TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132807
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030614
出願日
2024-02-29
発明の名称
作業内容推定システムおよび作業内容推定方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
G06Q
50/08 20120101AFI20250903BHJP(計算;計数)
要約
【課題】非効率作業を検出する。
【解決手段】取得部は、作業機械の車体情報を取得する。推定部は、車体情報に基づいて作業機械の作業内容を推定する。特定部は、車体情報に基づいて、作業機械の作業内容における非効率作業を特定する。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械の車体情報に基づいて前記作業機械の作業内容を推定する作業機械の作業内容推定システムであって、
前記作業機械の車体情報を取得する取得部と、
前記車体情報に基づいて前記作業機械の作業内容を推定する推定部と、
前記車体情報に基づいて、前記作業機械の前記作業内容における非効率作業を特定する特定部と、
を備える作業機械の作業内容推定システム。
続きを表示(約 540 文字)
【請求項2】
前記特定部は、前記車体情報の所定の組み合わせに基づいて、前記非効率作業を特定する、
請求項1に記載の作業機械の作業内容推定システム。
【請求項3】
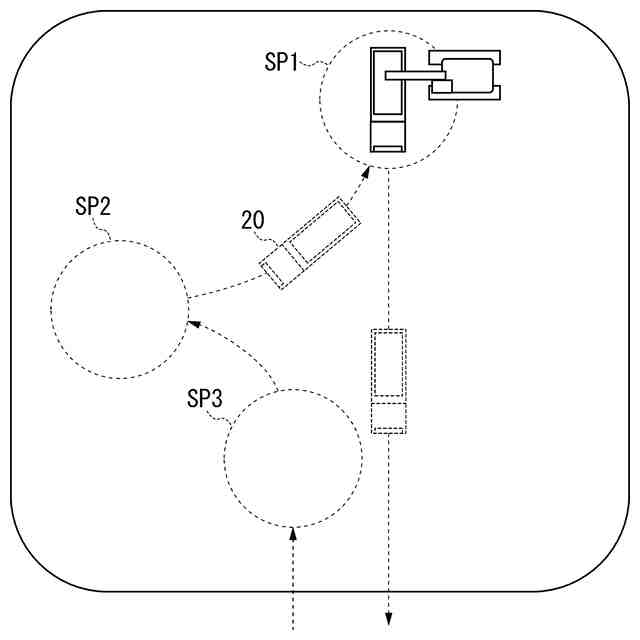
前記作業内容は、積込場内において積込スポットへ向かう一連の走行、又は排土場内において排土スポットへ向かう一連の走行であるスポッティング作業を含み、
前記特定部は、前記車体情報に基づいて、前記スポッティング作業中に前記作業機械が進行方向を切り替えた後に所定距離以上走行した部分を、非効率作業として特定する、
請求項2に記載の作業機械の作業内容推定システム。
【請求項4】
前記作業機械は、ダンプトラックである、
請求項1に記載の作業内容推定システム。
【請求項5】
作業機械の車体情報に基づいて前記作業機械の作業内容を推定する作業内容推定方法であって、
前記作業機械の車体情報を取得するステップと、
前記車体情報に基づいて前記作業機械の作業内容を推定するステップと、
前記車体情報に基づいて、前記作業機械の前記作業内容における非効率作業を特定するステップと、
を備える作業機械の作業内容推定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業内容推定システムおよび作業内容推定方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、作業現場で作業する作業機械の作業状態を推定する技術が開示されている。特許文献1には、ダンプトラックの作業内容が、積込作業、排土作業、積載走行、空荷走行、停車のいずれであるかを推定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/017159号
【発明の概要】
【発明が解決しようとする課題】
【0004】
オペレータが作業機械を操作する際に、ミスをリカバーする動作など作業効率の低い作業が発生することがある。作業現場の管理において、このような非効率作業を検出することが求められている。
本開示の目的は、非効率作業を検出することができる作業機械の表示制御システムおよび作業内容の表示方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、作業機械の作業内容推定システムは、作業機械の車体情報に基づいて前記作業機械の作業内容を推定する作業機械の作業内容推定システムであって、前記作業機械の車体情報を取得する取得部と、前記車体情報に基づいて前記作業機械の作業内容を推定する推定部と、前記車体情報に基づいて、前記作業機械の前記作業内容における非効率作業を特定する特定部と、を備える。
【発明の効果】
【0006】
上記態様によれば、作業機械の表示制御システムは、非効率作業を検出することができる。
【図面の簡単な説明】
【0007】
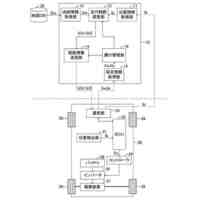
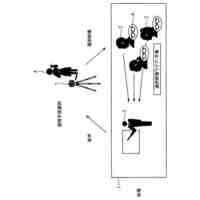
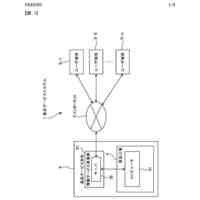
第一実施形態に係る作業内容推定システムの例を示す図である。
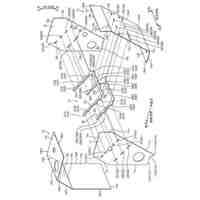
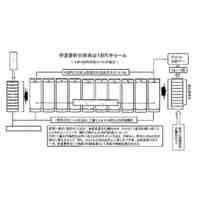
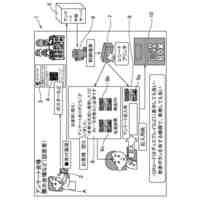
第一実施形態に係る作業エリアの例を示す図である。
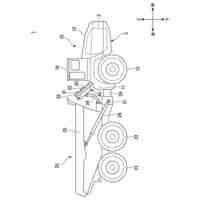
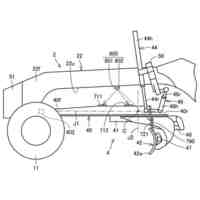
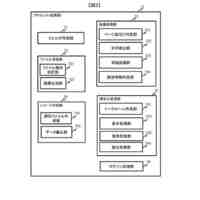
第一実施形態に係る作業機械の構成を示す概略図である。
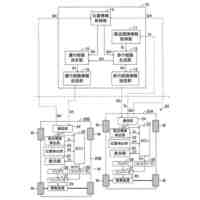
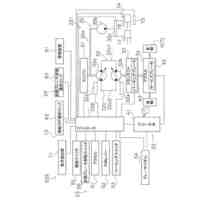
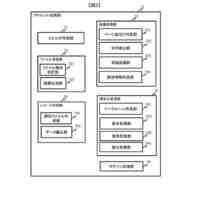
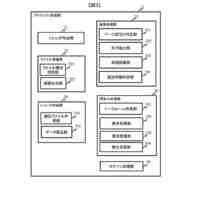
第一実施形態に係る管理装置の構成を示す概略ブロック図である。
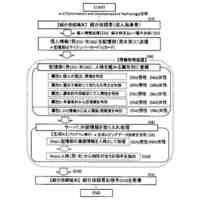
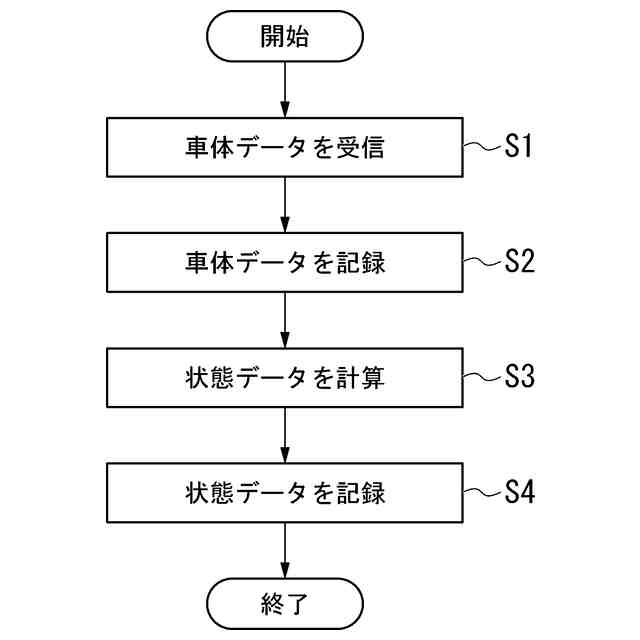
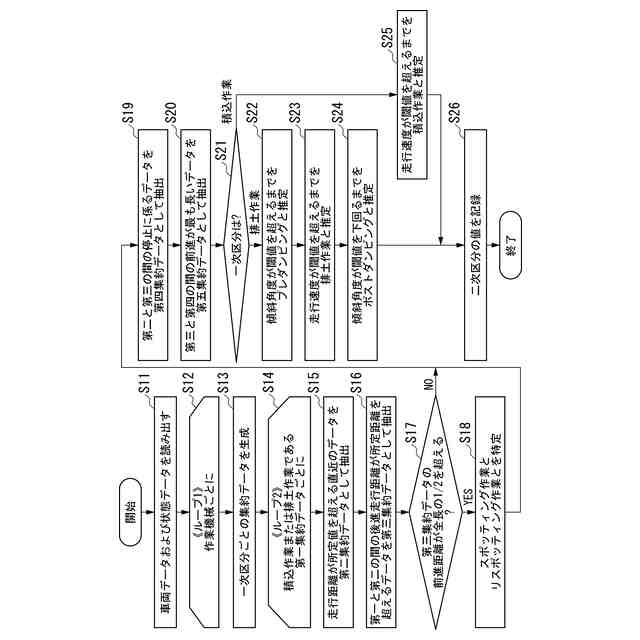
第一実施形態に係る管理装置によるデータ収集処理を示すフローチャートである。
第一実施形態に係る管理装置による解析処理を示すフローチャートである。
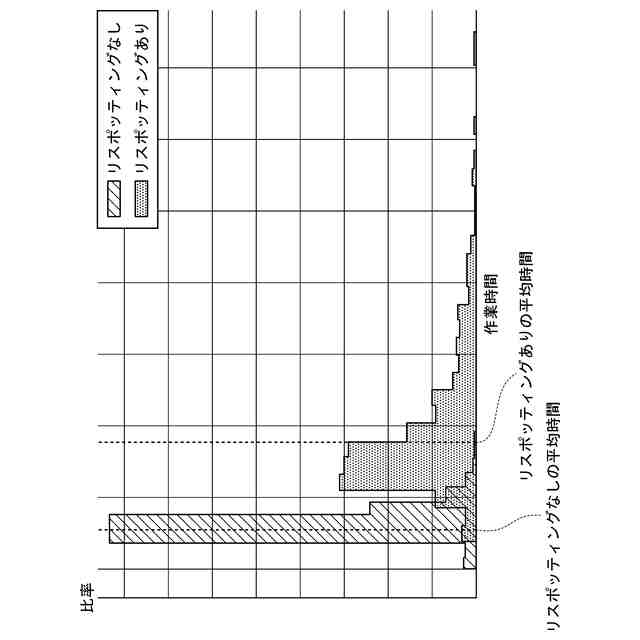
第一実施形態に係るリスポッティングによるロス時間を表すヒストグラムの例である。
【発明を実施するための形態】
【0008】
〈第一実施形態〉
《作業内容推定システム1》
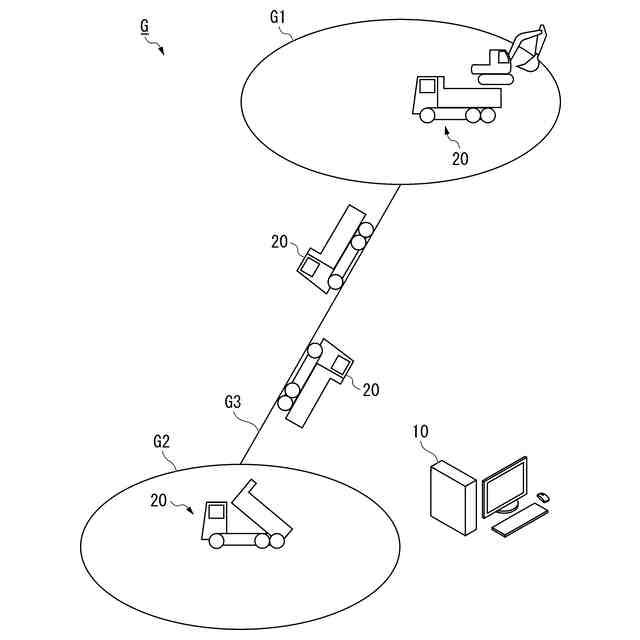
図1は、第一実施形態に係る作業内容推定システムの例を示す図である。
第一実施形態に係る作業内容推定システム1は、作業機械20であるダンプトラックの作業内容を分析して現場監督に表示する。現場監督は、作業内容を確認することで、作業機械20のオペレータの技量を評価することができる。作業内容推定システム1は、管理装置10と、複数の作業機械20とを備える。作業内容推定システム1は、作業機械20の表示制御システムの一例である。
【0009】
管理装置10は、複数の作業機械20の車体データに基づいて作業機械20の作業内容を分析してディスプレイに表示する。
作業機械20は、作業現場Gにおいて発生する荷を運搬する。作業機械20が運搬する荷の例としては、砕石、土砂、岩石、石炭などが挙げられる。
【0010】
第一実施形態に係る作業現場Gは積込場G1と排土場G2とを有する。以下、積込場G1および排土場G2を作業エリアともよぶ。積込場G1と排土場G2とはそれぞれ走行路G3によって接続される。走行路G3は、積込場G1と排土場G2とを接続する一般道路、および作業エリア内に土砂の搬送用に用意された搬送路を含む。作業機械20であるダンプトラックは、土砂を運搬するために積込場G1と排土場G2との間を走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
4日前
株式会社小松製作所
作業車両
4日前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
1日前
トヨタ自動車株式会社
運行管理装置
7日前
トヨタ自動車株式会社
運行管理装置
7日前
トヨタ自動車株式会社
車両走行管理装置
7日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
7日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
4日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
2日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
16日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
4日前
株式会社小松製作所
作業機械および作業機械の制御方法
14日前
個人
フラワーコートA
1か月前
個人
工程設計支援装置
1か月前
個人
地球保全システム
2日前
個人
介護情報提供システム
2か月前
個人
冷凍食品輸出支援構造
29日前
個人
為替ポイント伊達夢貯
29日前
個人
表変換編集支援システム
22日前
個人
携帯情報端末装置
1か月前
個人
結婚相手紹介支援システム
1か月前
個人
知財出願支援AIシステム
29日前
個人
AIによる情報の売買の仲介
1か月前
個人
行動時間管理システム
24日前
個人
パスワード管理支援システム
22日前
個人
海外支援型農作物活用システム
14日前
個人
システム及びプログラム
15日前
個人
AIキャラクター制御システム
22日前
個人
食品レシピ生成システム
1日前
個人
アンケート支援システム
1か月前
株式会社キーエンス
受発注システム
1日前
株式会社キーエンス
受発注システム
1日前
株式会社キーエンス
受発注システム
1日前
株式会社アジラ
進入判定装置
1か月前
日本精機株式会社
施工管理システム
1か月前
個人
パスポートレス入出国システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ