TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081128
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194683
出願日
2023-11-15
発明の名称
歩行型作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
F02D
29/00 20060101AFI20250520BHJP(燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備)
要約
【課題】作業中において後進状態に切り換わる際に煩わしさなく運転操作の安定性を確保することが可能な歩行型作業機が要望されていた。
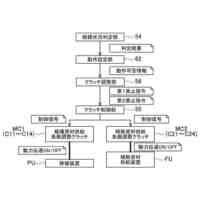
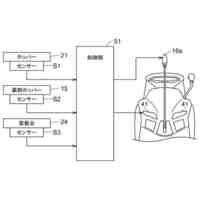
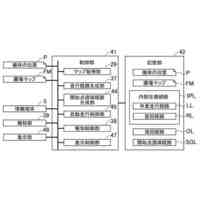
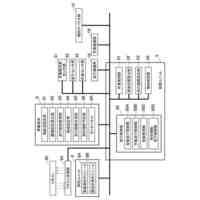
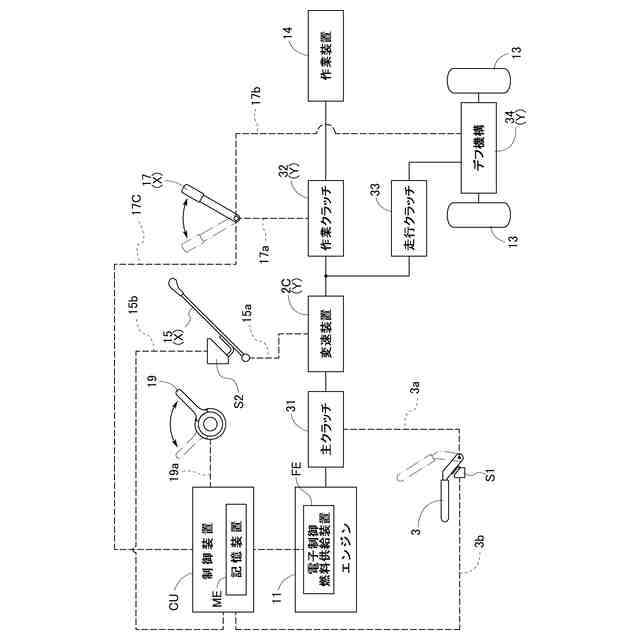
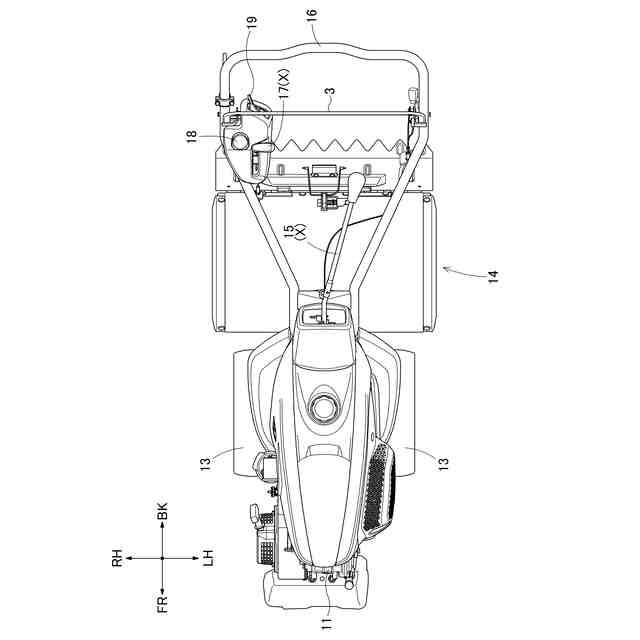
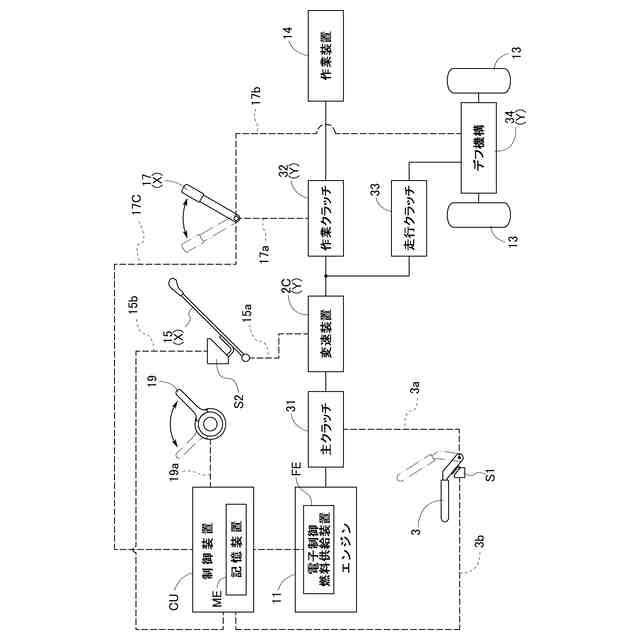
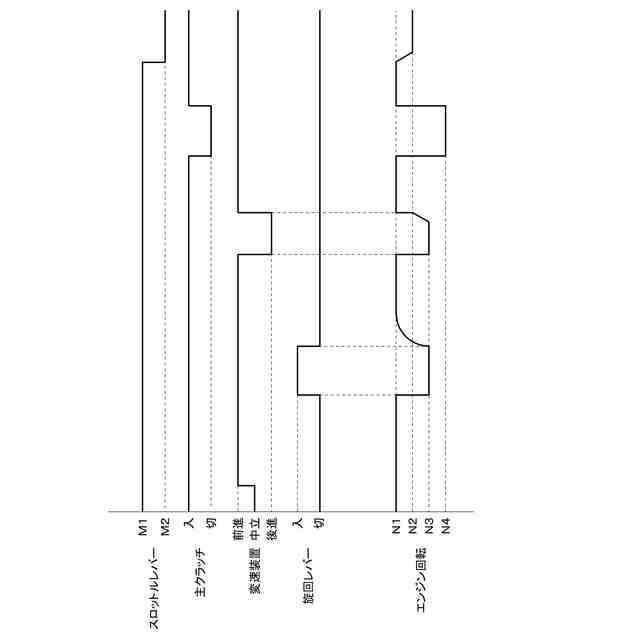
【解決手段】出力回転を変更可能な駆動源11からの動力を走行装置13へ伝達すると共に走行装置13の前進と後進とを切り換え可能な変速装置2Cと、人為操作により駆動源11の目標速度を設定可能な速度設定手段19と、変速装置2Cが前進状態であるか後進状態であるかを検知する前後進検知手段S2と、駆動源11の作動を制御する制御装置CUと、が備えられ、制御装置CUは、前後進検知手段S2の検出結果に基づいて、前進状態が検出されると、目標速度になるように駆動源11の作動を制御し、前進状態から後進状態への遷移が検出されると、目標速度よりも低速の設定速度になるように駆動源11の作動を制御する。
【選択図】図3
特許請求の範囲
【請求項1】
走行装置と、
出力回転を変更可能な駆動源と、
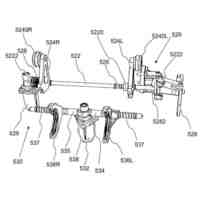
前記駆動源からの動力を前記走行装置へ伝達すると共に前記走行装置の前進と後進とを切り換え可能な変速装置と、
人為操作により前記駆動源の目標速度を設定可能な速度設定手段と、
前記変速装置が前進状態であるか後進状態であるかを検知する前後進検知手段と、
前記駆動源の作動を制御する制御装置と、が備えられ、
前記制御装置は、前記前後進検知手段の検出結果に基づいて、前記前進状態が検出されると、前記目標速度になるように前記駆動源の作動を制御し、前記前進状態から前記後進状態への遷移が検出されると、前記目標速度よりも低速の設定速度になるように前記駆動源の作動を制御する歩行型作業機。
続きを表示(約 400 文字)
【請求項2】
前記変速装置を入り切り操作可能な人為操作式の操作具が備えられ、
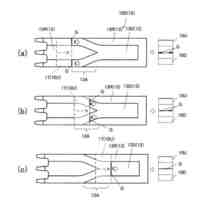
前記前後進検知手段は、前記操作具が前進位置に操作されたこと及び前記操作具が後進位置に操作されたことを検出する検知スイッチである請求項1に記載の歩行型作業機。
【請求項3】
前記制御装置は、前記走行装置の後進が開始するより前に前記設定速度になるように前記駆動源の作動を制御する請求項1に記載の歩行型作業機。
【請求項4】
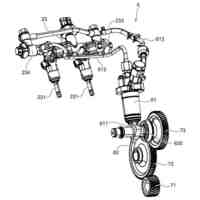
前記駆動源は、電子制御燃料噴射装置を備えるエンジンである請求項1に記載の歩行型作業機。
【請求項5】
前記制御装置は、前記前進状態から前記後進状態への遷移が検出されて前記設定速度になるように前記駆動源の作動を制御した後、前記設定速度よりも高い出力回転となるように前記駆動源の作動を制御する請求項1から4のいずれか1項に記載の歩行型作業機。
発明の詳細な説明
【技術分野】
【0001】
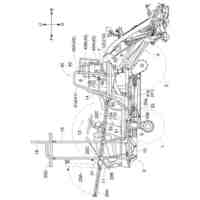
本発明は、例えば、歩行型管理機あるいは歩行型田植機等の歩行型作業機に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
歩行型作業機の一例としての歩行型管理機では、駆動源としてエンジンが搭載され、操縦ハンドルの近くにエンジン回転を調整するスロットルレバーが設けられる。そして、エンジンの出力回転はスロットルレバーにて設定される目標速度になるように調整される構成となっていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-170654号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場にて歩行型管理機により農作業が行われる際、オペレータは、操縦ハンドルを持って操縦すると共に、走行する歩行型作業機と共に歩行しながら耕耘作業を行う。このとき、スロットルレバーの設定値としては、機体を前進走行させながら作業を実行するときは、駆動負荷が大きいので、エンジンの出力回転は最大出力に近い高い出力回転が設定されるのが一般的である。ところで、作業状況により機体を前進させる状態から後進させる状態に切り換えることがある。このとき、スロットルレバーにて前進走行用の目標速度が設定されたままの状態であれば、後進走行を開始すると、エンジンを高い出力回転にて作動すると、高速で移動してオペレータによる運転操作が不安定になるおそれがある。
【0005】
後進に切り換わるときに、オペレータがスロットルレバーを操作してエンジンの出力回転を低減させることで、作業装置の速度を低減することは可能であるが、変速装置の切り換え操作も行わなければならず操作が煩雑となる。
【0006】
そこで、作業中において前進状態から後進状態に切り換わる際に煩わしさなく運転操作の安定性を確保することが可能な歩行型作業機が要望されていた。
【課題を解決するための手段】
【0007】
本発明に係る歩行型作業機の特徴構成は、走行装置と、出力回転を変更可能な駆動源と、前記駆動源からの動力を前記走行装置へ伝達すると共に前記走行装置の前進と後進とを切り換え可能な変速装置と、人為操作により前記駆動源の目標速度を設定可能な速度設定手段と、前記変速装置が前進状態であるか後進状態であるかを検知する前後進検知手段と、前記駆動源の作動を制御する制御装置と、が備えられ、前記制御装置は、前記前後進検知手段の検出結果に基づいて、前記前進状態が検出されると、前記目標速度になるように前記駆動源の作動を制御し、前記前進状態から前記後進状態への遷移が検出されると、前記目標速度よりも低速の設定速度になるように前記駆動源の作動を制御する点にある。
【0008】
本発明によれば、前後進検知手段の検出情報に基づいて制御装置が駆動源の作動を制御する。前進状態では速度設定手段にて設定された目標速度になるように駆動源の作動を制御する。そして、前進状態から後進状態への遷移が検出されると、目標速度よりも低速の設定速度になるように駆動源の作動を制御する。
【0009】
その結果、オペレータは変速装置の切り換え操作だけの操作で対応できるので、作業中において前進状態から後進状態に切り換わる際に煩わしさなく運転操作の安定性を確保することが可能となる。
【0010】
本発明においては、前記変速装置を入り切り操作可能な人為操作式の操作具が備えられ、前記前後進検知手段は、前記操作具が前進位置に操作されたこと及び前記操作具が後進位置に操作されたことを検出する検知スイッチであると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
9日前
株式会社クボタ
田植機
16日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業車
16日前
株式会社クボタ
コンバイン
22日前
株式会社クボタ
圃場作業車
11日前
株式会社クボタ
作物収穫機
19日前
株式会社クボタ
多目的車両
4日前
株式会社クボタ
電動作業車両
18日前
株式会社クボタ
歩行型作業機
11日前
株式会社クボタ
乗用型田植機
11日前
株式会社クボタ
電動作業車両
11日前
株式会社クボタ
電動作業車両
4日前
株式会社クボタ
嫌気性処理方法
2日前
株式会社クボタ
自動走行制御システム
16日前
株式会社クボタ
自動走行制御システム
16日前
株式会社クボタ
燃料噴射装置およびエンジン
15日前
株式会社クボタ
移植機及び苗ステーの固定方法
12日前
株式会社クボタ
作業機及びカバー部材の固定方法
10日前
株式会社クボタ
自動走行制御システムおよび作業車
16日前
株式会社クボタ
自動走行制御システム、及び作業車
16日前
株式会社クボタ
火格子およびストーカ式焼却炉の炉床
19日前
株式会社クボタ
水処理装置の運転方法および水処理装置
19日前
株式会社クボタ
走行制御システム、作業車、走行制御方法
16日前
株式会社クボタ
イオン濃度測定方法およびイオン濃度測定装置
2日前
株式会社クボタ
収穫残渣の保管方法およびメタン発酵処理方法
2日前
株式会社クボタ
作業車
11日前
株式会社クボタ
トラクタ
22日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
自動走行制御システム
16日前
株式会社クボタ
情報処理装置およびその汚れ検出方法、水処理システム、並びに汚れ検出プログラム
11日前
井関農機株式会社
EGR装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ