TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125766
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021917
出願日
2024-02-16
発明の名称
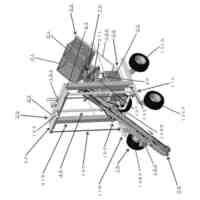
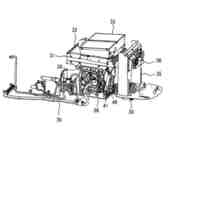
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
B62D
6/00 20060101AFI20250821BHJP(鉄道以外の路面車両)
要約
【課題】 従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。より具体的には、従来の作業車両については、旋回にともなうマニュアル操作はしばしばかなりの経験を必要とすることに本発明者は気付いた。
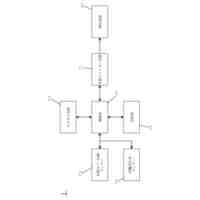
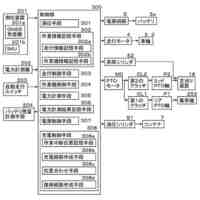
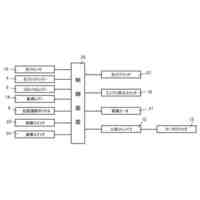
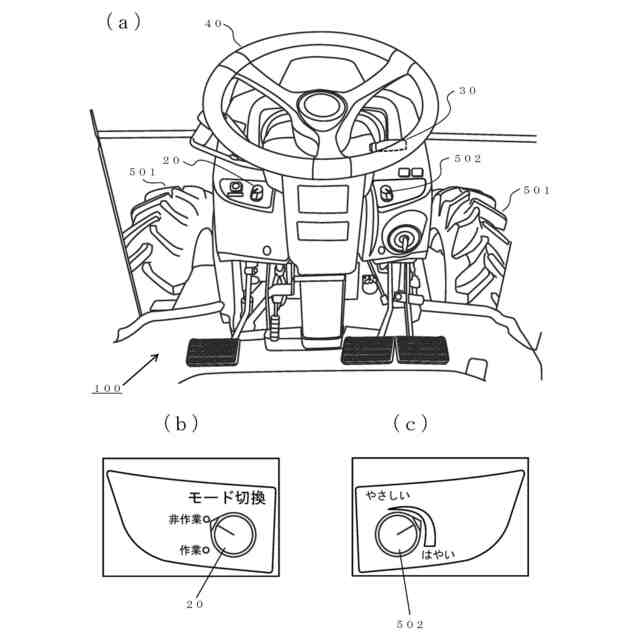
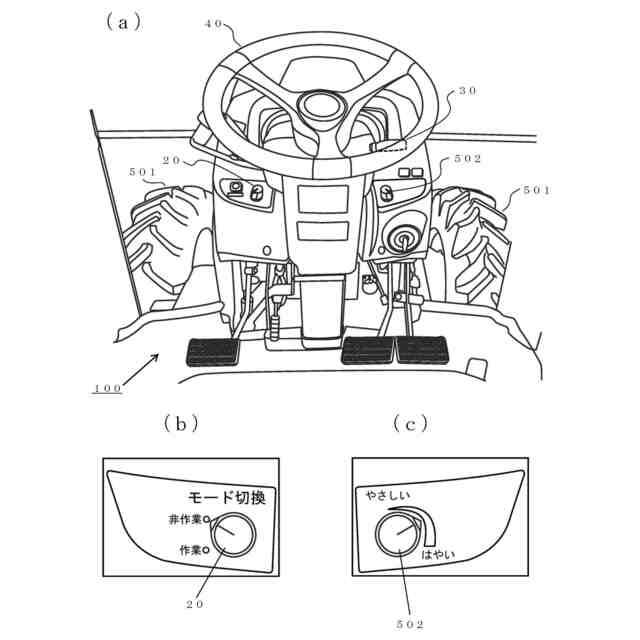
【解決手段】 少なくとも作業モードを選択する作業モード選択部20と、少なくとも旋回を開始する指示を行う旋回指示部30と、作業モードが作業モード選択部20により選択されている場合において、旋回を開始する指示が旋回指示部30により行われたとき、車輪ステアリング角度をあらかじめ定められた旋回車輪ステアリング角度と一致させる旋回制御を開始するコントローラー10と、を備えているトラクターである。
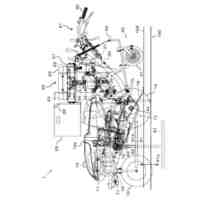
【選択図】 図6
特許請求の範囲
【請求項1】
少なくとも作業モードを選択する作業モード選択部と、
少なくとも旋回を開始する指示を行う旋回指示部と、
前記作業モードが前記作業モード選択部により選択されている場合において、前記旋回を開始する前記指示が前記旋回指示部により行われたとき、車輪ステアリング角度をあらかじめ定められた旋回車輪ステアリング角度と一致させる旋回制御を開始するコントローラーと、
を備えていることを特徴とする作業車両。
続きを表示(約 1,100 文字)
【請求項2】
前記旋回指示部は、少なくとも左旋回および右旋回の内の何れかの前記指示を行うスイッチであることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記旋回指示部は、前記左旋回および前記右旋回ならびに旋回オフの内の何れかの前記指示を行うスイッチであり、
前記作業モードが前記作業モード選択部により選択されている場合において、前記左旋回および前記右旋回の内の何れかの前記指示が前記旋回指示部により行われ、その後、前記旋回オフの前記指示が前記旋回指示部により行われたとき、前記コントローラーは、前記旋回制御を終了し、前記車輪ステアリング角度を直進車輪ステアリング角度と一致させる直進車輪ステアリング角度復帰制御を行うことを特徴とする請求項2に記載の作業車両。
【請求項4】
ステアリングホイールをさらに備えており、
前記作業モードが前記作業モード選択部により選択されている場合において、前記左旋回および前記右旋回の内の何れかの前記指示が前記旋回指示部により行われたとき、前記コントローラーは前記ステアリングホイールの角度の変化を無視するためのステアリングホイール角度キャンセル制御を行い、その後、前記旋回オフの前記指示が前記旋回指示部により行われたとき、前記コントローラーは、前記直進車輪ステアリング角度復帰制御を完了させて前記ステアリングホイールの前記角度を直進ステアリングホイール角度と一致させた後、前記ステアリングホイール角度キャンセル制御を解除することを特徴とする請求項3に記載の作業車両。
【請求項5】
ステアリングホイールをさらに備えており、
前記作業モードが前記作業モード選択部により選択されている場合において、前記左旋回および前記右旋回の内の何れかの前記指示が前記旋回指示部により行われたとき、前記コントローラーは前記ステアリングホイールの角度を直進ステアリングホイール角度で固定するためのステアリングホイール角度ロック制御を行い、その後、前記旋回オフの前記指示が前記旋回指示部により行われたとき、前記コントローラーは、前記直進車輪ステアリング角度復帰制御を完了させた後、前記ステアリングホイール角度ロック制御を解除することを特徴とする請求項3に記載の作業車両。
【請求項6】
前記旋回制御が開始された後、前記車輪ステアリング角度が前記あらかじめ定められた旋回車輪ステアリング角度と一致させられるまでの時間は調節可能であることを特徴とする請求項4または5に記載の作業車両。
【請求項7】
前記旋回指示部は、ウィンカースイッチであることを特徴とする請求項6に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
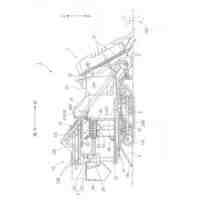
本発明は、トラクターのような作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
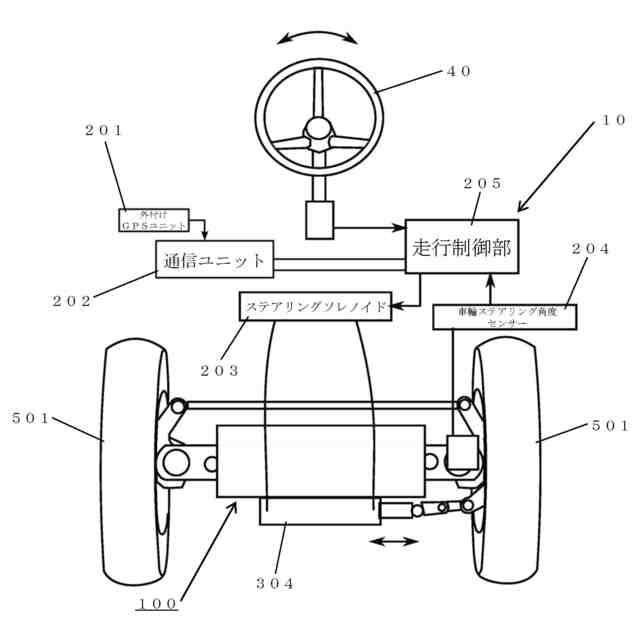
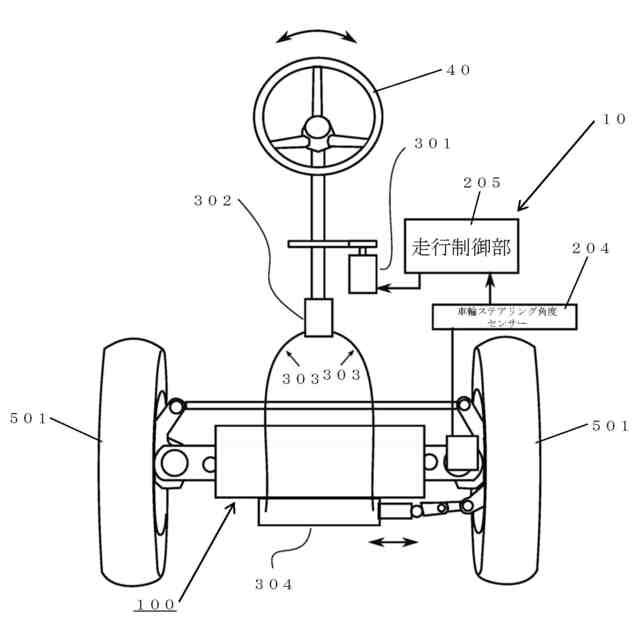
操舵輪を有する走行車体と、運転者が操作するステアリングホイールと、ステアリングホイールの操作量を検出する操舵センサーと、操舵輪を操向操舵するステアリング装置と、操舵センサーの検出値に応じてステアリング装置を制御する制御部と、走行車体に装着された作業機と、作業機を昇降する昇降装置と、昇降装置の昇降位置を検出する昇降センサーとを備え、制御部は、昇降センサーによって検出された昇降装置の昇降位置が所定位置以上に上昇した場合、昇降装置の昇降位置が所定位置未満の場合よりも操舵センサーの検出値に対するステアリング装置による操舵輪の操舵比を大きくする作業車両が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-158461号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、ユーザーのさまざまなニーズを考慮し、便利な機能が作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、従来の作業車両については、旋回にともなうマニュアル操作はしばしばかなりの経験を必要とすることに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、少なくとも作業モードを選択する作業モード選択部と、
少なくとも旋回を開始する指示を行う旋回指示部と、
前記作業モードが前記作業モード選択部により選択されている場合において、前記旋回を開始する前記指示が前記旋回指示部により行われたとき、車輪ステアリング角度をあらかじめ定められた旋回車輪ステアリング角度と一致させる旋回制御を開始するコントローラーと、
を備えていることを特徴とする作業車両である。
【0009】
第2の本発明は、前記旋回指示部は、少なくとも左旋回および右旋回の内の何れかの前記指示を行うスイッチであることを特徴とする第1の本発明の作業車両である。
【0010】
第3の本発明は、前記旋回指示部は、前記左旋回および前記右旋回ならびに旋回オフの内の何れかの前記指示を行うスイッチであり、
前記作業モードが前記作業モード選択部により選択されている場合において、前記左旋回および前記右旋回の内の何れかの前記指示が前記旋回指示部により行われ、その後、前記旋回オフの前記指示が前記旋回指示部により行われたとき、前記コントローラーは、前記旋回制御を終了し、前記車輪ステアリング角度を直進車輪ステアリング角度と一致させる直進車輪ステアリング角度復帰制御を行うことを特徴とする第2の本発明の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
24日前
井関農機株式会社
水田作業機
11日前
井関農機株式会社
圃場作業機
1日前
井関農機株式会社
根菜類収穫機
12日前
井関農機株式会社
乗用型苗植機
1日前
井関農機株式会社
歩行型耕運機
1か月前
井関農機株式会社
乗用型苗植機
10日前
井関農機株式会社
汎用コンバイン
1か月前
井関農機株式会社
乗用型苗移植機
1か月前
井関農機株式会社
自動精米洗米炊飯機
1日前
井関農機株式会社
穀稈の刈取作業方法
1か月前
井関農機株式会社
電動式移植作業車両
1か月前
井関農機株式会社
乗用作業車の操縦装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ