TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116659
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011200
出願日
2024-01-29
発明の名称
ロータ、回転電機及び作業機械
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
H02K
1/28 20060101AFI20250801BHJP(電力の発電,変換,配電)
要約
【課題】製造コストを低減することができるロータ、回転電機及び作業機械を提供すること。
【解決手段】ロータは、複数の鋼板をロータシャフトの軸方向に積層して構成されるとともに前記軸方向の外側の少なくとも一方に突出する凸部を有する円筒状のロータコアと、前記ロータコアの前記軸方向の外側に配置されるとともに前記凸部と対応する部位に凹部又は貫通孔が形成された支持板と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
複数の鋼板をロータシャフトの軸方向に積層して構成されるとともに前記軸方向の外側の少なくとも一方に突出する凸部を有する円筒状のロータコアと、
前記ロータコアの前記軸方向の外側に配置されるとともに前記凸部と対応する部位に凹部又は貫通孔が形成された支持板と、を備える、
ロータ。
続きを表示(約 870 文字)
【請求項2】
前記凹部又は前記貫通孔は、前記凸部の全体を囲うように形成される、
請求項1に記載のロータ。
【請求項3】
前記凹部又は前記貫通孔の最内周は、前記凸部の最外周よりも外側に配置される、
請求項1又は2に記載のロータ。
【請求項4】
前記軸方向と直交する面内方向における前記凹部又は前記貫通孔の最小幅は、前記凸部の最大幅の1.1倍以上である、
請求項3に記載のロータ。
【請求項5】
前記支持板には、前記凹部が形成され、
前記凹部の底面は、前記支持板の厚み中心位置よりも前記軸方向の内側に配置される、
請求項1又は2に記載のロータ。
【請求項6】
前記軸方向における前記凹部の最小深さは、前記凸部の最大高さの1.2倍以上である、
請求項5に記載のロータ。
【請求項7】
前記複数の鋼板の各々は、前記凸部と対応する部位に、前記軸方向の外側に向かって山なりに突出する山なり部を有する、
請求項1又は2に記載のロータ。
【請求項8】
前記支持板は、前記ロータコアを前記軸方向の両外側から挟むよう一対設けられ、
前記凹部又は前記貫通孔は、一対の前記支持板のうち前記凸部に向かい合う一方に形成され、他方には形成されない、
請求項1又は2に記載のロータ。
【請求項9】
前記複数の鋼板は、カシメ用の前記凸部が付されたカシメ用凸部付き鋼板の1種類で構成され、
前記ロータコアは、複数の前記カシメ用凸部付き鋼板を前記軸方向に積層して構成される
請求項1又は2に記載のロータ。
【請求項10】
前記凸部は、前記ロータコアの周方向に間隔をあけて複数設けられ、
前記凹部又は前記貫通孔は、複数の前記凸部の各々と対応するよう複数形成される、
請求項1又は2に記載のロータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロータ、回転電機及び作業機械に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、回転電機のロータとして、ロータシャフト、ロータコア及び支持板を備えた構成が知られている。(特許文献1参照)。例えば、ロータコアは、複数の鋼板をロータシャフトの軸方向に積層して構成される。複数の鋼板は、カシメによる接合方法で接合される場合がある。
【先行技術文献】
【特許文献】
【0003】
再公表WO2017/168971号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
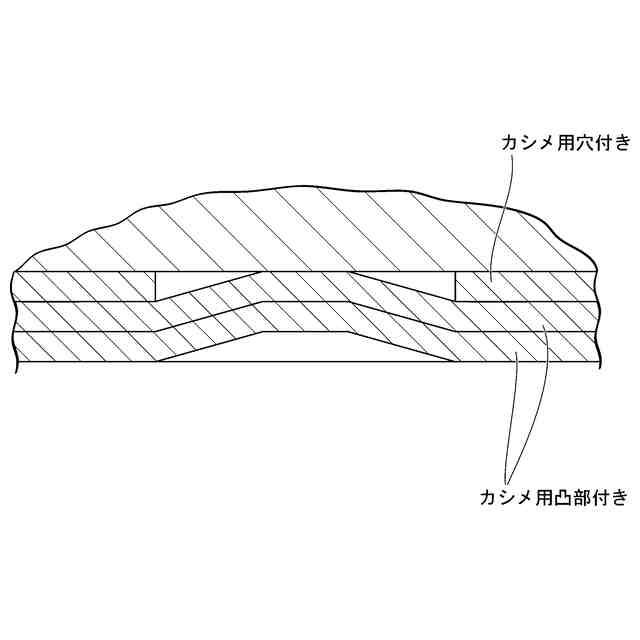
しかしながら、複数の鋼板がカシメによる接合方法で接合される場合、鋼板の種類がカシメ用穴付き及びカシメ用凸部付きの2種類となる。鋼板の種類が2種類となると、それぞれの鋼板を別々に製造するため、製造工程の増加と管理工数の増加により、製造コストの増加を招くおそれがある。
【0005】
本開示の態様は、製造コストを低減することができるロータ、回転電機及び作業機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るロータは、複数の鋼板をロータシャフトの軸方向に積層して構成されるとともに前記軸方向の外側の少なくとも一方に突出する凸部を有する円筒状のロータコアと、前記ロータコアの前記軸方向の外側に配置されるとともに前記凸部と対応する部位に凹部又は貫通孔が形成された支持板と、を備える。
【発明の効果】
【0007】
本開示の態様によれば、製造コストを低減することができるロータ、回転電機及び作業機械を提供することができる。
【図面の簡単な説明】
【0008】
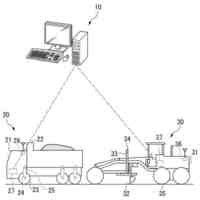
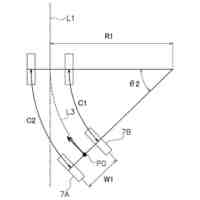
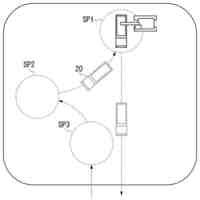
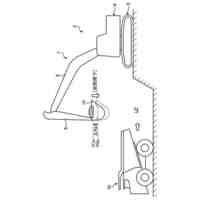
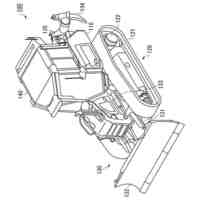
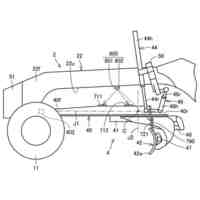
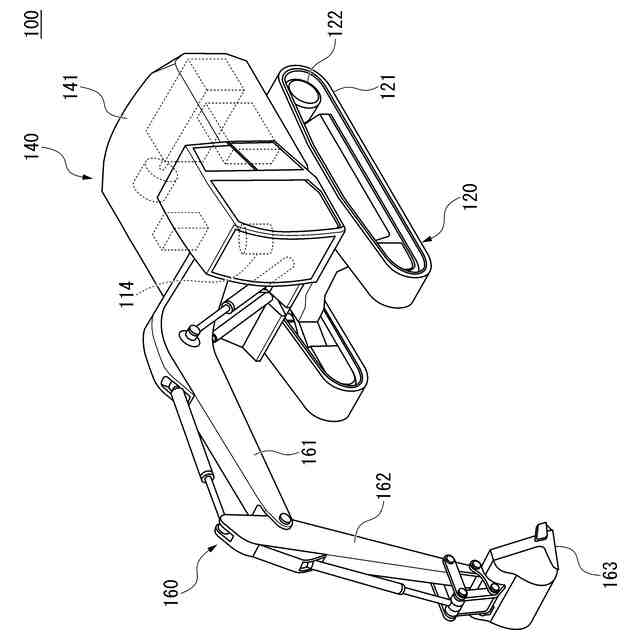
実施形態に係る作業機械を示す概略図である。
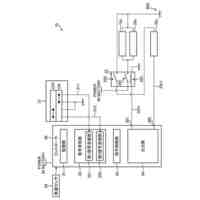
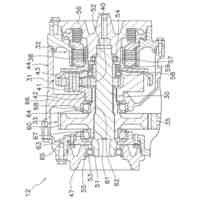
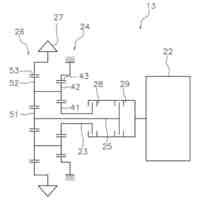
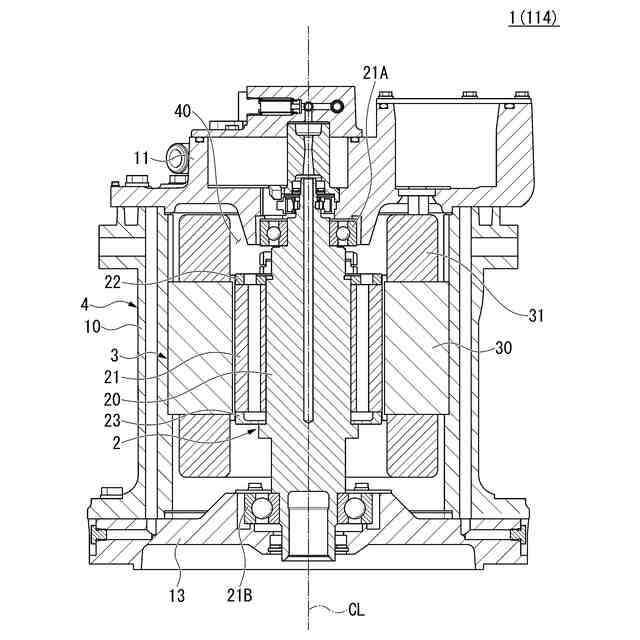
実施形態に係る回転電機の断面図である。
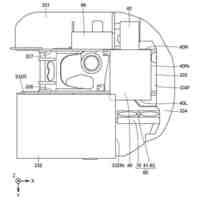
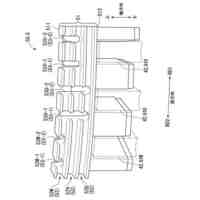
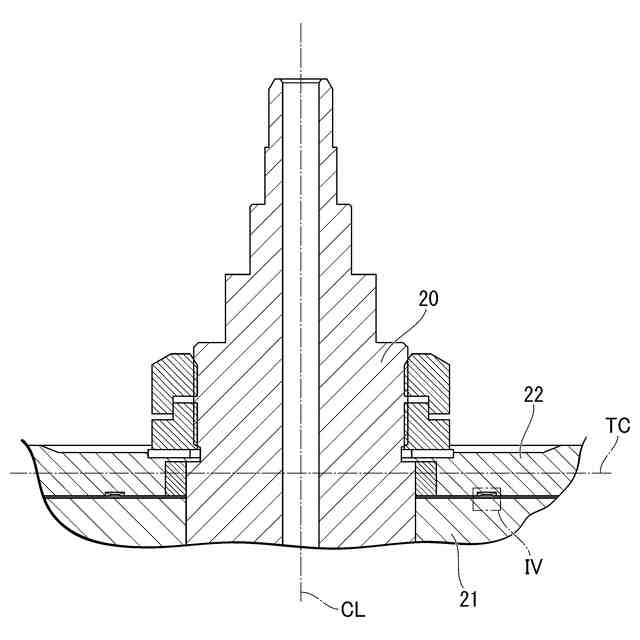
実施形態に係るロータの上部を示す断面図である。
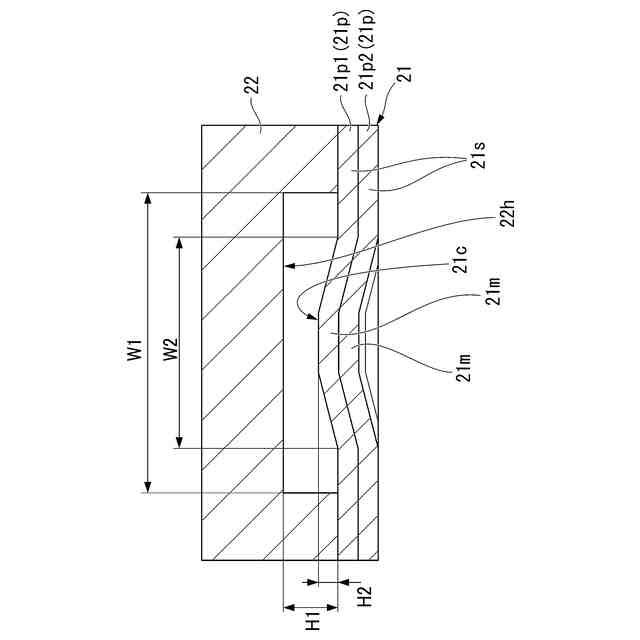
図3のIV部分の拡大図である。
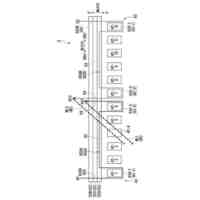
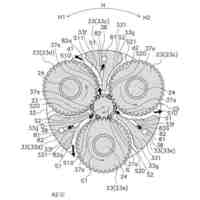
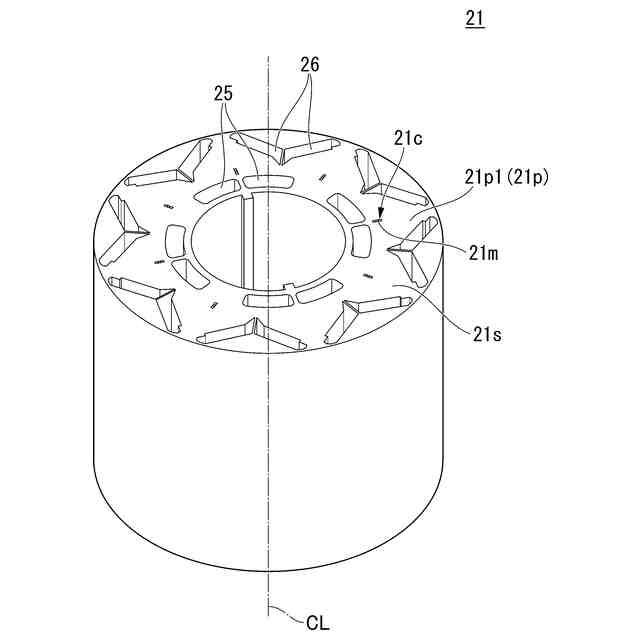
実施形態に係るロータコアの斜視図である。
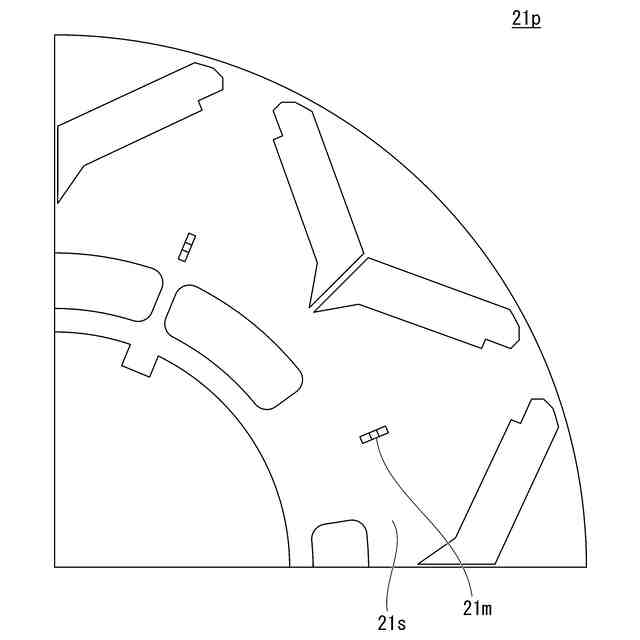
実施形態に係るロータコアの鋼板の一部の平面図である。
比較例に係るロータの一部拡大図である。
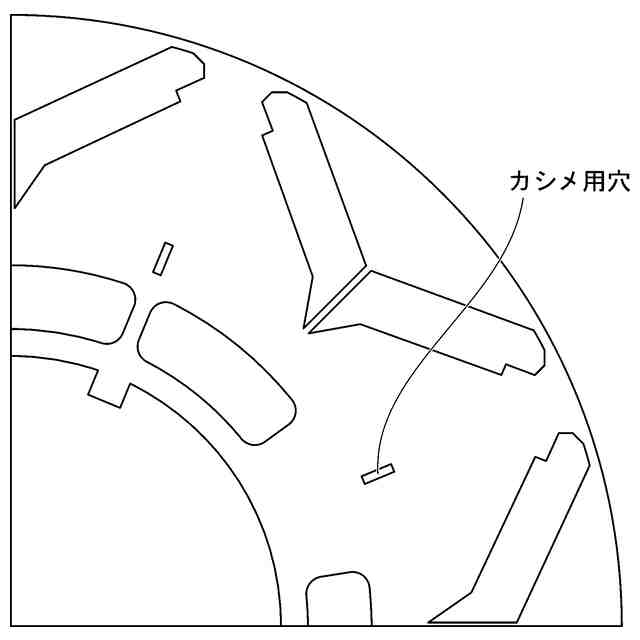
比較例に係るロータコアの鋼板の一部の平面図である。
第1変形例に係る凹部を軸方向から見た図である。
第1変形例に係る凸部の断面図である。
第2変形例に係る凹部を軸方向から見た図である。
第2変形例に係る凸部の断面図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態について図面を参照して説明する。本実施形態においては、回転電機として、電動旋回ショベル(作業機械の一例)に搭載されるものであり、電動旋回ショベルの上部旋回体を旋回させるための旋回モータとして構成される例を挙げて説明する。
【0010】
以下の説明において、例えば「平行」や「直交」、「中心」、「同軸」等の相対的又は絶対的な配置を示す表現は、厳密にそのような配置や状態を意味するのみならず、公差や同じ機能が得られる程度の角度や距離をもって相対的に変位している配置や状態をも含むものとする。以下の説明に用いる図面では、各部材を認識可能な大きさとするため、各部材の縮尺を適宜変更して示す場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
18日前
株式会社小松製作所
モータ
18日前
株式会社小松製作所
作業機械
26日前
株式会社小松製作所
作業機械
19日前
株式会社小松製作所
路面整備システム
18日前
株式会社小松製作所
プラネタリギヤ機構
17日前
株式会社小松製作所
識別システム及び識別方法
1か月前
株式会社小松製作所
モータ及びモータの製造方法
18日前
株式会社小松製作所
システム、作業車両および方法
19日前
株式会社小松製作所
システム、作業車両および方法
19日前
株式会社小松製作所
作業機械、及び、トランスファ装置
1か月前
トヨタ自動車株式会社
運行管理装置
2日前
トヨタ自動車株式会社
運行管理装置
2日前
株式会社小松製作所
表示システム、表示方法及び作業機械
1か月前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
トヨタ自動車株式会社
車両走行管理装置
2日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
25日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
1か月前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
18日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
18日前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
18日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
18日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
2日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
18日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
26日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
11日前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
18日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
11日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
26日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
27日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
27日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動制御方法
11日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
11日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ