TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101310
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218076
出願日
2023-12-25
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01G
9/14 20060101AFI20250630BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
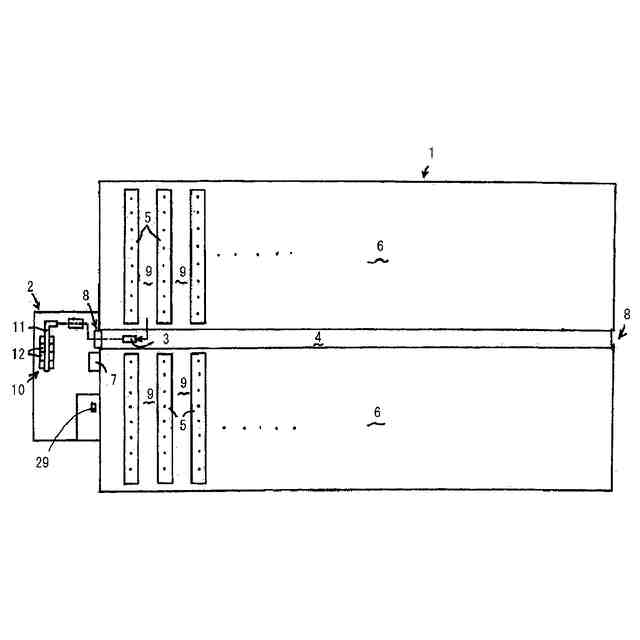
【課題】精度良く作業通路に進入して作業できる栽培設備用の作業車両を提供することを課題とする。
【解決手段】
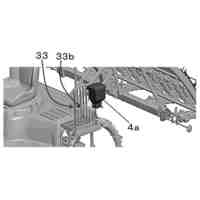
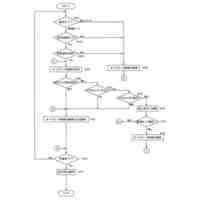
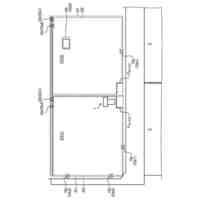
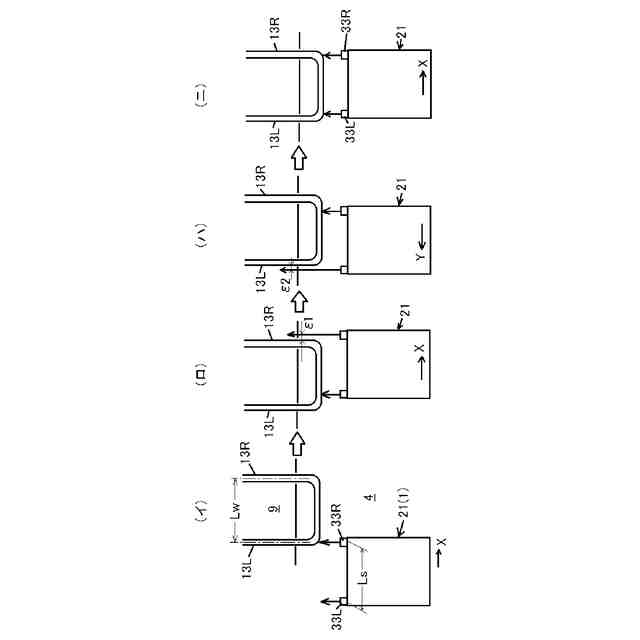
制御装置Cは、走行車体21が走行駆動モータ31の正転駆動によって移動通路4を所定方向に移動し走行車体21移動に従って先行する一方の作業通路進入位置検知センサ33Rが一方の被検知体13Rを検知しその後これを超えて被検知体13Rの非検知位置で一旦停止し、次いで走行駆動モータ31の逆転駆動によって走行車体21を所定方向とは逆方向に移動し後行する他方の作業通路進入位置検知センサ33Lが他方の被検知体13Lを検知しその後これを超えて被検知体13Lの非検知位置で停止し、再び所定方向に移動すべく走行出力すると共に、一対の作業通路進入位置検知センサ33L,33Rがそれぞれ被検知体13L,13Rを検知する位置を作業通路進入位置と判定する。
【選択図】 図6
特許請求の範囲
【請求項1】
多数の栽培ベッド(5)間の各作業通路(9)と栽培ベッド(5)の端部で各作業通路(9)に通じる移動通路(4)を備え、移動通路(4)を移動しながら作業通路(9)への進入位置を検知する作業通路進入位置検知センサ(33)を設け、移動通路(4)走行時に作業通路進入位置を検知すると作業車体(21)を停止する構成とした作業車両において、前記作業通路進入位置検知センサ(33L,33R)を左右一対に設け、これらの間隔(Ls)を作業通路(9)の左右一対の被検知体(13)の間隔(Lw)とほぼ等しく設け、制御装置(C)は左右の作業通路進入位置検知センサ(33L,33R)の検知入力を受けて作業通路進入位置と判定する構成とした作業車両。
続きを表示(約 670 文字)
【請求項2】
制御装置(C)は、走行車体(21)が走行駆動モータ(31)の正転駆動によって移動通路(4)を所定方向(X)に移動し走行車体(21)移動に従って先行する一方の作業通路進入位置検知センサ(33R)が、先行する側の一方の被検知体(13R)を検知しその後これを超えて被検知体(33R)の非検知位置で一旦停止し、次いで走行駆動モータ(31)の逆転駆動によって走行車体(21)を所定方向とは逆方向(Y)に移動し後行する他方の作業通路進入位置検知センサ(33L)が後行する側の他方の被検知体(13L)を検知しその後これを超えて被検知体(33L)の非検知位置で停止し、再び所定方向(X)に移動すべく走行出力すると共に、一対の作業通路進入位置検知センサ(33L,33R)がそれぞれ対応する被検知体(13L,13R)を検知する位置を作業通路進入位置と判定する構成とした請求項1に記載の作業車両。
【請求項3】
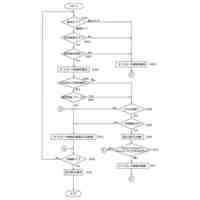
前方障害物検知センサ(36)を設け、制御装置(C)は、前記作業通路進入位置検知センサ(33L,33R)によって走行車体(21)が所定作業通路(9)の入口に達したと判定されると前方障害物検知センサ(36)の検知情報の信号入力をもってこの所定作業通路(9)に障害物(Q)があるか否かを判定し、障害物(Q)を検知しない場合は進入を許容し、障害物(Q)を検知する場合は当該作業通路(9)への進入を禁止し、次の作業通路(9)入口を検知すべく移動通路(4)を走行するよう構成した請求項1又は請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
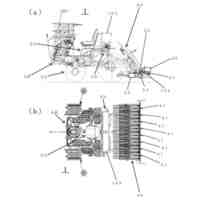
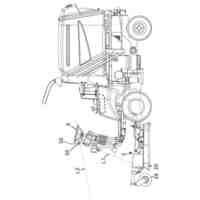
本発明は、植物栽培施設において、収穫作物を収納する収納バケットを運搬する運搬車両等の作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
植物栽培施設において、走行車体の前方に左右一対の作業通路進入位置検知センサを設け、移動通路を走行車体が横向く状態で進むとき、進行前方向側及び進行後方向側において作業通路進入位置検知センサによるレール検知の有無に基づいて進入位置に達したか否かを判定する構成がある(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-89591号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1によると、走行車体の移動通路を横向き走行することによって先行する作業通路進入位置検知センサは一対のうち一方のレールを検知し、走行車体の継続する横向き走行によって、この作業通路進入位置検知センサが他方のレールを通過するとこれを検知する。同時に遅れて走行する作業通路進入位置検知センサのレールの未検知を条件として、走行車体が所定作業通路の入口に達したものと判定する構成である。一のセンサのレール未検知を条件とするから誤検知の恐れがある。
【0005】
本発明は、上記に鑑み精度良く作業通路に進入して作業できる栽培設備用の作業車両を提供する。
【課題を解決するための手段】
【0006】
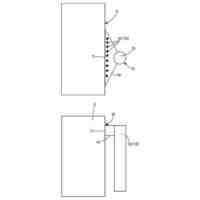
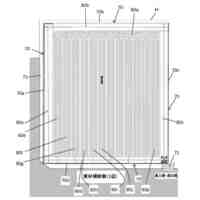
かかる課題を解決するために、請求項1記載の発明は、多数の栽培ベッド5間の各作業通路9と栽培ベッド5の端部で各作業通路9に通じる移動通路4を備え、移動通路4を移動しながら作業通路9への進入位置を検知する作業通路進入位置検知センサ33を設け、移動通路4走行時に作業通路進入位置を検知すると作業車体21を停止する構成とした作業車両において、前記作業通路進入位置検知センサ33L,33Rを左右一対に設け、これらの間隔Lsを作業通路9の左右一対の被検知体13の間隔Lwとほぼ等しく設け、制御装置Cは左右の作業通路進入位置検知センサ33L,33Rの検知入力を受けて作業通路進入位置と判定する。
【0007】
請求項2に記載の発明は、請求項1に記載の発明において、制御装置Cは、走行車体21が走行駆動モータ31の正転駆動によって移動通路4を所定方向Xに移動し走行車体21移動に従って先行する一方の作業通路進入位置検知センサ33Rが、先行する側の一方の被検知体33Rを検知しその後これを超えて被検知体13Rの非検知位置で一旦停止し、次いで走行駆動モータ31の逆転駆動によって走行車体21を所定方向とは逆方向Yに移動し後行する他方の作業通路進入位置検知センサ33Lが後行する側の他方の被検知体13Lを検知しその後これを超えて被検知体33Lの非検知位置で停止し、再び所定方向Xに移動すべく走行出力すると共に、一対の作業通路進入位置検知センサ33L,33Rがそれぞれ対応する被検知体13L,13Rを検知する位置を作業通路進入位置と判定する構成とする。
【0008】
請求項3に記載の発明は、請求項1又は請求項2に記載の発明において、前方障害物検知センサ36を設け、制御装置Cは、前記作業通路進入位置検知センサ33L,33Rによって走行車体21が所定作業通路9の入口に達したと判定されると前方障害物検知センサ36の検知情報の信号入力をもってこの所定作業通路9に障害物Qがあるか否かを判定し、障害物Qを検知しない場合は進入を許容し、障害物Qを検知する場合は当該作業通路9への進入を禁止し、次の作業通路9入口を検知すべく移動通路4を走行するよう構成した。
【発明の効果】
【0009】
請求項1及び請求項2に記載の発明によると、作業通路への進入位置で正確に作業車両を停止させることができ、作業通路への進入が正確に行える。
【0010】
請求項3に記載の発明によると、障害物の存在を検出するとその作業通路における作業は行わず、次の作業通路9向かうため、作業中断無く迅速に作業できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
2か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
農作業機
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
エンジン
20日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
農作業機
12日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
苗移植機
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
コンバイン
2か月前
井関農機株式会社
乗用芝刈機
2か月前
井関農機株式会社
圃場作業機
5日前
井関農機株式会社
野菜収穫機
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ