TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088006
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202395
出願日
2023-11-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250604BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
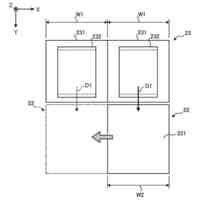
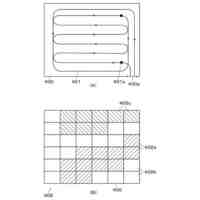
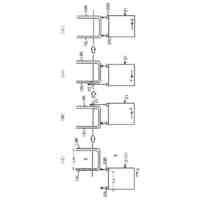
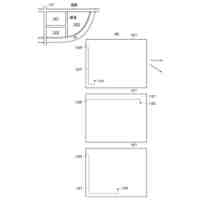
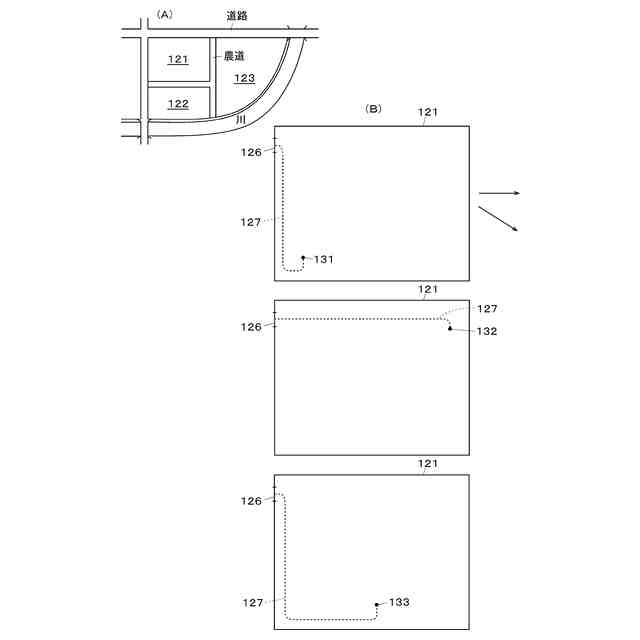
【課題】実際の圃場における作業に応じた経路を自動的に選択できるようにすること。
【解決手段】圃場(121~123)における作業内容と作業開始位置(131~133)と作業経路(141~143)とを対応付けた作業データが、1つの圃場(121~123)に対して複数登録されており、作業対象の圃場(121~123)における作業開始位置(131~133)を選択する入力がされた場合に、登録された作業データから選択された作業開始位置(131~133)に対応する作業内容と前記作業経路(141~143)に基づいて、作業経路(141~143)に沿って車両本体(1a)を案内することで、実際の圃場における作業に応じた経路を自動的に選択できる。
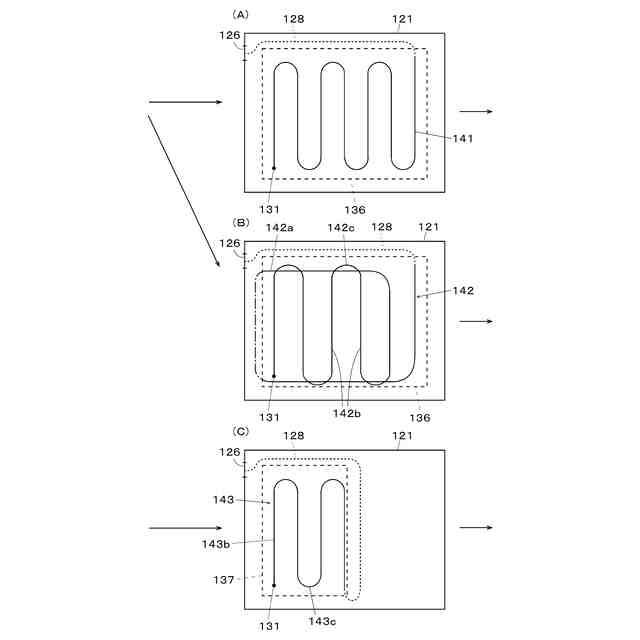
【選択図】図4
特許請求の範囲
【請求項1】
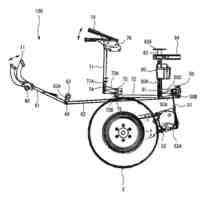
車両本体(1a)と、
前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、
を備え、
圃場(121~123)における作業内容と作業開始位置(131~133)と作業経路(141~143)とを対応付けた作業データが、1つの圃場(121~123)に対して複数登録されており、作業対象の圃場(121~123)における作業開始位置(131~133)を選択する入力がされた場合に、登録された作業データから選択された前記作業開始位置(131~133)に対応する前記作業内容と前記作業経路(141~143)に基づいて、前記作業経路(141~143)に沿って前記車両本体(1a)を案内する、
ことを特徴とする作業車両。
続きを表示(約 940 文字)
【請求項2】
前記車両本体(1a)の現在位置を計測する測位手段(212)と、
選択された作業開始位置(131~133)まで前記車両本体(1a)を案内する誘導経路に沿って、前記測位手段(212)での計測結果に基づいて、前記車両本体(1a)を自動走行させる制御手段(200)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記圃場(121~123)の外縁に沿って作業をしながら走行する周り経路(142a)と、前記周り経路(142a)の内側の領域において並行して設定された直線経路(142b)と、を有する前記作業経路(142)に対して、前記直線経路(142b)から前記周り経路(142a)に前記車両本体(1a)を自動走行させる制御手段(200)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
前記作業データには作業時の走行速度と前記作業機(18)の作業速度とが含まれており、自動走行時には前記作業データの走行速度および作業速度で制御するとともに、予め定められた領域では走行速度および作業速度が個別に設定可能である、
ことを特徴とする請求項1に記載の作業車両。
【請求項5】
前記車両本体(1a)を走行させるとともに、前記作業機(18)を作動させる駆動源(4)、
を備え、
前記走行速度に必要な第1の動力と、前記作業速度に必要な第2の動力の合算値が、予め定められた値に達する場合に、前記走行速度を減速する、
ことを特徴とする請求項4に記載の作業車両。
【請求項6】
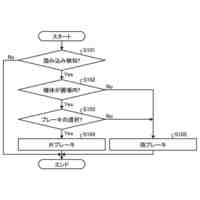
障害物(300)を検知する障害物検知手段(216)と、
前記障害物(300)を回避する操舵動作を、複数種の前記作業機(18)の幅に応じて登録しておき、前記車両本体(1a)に対する障害物(300)の位置と、前記車両本体(1a)に支持されている前記作業機(18)の幅と、に基づいて、前記障害物(300)を回避する操舵動作を、登録されている操舵動作の中から選択する制御手段(200)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、作業経路に沿って案内されて自動または手動で走行可能な作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
圃場マップに作業別のルートを作成、登録しておき、登録されたルートの中から実行するルートを選択して、作業を行う技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-106978号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、1つの圃場マップで異なる作業が行われる場合において、1つの作業は圃場全体を1つのルート(1連のルート)で走行することが前提となっている。したがって、圃場の出入口は共通であり、作業機の幅ごとに、外周の周回数や直線状の往復経路の往復回数等が異なるルートが複数作成される。
しかしながら、実際の圃場では、広い圃場では1日で作業が完了しない場合があったり、植え付けられる作物の種類によっては、圃場の一部分しか利用しない場合もあったりする。したがって、従来技術では、実際の圃場における使用状況に対応できない問題がある。
【0005】
本発明は、実際の圃場における作業に応じた経路を自動的に選択できるようにすることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
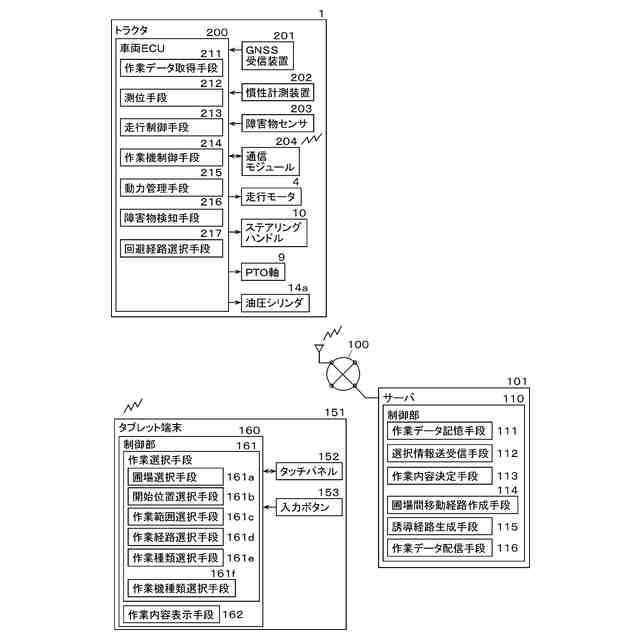
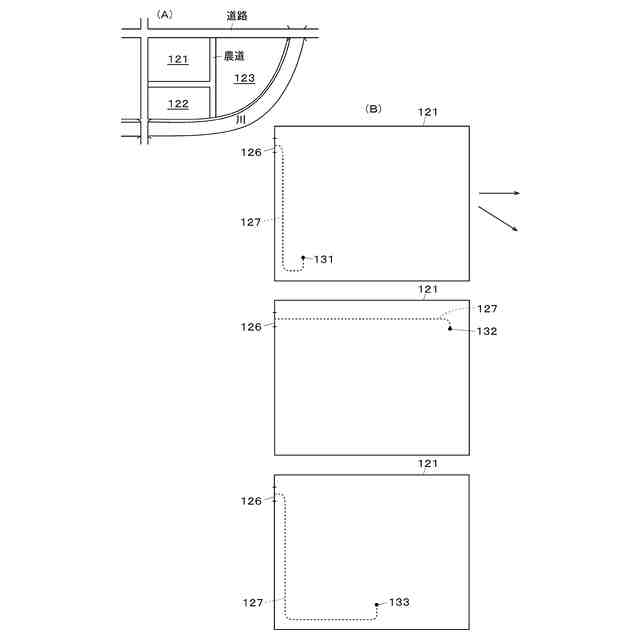
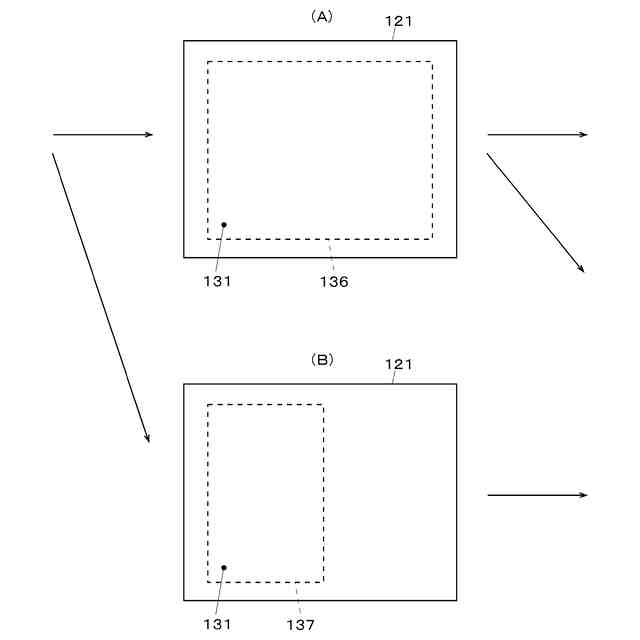
請求項1に記載の発明は、車両本体(1a)と、前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、を備え、圃場(121~123)における作業内容と作業開始位置(131~133)と作業経路(141~143)とを対応付けた作業データが、1つの圃場(121~123)に対して複数登録されており、作業対象の圃場(121~123)における作業開始位置(131~133)を選択する入力がされた場合に、登録された作業データから選択された前記作業開始位置(131~133)に対応する前記作業内容と前記作業経路(141~143)に基づいて、前記作業経路(141~143)に沿って前記車両本体(1a)を案内する、ことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記車両本体(1a)の現在位置を計測する測位手段(212)と、選択された作業開始位置(131~133)まで前記車両本体(1a)を案内する誘導経路に沿って、前記測位手段(212)での計測結果に基づいて、前記車両本体(1a)を自動走行させる制御手段(200)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記圃場(121~123)の外縁に沿って作業をしながら走行する周り経路(142a)と、前記周り経路(142a)の内側の領域において並行して設定された直線経路(142b)と、を有する前記作業経路(142)に対して、前記直線経路(142b)から前記周り経路(142a)に前記車両本体(1a)を自動走行させる制御手段(200)、を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記作業データには作業時の走行速度と前記作業機(18)の作業速度とが含まれており、自動走行時には前記作業データの走行速度および作業速度で制御するとともに、予め定められた領域では走行速度および作業速度が個別に設定可能である、ことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記車両本体(1a)を走行させるとともに、前記作業機(18)を作動させる駆動源(4)、を備え、前記走行速度に必要な第1の動力と、前記作業速度に必要な第2の動力の合算値が、予め定められた値に達する場合に、前記走行速度を減速する、ことを特徴とする請求項4に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
移植機
1か月前
井関農機株式会社
田植機
23日前
井関農機株式会社
移植機
2か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
調製設備
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
農作業機
29日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
作業車両
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ