TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111334
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024005709
出願日
2024-01-17
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
3/43 20060101AFI20250723BHJP(水工;基礎;土砂の移送)
要約
【課題】目標面を逸脱する可能性が無い場合は、不必要な速度制限を行わず、かつ、目標面への逸脱が想定されるような状態に変化しても適切に減速・停止制御を行うことで良好な操作性を確保できる作業機械を提供すること。
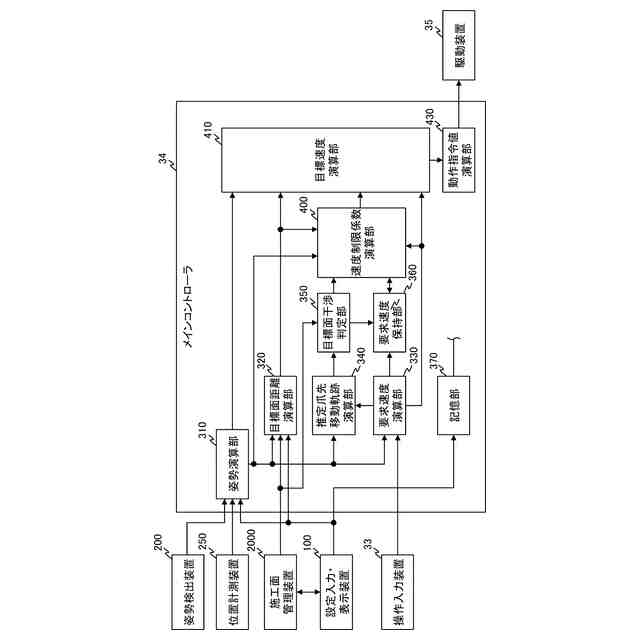
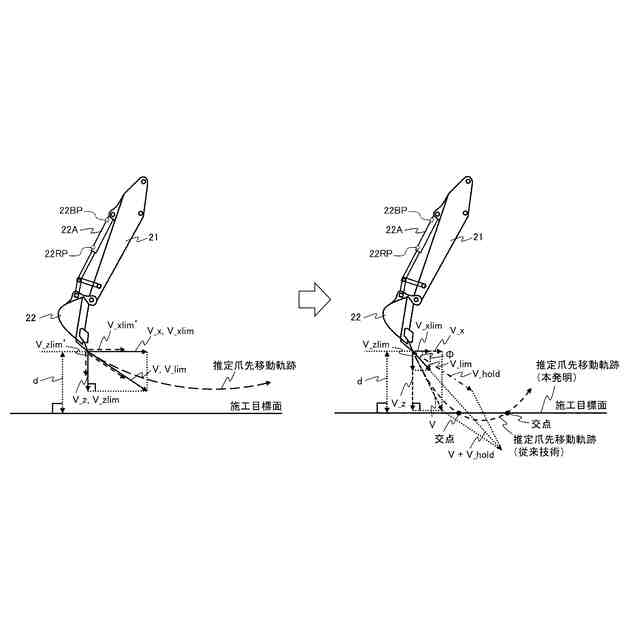
【解決手段】作業装置の姿勢と要求動作方向とに基づき、バケットの爪先の推定移動軌跡を演算するとともに目標面と推定移動軌跡との位置関係を演算し、演算された位置関係により推定移動軌跡が目標面と交わると判定した場合は、要求動作方向を維持したまま、バケットの爪先速度を制限し、演算された位置関係により推定移動軌跡が目標面と交わらないと判定した場合は、操作装置から出力された操作信号に基づいた爪先速度によりバケットの爪先速度を制御する。
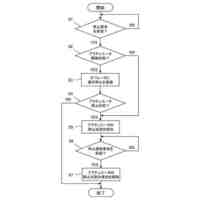
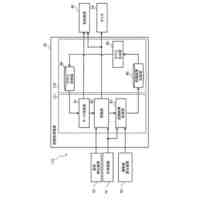
【選択図】 図3
特許請求の範囲
【請求項1】
走行体と、
前記走行体に対して旋回可能に設けられた上部旋回体と、
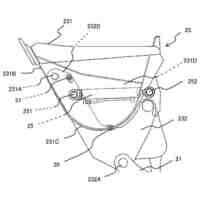
前記上部旋回体に取り付けられ、少なくとも上下方向に揺動自在なバケットを有する作業装置と、
前記上部旋回体と前記作業装置とをそれぞれ駆動するアクチュエータと、
前記アクチュエータを操作する操作装置と、
前記操作装置の操作量を検出する操作量検出装置と、
前記上部旋回体と前記作業装置の姿勢を検出する姿勢検出装置と、
前記バケットにより掘削する目標面を設定するための目標面設定装置と、
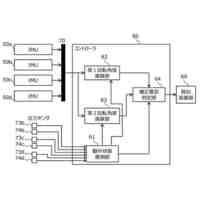
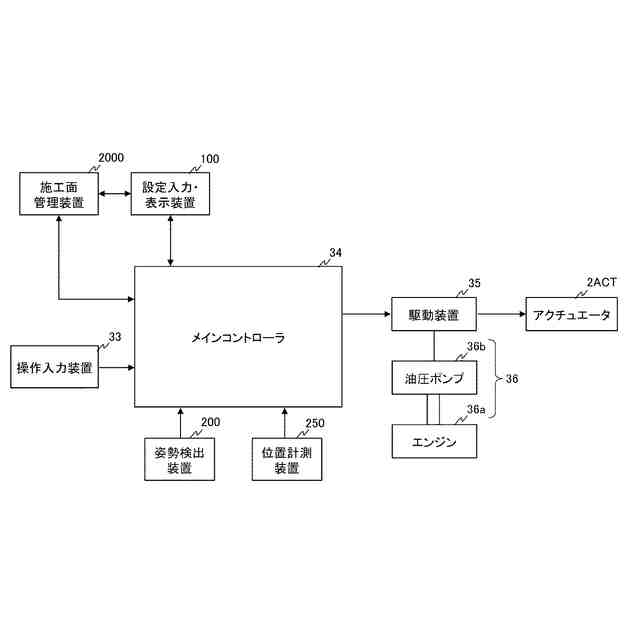
前記操作量検出装置により検出された操作量に基づいて前記バケットに対する要求動作方向を演算し、前記要求動作方向に基づいて前記バケットが前記目標面を超えないように前記アクチュエータの動作指令値を演算する制御装置と、
前記制御装置の動作指令値に基づいて前記アクチュエータを駆動させる駆動装置と、を有する作業機械において、
前記制御装置は、
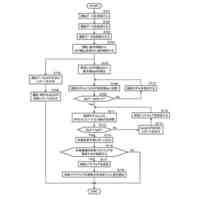
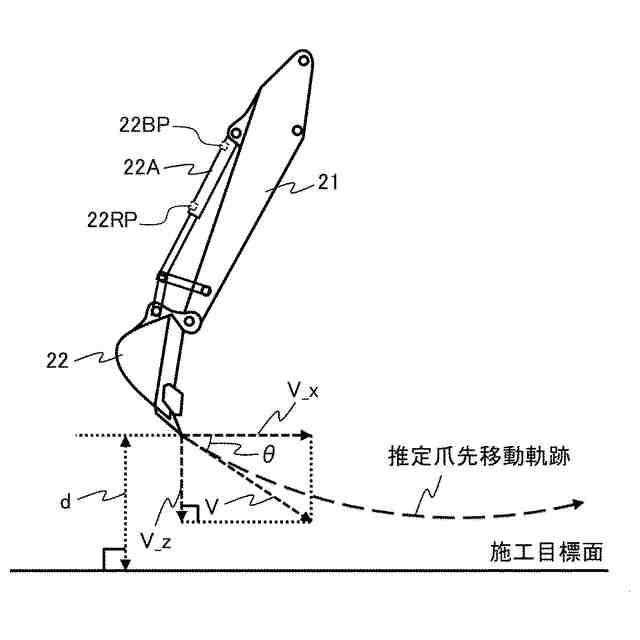
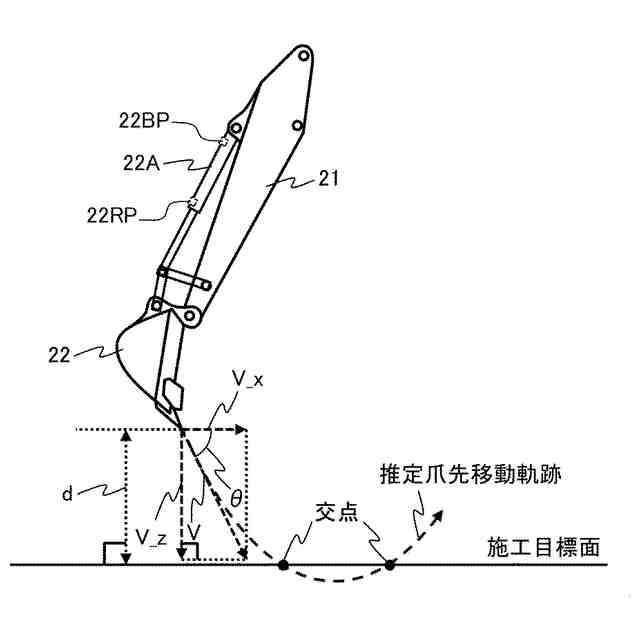
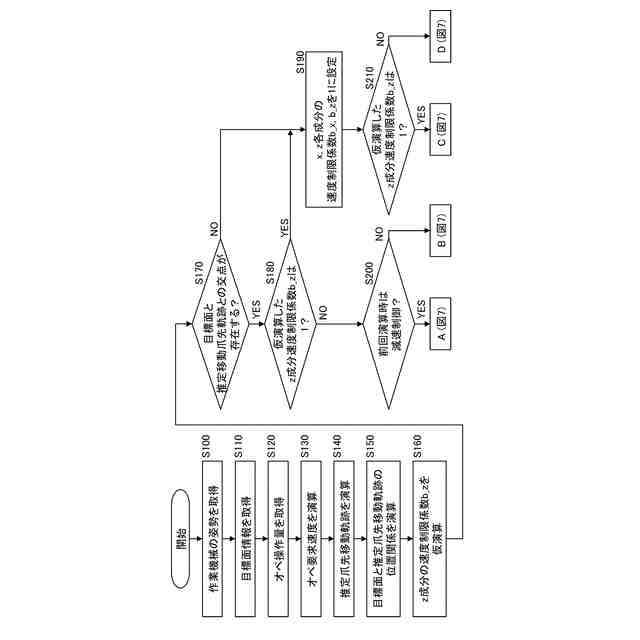
前記作業装置の姿勢と前記要求動作方向とに基づき、前記バケットの爪先の推定移動軌跡を演算するとともに前記目標面と前記推定移動軌跡との位置関係を演算し、
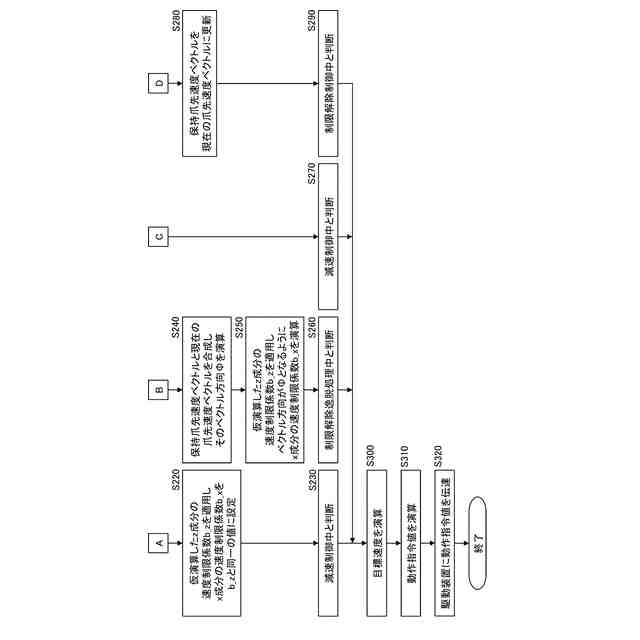
演算された位置関係により前記推定移動軌跡が前記目標面と交わると判定された場合は、要求動作方向を維持したまま、前記バケットの爪先速度を制限し、
演算された位置関係により前記推定移動軌跡が前記目標面と交わらないと判定された場合は、前記操作装置により出力された操作信号に基づいた爪先速度により前記バケットの爪先速度を制御することを特徴とする作業機械。
続きを表示(約 480 文字)
【請求項2】
請求項1記載の作業機械において、
前記制御装置は、
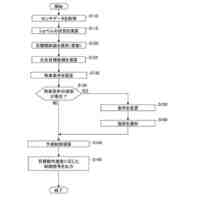
前記推定移動軌跡が前記目標面と交わらないと判定され、爪先速度が前記操作装置により出力された操作信号に基づいて制御されているときに、前記推定移動軌跡が前記目標面に交わる状態へと変化した場合には、前記要求動作方向と、姿勢センサから取得した値により演算される実爪先速度ベクトルとの合成ベクトル方向を基準として爪先目標速度を演算する、ことを特徴とする作業機械。
【請求項3】
請求項2記載の作業機械において、
前記制御装置は、
前記作業装置の質量を基に演算される補正値を用いて、前記実爪先速度ベクトルを補正する、ことを特徴とする作業機械。
【請求項4】
請求項1~3の何れか1項に記載の作業機械において、
前記制御装置は、
前記推定移動軌跡の有効長を、前記バケットの爪先を起点として予め定められる所定の値に設定し、
前記有効長の範囲で、前記目標面と前記推定移動軌跡との位置関係を演算する、ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
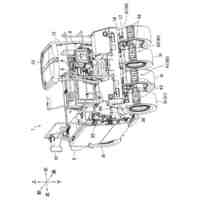
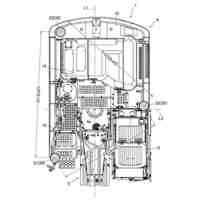
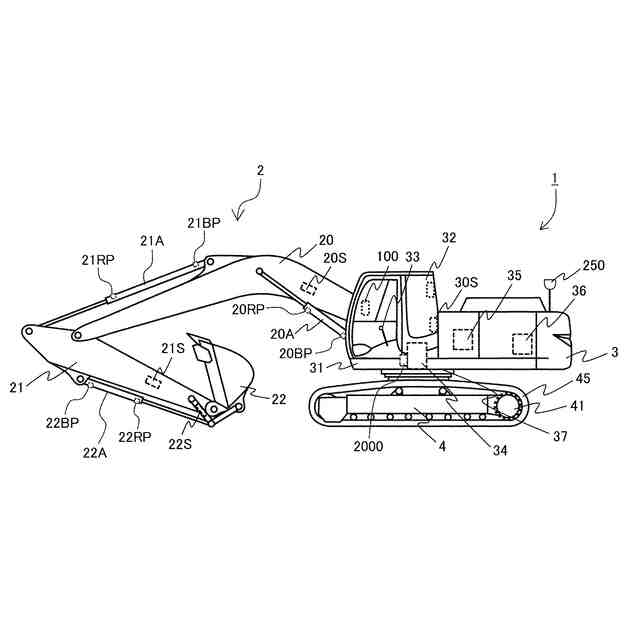
道路工事、建設工事、土木工事、浚渫工事等に使用される作業機械として、動力系により走行する走行体の上部に旋回体を旋回自在に取り付けた作業機械本体に多関節型の作業フロントを上下方向に揺動自在に取り付け、作業フロントを構成する各フロント部材をシリンダにて駆動するものが知られている。その一例としては、ブーム、アーム、バケット等から構成される作業フロントを有する、いわゆる油圧ショベルがある。また、この種の油圧ショベルには、掘削する施工目標面を予め設定し、バケットが施工目標面に沿って掘削できるように、オペレータのアーム動作の操作量に応じてブーム動作などを自動で制御する、いわゆるマシンコントロールを行うものがある。
【0003】
マシンコントロールは、コントローラがフロント動作を制御するとともに、オペレータが手動で操作をする半自動制御の機能であるため、制御精度に加え、オペレータ操作性も重要視されるものである。マシンコントロールに係る従来技術としては、例えば、特許文献1や特許文献2に記載のものが知られている。
【0004】
特許文献1には、目標面距離と作業具の目標速度とから、作業装置の制限速度を演算する際に、アームよりもブームの速度を制限することで、掘削の場面でオペレータの操作意思が強く表れるアームの速度制限を緩和し、オペレータの違和感を小さく抑える建設機械の制御システムが開示されている。
【0005】
特許文献2には、設定された目標面と位置センサおよび姿勢センサからの信号とに基づいて、アーム操作時に作業具が目標面に侵入する可能性があるか否かを判定し、作業具が目標面に侵入する可能性がないと判定された場合は、作業具の位置が目標面に近い状態であっても速度を減速しないように制御し、掘削面近傍において作業具を速く動かしたいというオペレータの操作意思をくみ取り、アームに対する制限を回避し、オペレータの違和感を小さく抑える作業機械が開示されている。
【先行技術文献】
【特許文献】
【0006】
国際公開第2014/167718号
国際公開第2021/064385号
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載された従来技術は、目標面に対する作業具の距離に応じて制限速度が演算されているため、目標面近傍においては、移動する爪先の軌跡が目標面を逸脱し得ないものであったとしても、動作速度が制限されてしまい、オペレータが速く動かしたいという意図と反した状態になることで操作性が悪化してしまうおそれがある。
【0008】
特許文献2に記載された従来技術は、侵入可否を姿勢状態や操作レバーの入力状態を基に判断し、作業装置の制限の可否を判断しているため、侵入しないと判断されて速度が制限されていない状態において、急に侵入可能性がある入力をされた場合は、急激な減速動作が必要になり、動作を止めきれずに目標面を逸脱したり、或いは、急激な減速によるショックが発生し、オペレータの操作性や作業性を損なうおそれがある。
【0009】
本発明は上記に鑑みてなされたものであり、本発明の目的は、目標面を逸脱する可能性が無い場合は、不必要な速度制限を行わず、かつ、目標面への逸脱が想定されるような状態に変化しても適切に減速・停止制御を行うことで良好な操作性を確保できる作業機械を提供することにある。
【課題を解決するための手段】
【0010】
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、走行体と、前記走行体に対して旋回可能に設けられた上部旋回体と、前記上部旋回体に取り付けられ、少なくとも上下方向に揺動自在なバケットを有する作業装置と、前記上部旋回体と前記作業装置とをそれぞれ駆動するアクチュエータと、前記アクチュエータを操作する操作装置と、前記操作装置の操作量を検出する操作量検出装置と、前記上部旋回体と前記作業装置の姿勢を検出する姿勢検出装置と、前記バケットにより掘削する目標面を設定するための目標面設定装置と、前記操作量検出装置により検出された操作量に基づいて前記バケットに対する要求動作方向を演算し、前記要求動作方向に基づいて前記バケットが前記目標面を超えないように前記アクチュエータの動作指令値を演算する制御装置と、前記制御装置の動作指令値に基づいて前記アクチュエータを駆動させる駆動装置と、を有する作業機械において、前記制御装置は、前記作業装置の姿勢と前記要求動作方向とに基づき、前記バケットの爪先の推定移動軌跡を演算するとともに前記目標面と前記推定移動軌跡との位置関係を演算し、演算された位置関係により前記推定移動軌跡が前記目標面と交わると判定された場合は、要求動作方向を維持したまま、前記バケットの爪先速度を制限し、演算された位置関係により前記推定移動軌跡が前記目標面と交わらないと判定された場合は、前記操作装置により出力された操作信号に基づいた爪先速度により前記バケットの爪先速度を制御するものとする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
19日前
日立建機株式会社
転圧機械
19日前
日立建機株式会社
建設機械
19日前
日立建機株式会社
建設機械
19日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
変速装置
18日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
19日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業車両
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業車両
14日前
日立建機株式会社
作業車両
19日前
日立建機株式会社
映像記録装置
18日前
日立建機株式会社
運用管理装置
18日前
日立建機株式会社
ホイールローダ
18日前
日立建機株式会社
ホイールローダ
18日前
日立建機株式会社
遠隔制御システム
18日前
日立建機株式会社
建設発生土の管理システム
18日前
日立建機株式会社
可変容量型斜板式液圧回転機
19日前
日立建機株式会社
CO2排出量削減方針生成装置
18日前
日立建機株式会社
鉱山管理装置及び鉱山管理方法
18日前
日立建機株式会社
映像再生装置、映像共有システム
18日前
日立建機株式会社
運搬車両認識システム及び作業機械
5日前
日立建機株式会社
作業機械管理システム及び作業機械
13日前
日立建機株式会社
リスク判定装置及びリスク判定システム
18日前
日立建機株式会社
建設機械の制御装置および遠隔操作システム
18日前
FKS株式会社
擁壁
29日前
個人
建物の不同沈下の修正方法
5日前
鈴健興業株式会社
敷板部材
25日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
27日前
株式会社ネクステリア
平板基礎
25日前
千代田工営株式会社
回転貫入杭
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ