TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117872
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012836
出願日
2024-01-31
発明の名称
建設機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/22 20060101AFI20250805BHJP(水工;基礎;土砂の移送)
要約
【課題】建設機械の動作制御に対して容易に適用可能である制御を実行する建設機械を提供する。
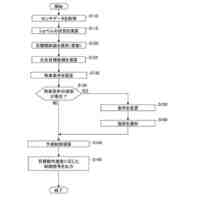
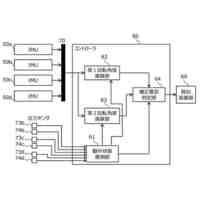
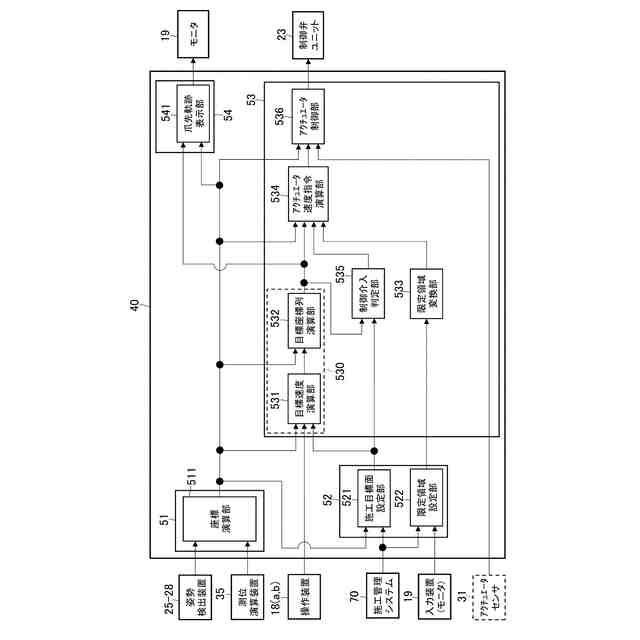
【解決手段】建設機械のコントローラは、姿勢検出装置の検出情報に基づき機体及び作業具の座標を演算する座標演算を行い、施工目標面と座標演算の演算結果である作業具の座標を基に所定条件を満たす所定の時間区間における作業具の状態量の目標値である作業具の目標状態量の時系列を演算する目標状態量演算を行い、複数の油圧アクチュエータの速度を制御入力とし作業具の状態量を予測する予測モデルを用いて所定の時間区間の作業具の状態量と目標状態量演算の演算結果である作業具の目標状態量の時系列との偏差に基づき複数の油圧アクチュエータの速度指令値を演算する指令演算を行い、状態量検出装置の検出情報に基づく複数の油圧アクチュエータの実速度を複数の油圧アクチュエータの速度指令値に一致させるように複数の油圧アクチュエータの駆動を制御する。
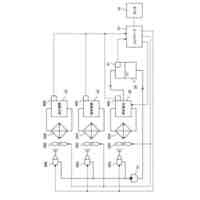
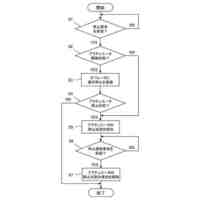
【選択図】 図3
特許請求の範囲
【請求項1】
作業具を含む複数の被駆動部材により構成された多関節型の作業装置と、
前記作業装置が回動可能に取り付けられた機体と、
前記機体及び前記作業装置を駆動する複数の油圧アクチュエータと、
前記機体及び前記作業装置の姿勢に関する情報を検出する姿勢検出装置と、
前記複数の油圧アクチュエータの状態量に関する情報を検出する状態量検出装置と、
前記機体及び前記作業装置の動作を制御するコントローラとを備えた建設機械において、
前記コントローラは、
前記姿勢検出装置からの検出情報に基づいて前記機体及び前記作業具の座標を演算する座標演算を行い、
前記作業装置の作業対象として設定されている施工目標面と前記座標演算の演算結果である前記作業具の座標とを基に、所定条件を満たすように演算時点から所定の時間までの所定の時間区間における前記作業具の状態量の目標値である前記作業具の目標状態量の時系列を演算する目標状態量演算を行い、
前記複数の油圧アクチュエータの速度を制御入力として前記作業具の状態量を予測可能な予測モデルを用いることで得られる前記所定の時間区間における前記作業具の状態量と前記目標状態量演算の演算結果である前記作業具の目標状態量の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算する指令演算を行い、
前記状態量検出装置からの検出情報に基づいて得られる前記複数の油圧アクチュエータの実速度を前記指令演算の演算結果である前記複数の油圧アクチュエータの速度指令値に一致させるように前記複数の油圧アクチュエータの駆動を制御する
ことを特徴とする建設機械。
続きを表示(約 3,500 文字)
【請求項2】
請求項1に記載の建設機械において、
前記複数の油圧アクチュエータの駆動を指示する操作装置をさらに備え、
前記コントローラの前記目標状態量演算は、
前記施工目標面と前記座標演算の演算結果である前記作業具の座標と前記操作装置の操作とを基に、前記所定条件を満たすような前記作業具の目標速度を演算する目標速度演算を行い、
前記所定の時間区間における前記作業具の目標状態量の時系列として、前記座標演算の演算結果である前記作業具の座標と前記目標速度演算の演算結果である前記作業具の目標速度とを用いて、前記所定の時間区間における前記作業具の座標の目標値である前記作業具の目標座標の時系列を演算する目標座標列演算を行うものであり、
前記コントローラの前記指令演算における前記予測モデルは、前記作業具の状態量として座標を予測可能に構成されたものであり、
前記コントローラの前記指令演算は、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の座標と前記目標座標列演算の演算結果である前記作業具の目標座標の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項3】
請求項1に記載の建設機械において、
前記コントローラの前記目標状態量演算は、前記所定の時間区間における前記作業具の目標状態量の時系列として、前記施工目標面と前記座標演算の演算結果である前記作業具の座標とに基づき、前記所定条件を満たすように前記所定の時間区間における前記作業具の座標の目標値である前記作業具の目標座標の時系列を自動生成する目標座標列生成を行うものであり、
前記コントローラの前記指令演算における前記予測モデルは、前記作業具の状態量として座標を予測可能に構成されたものであり、
前記コントローラの前記指令演算は、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の座標と前記目標座標列生成の結果である前記作業具の目標座標の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項4】
請求項1に記載の建設機械において、
前記建設機械は、前記建設機械の外部に配置された遠隔操作装置よって前記複数の油圧アクチュエータの駆動を指示する遠隔操作が可能に構成され、
前記コントローラの前記目標状態量演算は、
前記施工目標面と前記座標演算の演算結果である前記作業具の座標と前記遠隔操作装置の操作とを基に、前記所定条件を満たすような前記作業具の目標速度を演算する目標速度演算を行い、
前記所定の時間区間における前記作業具の目標状態量の時系列として、前記座標演算の演算結果である前記作業具の座標と前記目標速度演算の演算結果である前記作業具の目標速度とを用いて、前記所定の時間区間における前記作業具の座標の目標値である前記作業具の目標座標の時系列を演算する目標座標列演算を行うと共に、
前記所定の時間区間における前記作業具の目標状態量の時系列として、前記施工目標面と前記座標演算の演算結果である前記作業具の座標とに基づき、前記所定条件を満たすように前記所定の時間区間における前記作業具の座標の目標値である前記作業具の目標座標の時系列を自動生成する目標座標列生成を行うものであり、
前記コントローラの前記指令演算における前記予測モデルは、前記作業具の状態量として座標を予測可能に構成されたものであり、
前記コントローラの前記指令演算は、
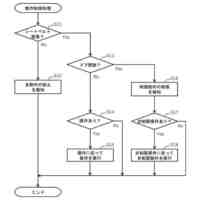
前記目標座標列演算が実行されている場合には、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の座標と前記目標座標列演算の演算結果である前記作業具の目標座標の時系列との偏差に基づき、前記複数の油圧アクチュエータの速度指令値を演算する一方、
前記目標座標列演算が実行不能な場合には、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の座標と前記目標座標列生成の結果である前記作業具の目標座標の時系列との偏差に基づき、前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項5】
請求項1に記載の建設機械において、
前記複数の油圧アクチュエータの駆動を指示する操作装置をさらに備え、
前記コントローラの前記目標状態量演算は、
前記施工目標面と前記座標演算の演算結果である前記作業具の座標と前記操作装置の操作とを基に、前記所定条件を満たすような前記作業具の目標速度を演算する目標速度演算を行い、
前記所定の時間区間における前記作業具の目標状態量の時系列として、前記目標速度演算の演算結果である前記作業具の目標速度を用いて、前記所定の時間区間における前記作業具の速度の目標値である前記作業具の目標速度の時系列を演算する目標速度列演算を行うものであり、
前記コントローラの前記指令演算における前記予測モデルは、前記作業具の状態量として速度を予測可能に構成されたものであり、
前記コントローラの前記指令演算は、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の速度と前記目標速度列演算の演算結果である前記作業具の目標速度の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項6】
請求項2に記載の建設機械において、
前記コントローラの前記目標状態量演算は、前記目標速度演算および前記目標座標列演算に加えて、前記所定の時間区間における前記作業具の目標状態量の時系列として、前記目標速度演算の演算結果である前記作業具の目標速度を用いて前記所定の時間区間における前記作業具の速度の目標値である前記作業具の目標速度の時系列を演算する目標速度列演算も行うものであり、
前記コントローラの前記指令演算における前記予測モデルは、前記作業具の状態量として座標に加えて速度も予測可能に構成されたものであり、
前記コントローラの前記指令演算は、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の座標と前記目標座標列演算の演算結果である前記作業具の目標座標の時系列との偏差、及び、前記予測モデルを用いることで得られる前記所定の時間区間における前記作業具の速度と前記目標速度列演算の演算結果である前記作業具の目標速度の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項7】
請求項1に記載の建設機械において、
前記コントローラは、さらに、前記建設機械の動作が許容される領域として設定された動作限定領域を拘束条件として変換する限定領域変換を行うように構成され、
前記コントローラの前記指令演算は、前記拘束条件を逸脱しない範囲で前記偏差に基づき前記複数の油圧アクチュエータの速度指令値を演算するものである
ことを特徴とする建設機械。
【請求項8】
請求項2に記載の建設機械において、
前記コントローラは、前記目標速度演算の演算結果である前記作業具の目標速度又は前記目標座標列演算の演算結果である前記作業具の目標座標の時系列が示す前記作業具の移動方向が前記施工目標面に対して逸脱していると判断した場合には、前記指令演算において、前記予測モデルによる前記偏差を用いることなく、前記操作装置の操作に応じた前記複数の油圧アクチュエータの速度指令値を演算するように構成されている
ことを特徴とする建設機械。
【請求項9】
請求項2に記載の建設機械において、
視覚情報を表示する表示装置をさらに備え、
前記コントローラは、さらに、前記座標演算の演算結果である前記作業具の座標及び前記目標座標列演算の演算結果である前記作業具の目標座標の時系列を前記作業具の軌跡とする視覚情報として前記表示装置に表示させる軌跡表示を行うように構成されている
ことを特徴とする建設機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業具を含む複数の被駆動部材から構成される多関節型の作業装置を備えた建設機械に係り、更に詳しくは、作業装置の動作を所定の条件下において制御する建設機械に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
油圧ショベルなどの建設機械の分野では、建設施工に情報通信技術を適用することで多様な情報を効率的に活用して施工の合理化を図る情報化施工の導入が進められている。情報化施工に対応するため、複数の被駆動部材から構成された作業装置の位置や姿勢をオペレータへ表示するマシンガイダンスや、当該作業装置を施工目標面に沿って動くように制御するマシンコントロールなどのオペレータの運転操作を支援する機能(運転操作支援制御)を有する建設機械が開発されている。
【0003】
油圧ショベルの従来のマシンコントロールにおいては、ブームとアームとバケット(作業具)とで構成された作業装置の動作を制御するために、作業装置の構成部材をそれぞれ駆動する油圧アクチュエータの目標駆動量(例えば目標速度など)を演算する。このような従来のマシンコントロールにおいては、3次元空間内で作業装置のバケット(作業具)の爪先位置を制御するとき、機体の旋回動作を考慮しない場合には、作業装置の構成部材のうちの1つ(例えば、ブーム)をオペレータが操作すると、残りの2つの構成部材(アーム及びバケット)を駆動する2つの油圧アクチュエータがマシンコントロールの制御対象となる。この場合、バケットの爪先位置の自由度(2次元)とマシンコントロールの制御対象の油圧アクチュエータの数(2つ)とが一致する状況である。そのため、バケットの爪先位置を制御するとき、制御対象の2つの油圧アクチュエータのうちの一方の目標駆動量を設定すると、他方の目標駆動量が一意に定まる。それに対して、作業具をバケットからロータリチルトバケットに変更したときにマシンコントロールの範囲をこの変更に対応させようとすると、ロータリチルトバケットを駆動させる油圧アクチュエータの数(2つ)がバケットを駆動させる油圧アクチュエータの数(1つ)よりも多い分、マシンコントロールの制御対象の油圧アクチュータの数が増加する。この場合、作業装置の構成部材の1つをオペレータが操作したとき、制御対象の油圧アクチュータの数(3つ)が作業具の爪先位置の自由度(2次元)よりも大きくなる。このため、マシンコントロールの制御対象となる複数の油圧アクチュエータを同時にどうような目標駆動量の組み合わせで制御するかを適切に設定する必要がある。
【0004】
このような課題を解決するための有用な方策として、特許文献1に記載の技術を挙げることができる。特許文献1に記載の建設機械の制御システムは、施工対象の目標形状を示す設計面に沿って作業機(作業装置)のバケットを移動させるために、作業機の制御量の目標値と作業機の予測モデルとに基づいて作業機の制御量の予測値を算出し、当該予測値と設計面とに基づいて作業機を制御する駆動量を算出するものである。この制御システムは、オペレータが操作する操作装置の操作データに基づいて目標値を生成するものであり、運転支援機能に相当する制御を実行している。また、この制御システムは、モデル予測制御を活用した技術である。モデル予測制御は、多入力多出力系の制御を扱うことが可能であり、適切な評価関数を用いることで適切な制御入力の決定を可能とするものである。
【先行技術文献】
【特許文献】
【0005】
特開2020-125595号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の建設機械の制御システムにおいては、予測モデルの制御入力として作業機(作業装置)を駆動するトルクが用いられている。産業用ロボットのような多関節型の構造体の場合には、電動モータのトルクの印加により構造体の回動が可能である。しかし、油圧ショベルの多関節型の作業機の場合には、複数の油圧シリンダの伸縮によって作業装置の回動動作が実現されている。このため、特許文献1に記載の予測モデルによるトルク制御を油圧ショベルの作業機に実際に適用するためには、何らかの工夫が必要になる。
【0007】
また、特許文献1に記載のモデル予測制御によるトルク制御を何らかの工夫によって油圧ショベルの作業機に適用することができたとしても、モデル化誤差の影響が考慮されていないと、作業機を意図通りに制御することは容易ではない。なぜなら、特許文献1に記載の技術のように予測モデルとして用いられる運動方程式には、パラメータの同定が容易でない項(例えば、慣性力の項やコリオリ力の項)が含まれている。特許文献1に記載の技術においては、これらのパラメータが適切に設定されていない場合、オペレータが油圧ショベルを操作する意図がないとき、つまり、作業機の目標速度が0であるときに、特許文献1の記載の(11)式(予測モデルの状態方程式)を停止状態にするためのトルク(釣り合いトルク)と実際に必要な釣り合いトルクとが一致しなくなることで、作業機の意図しない動作が行われる懸念がある。このように、モデル化誤差の影響が考慮されていない場合には、作業機を意図通りに制御することは難しい。
【0008】
以上のように、特許文献1に記載の制御方法を油圧ショベルの作業装置(作業機)に対して実際に適用しようとすると、様々な課題が発生することが懸念される。しかし、特許文献1には、このような課題を解決するための工夫が示されていない。
【0009】
本発明は、以上のような課題を鑑みて発案されたものであり、その目的は、建設機械の動作制御に対して容易に適用可能である制御を実行する建設機械を提供することである。
【課題を解決するための手段】
【0010】
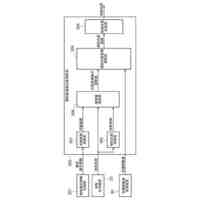
本願は、上記課題を解決する手段を複数含んでいる。本願の一例は、作業具を含む複数の被駆動部材により構成された多関節型の作業装置と、前記作業装置が回動可能に取り付けられた機体と、前記機体及び前記作業装置を駆動する複数の油圧アクチュエータと、前記機体及び前記作業装置の姿勢に関する情報を検出する姿勢検出装置と、前記複数の油圧アクチュエータの状態量に関する情報を検出する状態量検出装置と、前記機体及び前記作業装置の動作を制御するコントローラとを備えた建設機械において、前記コントローラは、前記姿勢検出装置からの検出情報に基づいて前記機体及び前記作業具の座標を演算する座標演算を行い、前記作業装置の作業対象として設定されている施工目標面と前記座標演算の演算結果である前記作業具の座標とを基に、所定条件を満たすように演算時点から所定の時間までの所定の時間区間における前記作業具の状態量の目標値である前記作業具の目標状態量の時系列を演算する目標状態量演算を行い、前記複数の油圧アクチュエータの速度を制御入力として前記作業具の状態量を予測可能な予測モデルを用いることで得られる前記所定の時間区間における前記作業具の状態量と前記目標状態量演算の演算結果である前記作業具の目標状態量の時系列との偏差に基づいて、前記複数の油圧アクチュエータの速度指令値を演算する指令演算を行い、前記状態量検出装置からの検出情報に基づいて得られる前記複数の油圧アクチュエータの実速度を前記指令演算の演算結果である前記複数の油圧アクチュエータの速度指令値に一致させるように前記複数の油圧アクチュエータの駆動を制御することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
24日前
日立建機株式会社
油圧機器
23日前
日立建機株式会社
作業車両
22日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
22日前
日立建機株式会社
作業機械
28日前
日立建機株式会社
作業機械
28日前
日立建機株式会社
作業機械
28日前
日立建機株式会社
建設機械
28日前
日立建機株式会社
作業車両
28日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
22日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
建設機械
28日前
日立建機株式会社
油圧機器
28日前
日立建機株式会社
作業機械
28日前
日立建機株式会社
転圧機械
22日前
日立建機株式会社
作業機械
22日前
日立建機株式会社
建設機械
22日前
日立建機株式会社
変速装置
21日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
17日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業車両
21日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
22日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ