TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092674
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2025058919,2023111504
出願日
2025-03-31,2018-06-29
発明の名称
作業車両
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250612BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】運転者の状態に応じて適正に自動操舵の停止を行うことができるようにする。
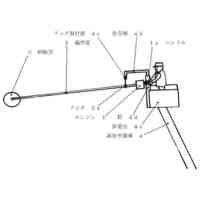
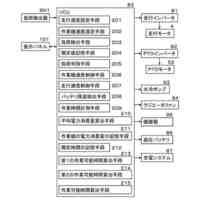
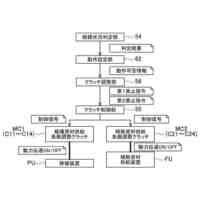
【解決手段】作業車両は、運転席と、ステアリングハンドルによる手動操舵と走行基準ラインに平行な走行予定ラインに一致するように進行方向の操舵を行うステアリングハンドルの自動操舵とのいずれかで走行可能な車体と、車体の位置を検出可能な測位装置と、測位装置で検出された車体の位置を走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、自動操舵と手動操舵とを切り換える操舵切換スイッチと、運転者の着座を検出する着座検出装置と、着座検出装置が着座を検出し且つ操舵切換スイッチによって手動操舵から自動操舵への切り換え操作があった場合に自動操舵を許可する制御装置と、運転者の離席の報知を行う報知装置とを備え、制御装置は、自動操舵が行われている場合において、着座検出装置が着座を検出していない場合に、自動操舵を停止する。
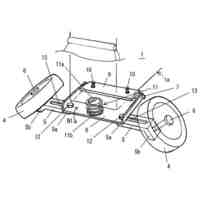
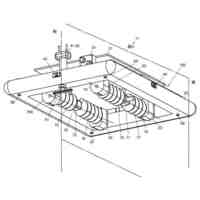
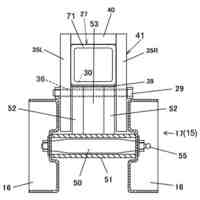
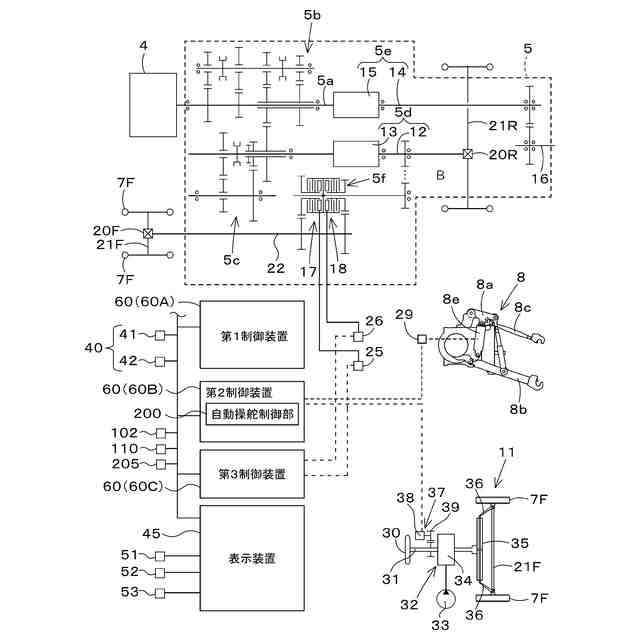
【選択図】図1
特許請求の範囲
【請求項1】
運転席と、
ステアリングハンドルと、
前記ステアリングハンドルによる手動操舵と、走行基準ラインに平行な走行予定ラインに一致するように進行方向の操舵を行う前記ステアリングハンドルの自動操舵とのいずれかで走行可能な車体と、
前記車体に設けられた原動機と、
前記原動機の動力により前記車体を走行させる走行装置と、
前記車体の位置を検出可能な測位装置と、
前記測位装置で検出された車体の位置を前記走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、
前記自動操舵と前記手動操舵とを切り換える操舵切換スイッチと、
運転者の着座を検出する着座検出装置と、
前記着座検出装置が前記着座を検出し且つ前記操舵切換スイッチによって手動操舵から自動操舵への切り換え操作があった場合に前記自動操舵を許可する制御装置と、
前記運転席から運転者が離席していることの報知を行う報知装置と、
を備え、
前記制御装置は、前記自動操舵が行われている場合において、前記着座検出装置が前記着座を検出していない場合に、前記自動操舵を停止する作業車両。
続きを表示(約 240 文字)
【請求項2】
前記制御装置は、前記自動操舵が行われている場合において、前記着座検出装置が前記着座を検出している着座検出状態から前記着座を検出していない離席検出状態に変化した場合に、前記報知装置によって前記報知を行い、前記離席検出状態の経過が予め定められた判定閾値を超えた場合に、前記車体の走行を停止する請求項1に記載の作業車両。
【請求項3】
前記報知装置は、前記離席検出状態の経過が長くなるにつれて、報知強度を大きくする請求項1又は2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、農作業機として特許文献1が知られている。特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。また、農作業機は、畝に沿って走行中に右指示ボタンを押した後、基準走行ラインの始点が設定され、走行中に左指示ボタンを押すことによって基準走行ラインの終点が設定される。即ち、自動操舵前に基準走行ラインの設定を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2017-123803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の農作業機では、切替スイッチによって手動走行から自動走行に切り換えることにより、簡単に自動走行を行うことができる。自動走行の開始や終了について、運転者の意思が反映されることが必要であり、自動走行中においても運転者の要求に対して安定的に操舵を行う必要がある。また、運転者が適正な状態で自動走行を行うことが求められていて、自動走行の開始、終了についても運転者が適正な状態であることが望ましい。
【0005】
そこで、本発明は上記問題点に鑑み、運転者の状態に応じて適正に自動操舵を行うことができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
【0007】
作業車両は、運転席と、ステアリングハンドルと、前記ステアリングハンドルによる手動操舵と、走行基準ラインに平行な走行予定ラインに一致するように進行方向の操舵を行う前記ステアリングハンドルの自動操舵とのいずれかで走行可能な車体と、前記車体に設けられた原動機と、前記原動機の動力により前記車体を走行させる走行装置と、前記車体の位置を検出可能な測位装置と、前記測位装置で検出された車体の位置を前記走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、前記自動操舵と前記手動操舵とを切り換える操舵切換スイッチと、運転者の着座を検出する着座検出装置と、前記着座検出装置が前記着座を検出し且つ前記操舵切換スイッチによって手動操舵から自動操舵への切り換え操作があった場合に前記自動操舵を許可する制御装置と、前記運転席から運転者が離席していることの報知を行う報知装置と、を備え、前記制御装置は、前記自動操舵が行われている場合において、前記着座検出装置が前記着座を検出していない場合に、前記自動操舵を停止する。
【0008】
前記制御装置は、前記自動操舵が行われている場合において、前記着座検出装置が前記着座を検出している着座検出状態から前記着座を検出していない離席検出状態に変化した場合に、前記報知装置によって前記報知を行い、前記離席検出状態の経過が予め定められた判定閾値を超えた場合に、前記車体の走行を停止する。
【0009】
前記報知装置は、前記離席検出状態の経過が長くなるにつれて、報知強度を大きくする。
【発明の効果】
【0010】
本発明によれば、運転者の状態に応じて適正に自動操舵の停止を行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
枝切機
25日前
個人
苗キャップ
22日前
個人
尿処理材
10日前
個人
飼槽
1か月前
個人
園芸用自走車
26日前
個人
ペット用フード容器
1か月前
株式会社アテックス
草刈機
18日前
個人
水耕栽培システム
19日前
株式会社アピア
ルアー
1か月前
井関農機株式会社
圃場管理装置
10日前
井関農機株式会社
圃場管理装置
10日前
井関農機株式会社
圃場管理装置
10日前
株式会社西部技研
空調システム
15日前
井関農機株式会社
圃場管理装置
2日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
2日前
株式会社シマノ
釣竿
12日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
18日前
個人
ペット用歯磨き用具セット
24日前
ダイハツ工業株式会社
草刈り機
22日前
関東農機株式会社
ロータリ管理機
18日前
合同会社小林知財研鑽処
液体空気散布船
19日前
井関農機株式会社
作業車両
10日前
三菱マヒンドラ農機株式会社
耕耘作業機
12日前
静岡油化工業株式会社
コケ育成樹脂
26日前
株式会社クボタ
歩行型作業機
11日前
株式会社クボタ
田植機
26日前
伯東株式会社
水処理組成物及び水処理方法
12日前
株式会社クボタ
作業車
16日前
株式会社ササキコーポレーション
農作業機
29日前
井関農機株式会社
水田管理システム
2日前
株式会社ササキコーポレーション
農作業機
29日前
株式会社ササキコーポレーション
農作業機
29日前
日工株式会社
除草具
22日前
レック株式会社
揮散体収納容器
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ