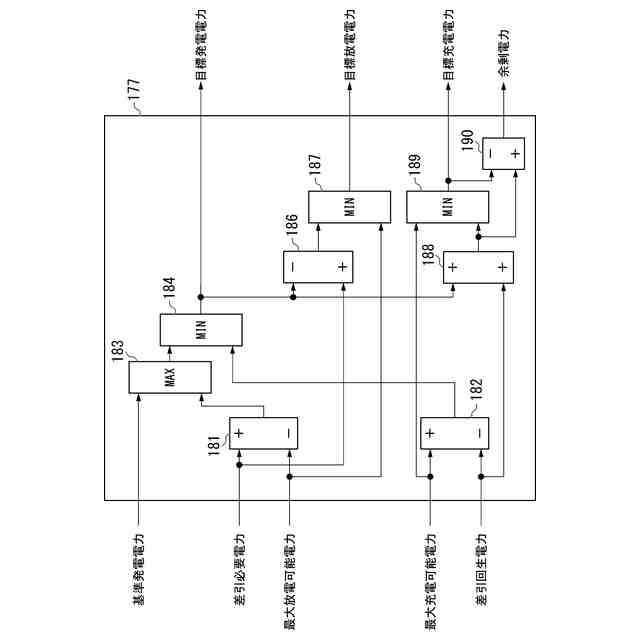
第一実施形態に係る制御量決定部による演算アルゴリズムを示すブロック図である。
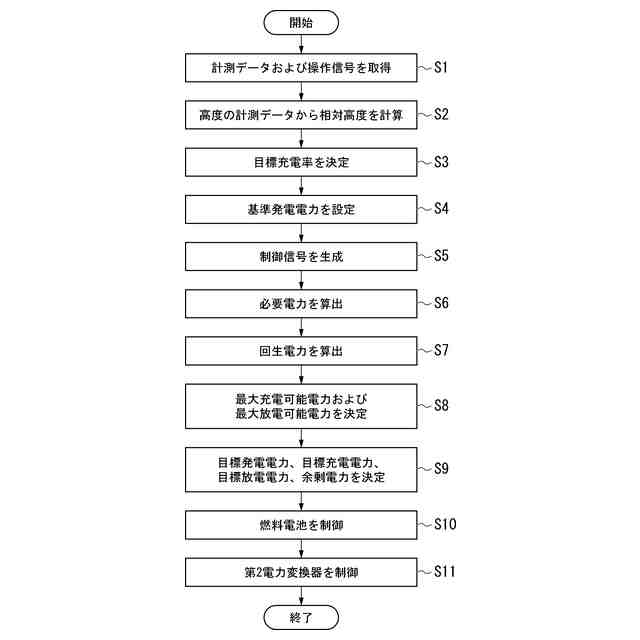
第一実施形態に係る運搬車両の制御方法を示すフローチャートである。
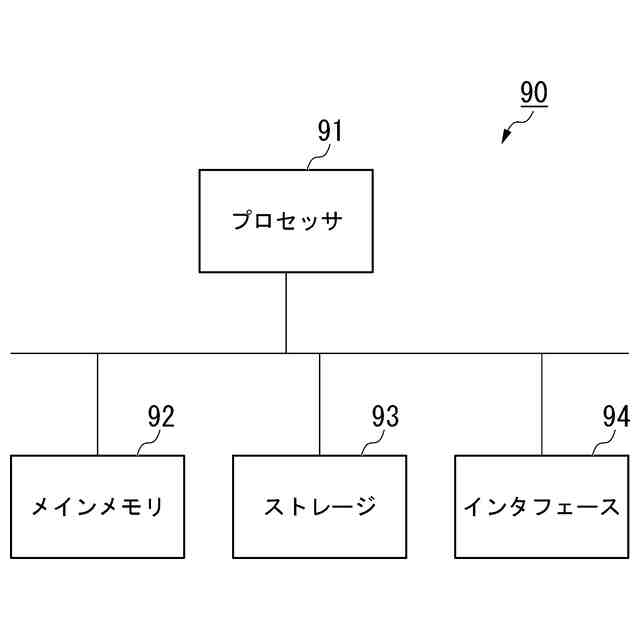
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
【0009】
〈第一実施形態〉
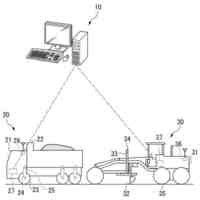
《運搬システム1の構成》
以下、図面を参照しながら実施形態について詳しく説明する。
図1は、第一実施形態に係る運搬車両10を模式的に示す斜視図である。運搬車両10は、ダンプボディ11と、車体12と、走行装置13とを備える。運搬車両10は、例えばダンプトラックであり、作業車両の一例である。
【0010】
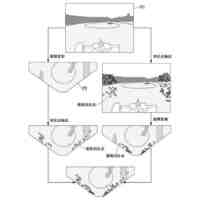
ダンプボディ11は、積荷が積載される部材である。ダンプボディ11は、作業機の一例である。ダンプボディ11の少なくとも一部は、車体12よりも上方に配置される。ダンプボディ11は、ダンプ動作及び下げ動作する。ダンプ動作及び下げ動作により、ダンプボディ11は、ダンプ姿勢及び積載姿勢に調整される。ダンプ姿勢とは、ダンプボディ11が上昇している姿勢をいう。積載姿勢とは、ダンプボディ11が下降している姿勢をいう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
26日前
株式会社小松製作所
モータ
26日前
株式会社小松製作所
作業車両
7日前
株式会社小松製作所
作業機械
27日前
株式会社小松製作所
作業車両
7日前
株式会社小松製作所
路面整備システム
26日前
株式会社小松製作所
プラネタリギヤ機構
25日前
株式会社小松製作所
モータ及びモータの製造方法
26日前
株式会社小松製作所
システム、作業車両および方法
27日前
株式会社小松製作所
システム、作業車両および方法
27日前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
4日前
トヨタ自動車株式会社
運行管理装置
10日前
トヨタ自動車株式会社
運行管理装置
10日前
トヨタ自動車株式会社
車両走行管理装置
10日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
1か月前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
26日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
26日前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
26日前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
26日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
10日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
26日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
7日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
1か月前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
5日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
19日前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
26日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
19日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
7日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動制御方法
19日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
19日前
株式会社小松製作所
作業機械および作業機械の制御方法
17日前
株式会社小松製作所
作業機械を制御するためのシステム及び作業機械を制御するための方法
25日前
個人
カーテント
4か月前
個人
タイヤレバー
2か月前
個人
車窓用防虫網戸
4か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ