TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025160020
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024062964
出願日
2024-04-09
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20251015BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業効率の低下を抑制することができる作業車両を提供すること。
【解決手段】実施形態に係る作業車両は、測位装置によって測定された自己位置に基づいて圃場内の自動運転が可能な作業車両であって、測位装置または圃場の形状を含む圃場情報を有する圃場マップから圃場の第1外周情報を取得する制御装置を有し、制御装置は、作業者の手動運転による圃場内を周回する走行経路から圃場の第2外周情報を取得し、第1外周情報と第2外周情報とを比較し、第1外周情報と第2外周情報との差が所定以上の場合には自動運転を禁止する。
【選択図】図3
特許請求の範囲
【請求項1】
測位装置によって測定された自己位置に基づいて圃場内の自動運転が可能な作業車両であって、
前記測位装置または前記圃場の形状を含む圃場情報を有する圃場マップから前記圃場の第1外周情報を取得する制御装置を有し、
前記制御装置は、作業者の手動運転による前記圃場内を周回する走行経路から前記圃場の第2外周情報を取得し、前記第1外周情報と前記第2外周情報とを比較し、前記第1外周情報と前記第2外周情報との差が所定以上の場合には自動運転を禁止する、
ことを特徴とする作業車両。
続きを表示(約 1,300 文字)
【請求項2】
測位装置によって測定された自己位置に基づいて圃場内の自動運転が可能な作業車両であって、
前記測位装置または前記圃場の形状を含む圃場情報を有する圃場マップから前記圃場の第1外周情報を取得する制御装置を有し、
前記制御装置は、作業者の手動運転による前記圃場内を周回する走行経路から前記圃場の第2外周情報を取得し、前記第1外周情報と前記第2外周情報とを比較し、前記第1外周情報と前記第2外周情報との差が所定以上の場合には、前記第1外周情報における前記圃場の外周を含まない内側のみ自動運転を許可する、
ことを特徴とする作業車両。
【請求項3】
測位装置によって測定された自己位置に基づいて圃場内の自動運転が可能な作業車両であって、
前記測位装置または前記圃場の形状を含む圃場情報を有する圃場マップから前記圃場の第1外周情報を取得する制御装置を有し、
前記制御装置は、作業者の手動運転による前記圃場内を周回する走行経路から前記圃場の第2外周情報を取得し、前記第1外周情報と前記第2外周情報とを比較し、前記第1外周情報と前記第2外周情報との差が所定以上の場合、前記第1外周情報と前記第2外周情報との差が所定以上となる要因が所定の条件である場合は自動運転を許可し、前記第1外周情報と前記第2外周情報との差が所定以上となる要因が前記所定の条件でない場合は自動運転を禁止する、
ことを特徴とする作業車両。
【請求項4】
前記所定の条件は、前記圃場が、特殊形状の圃場であって、予め自動運転禁止から除外する圃場として登録されている第1の条件と、前記圃場が、圃場内で作業を行う作業機の形状または機能によって作業を回避する必要がある領域が圃場内に存在して、予め自動運転禁止から除外する圃場として登録されている第2の条件とを含む、
ことを特徴とする請求項3に記載の作業車両。
【請求項5】
前記制御装置は、作業者の手動運転による前記圃場内を周回する走行経路であって、前記圃場内に障害物が存在する場合には前記障害物を回避した走行経路から、前記第2外周情報を取得する、
ことを特徴とする請求項1~4のいずれか1つに記載の作業車両。
【請求項6】
前記制御装置は、作業者の手動運転による前記圃場内を周回する走行経路であって、前記圃場内に障害物が存在する場合には前記障害物を回避した走行経路から、前記第2外周情報を取得し、
前記所定の条件は、前記第2外周情報が前記障害物を回避した走行経路である第3の条件を含む、
ことを特徴とする請求項3または4に記載の作業車両。
【請求項7】
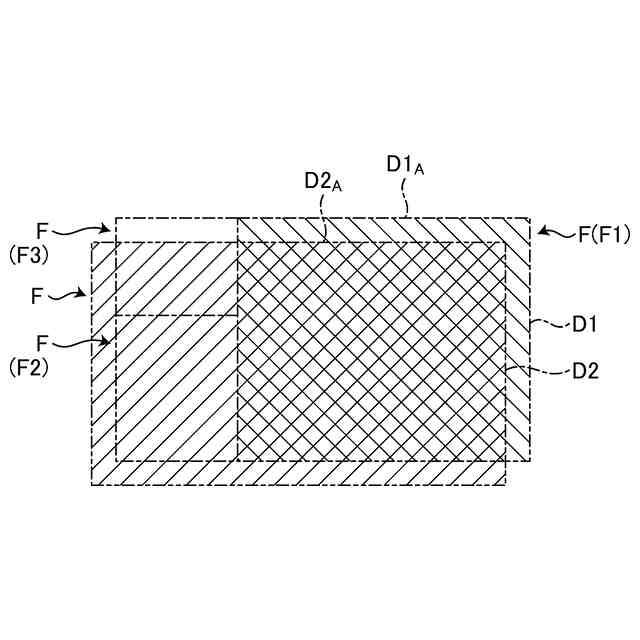
前記第1外周情報および前記第2外周情報は、それぞれ外周線で囲まれた領域の面積を含む、
ことを特徴とする請求項1~3のいずれか1つに記載の作業車両。
【請求項8】
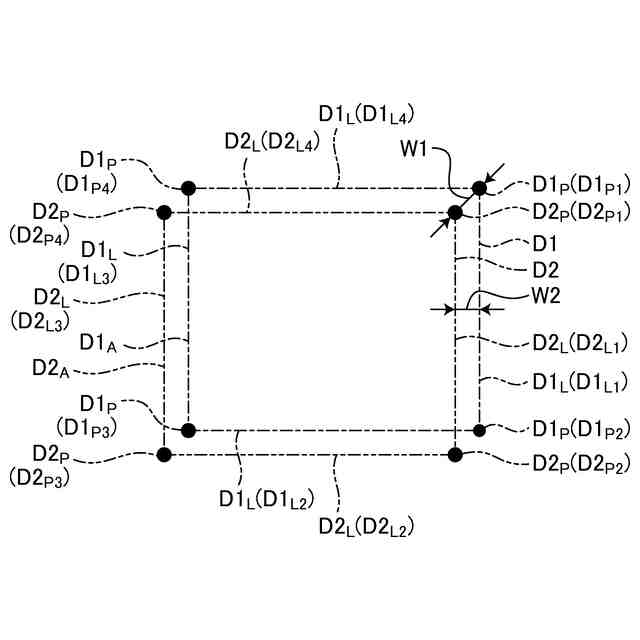
前記第1外周情報および前記第2外周情報は、それぞれ外周線で囲まれた領域の角部の位置を含む、
ことを特徴とする請求項1~3のいずれか1つに記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、測位装置によって測定された自己位置に基づいて圃場内の自動運転が可能な作業車両において、作業車両の自己位置の圃場の外周からの距離が所定以上の場合に自動運転開始が指示されると、算出された走行経路に沿って作業開始位置まで自動で移動する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-48494号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術は、測位装置によって測定された作業車両の自己位置に誤差が発生しているなどして、作業開始位置へ移動した後の走行経路がずれる点について考慮されていないため、ずれた走行経路に沿って自動運転を行うことで、たとえば、圃場内で未作業領域が発生してしまい、作業効率が低下するおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、作業効率の低下を抑制することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
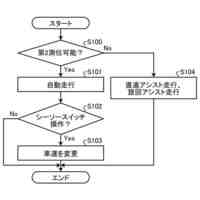
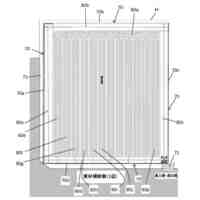
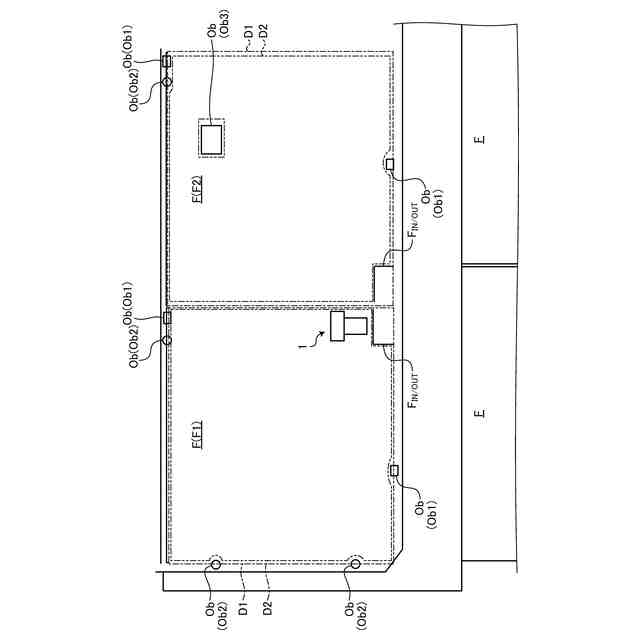
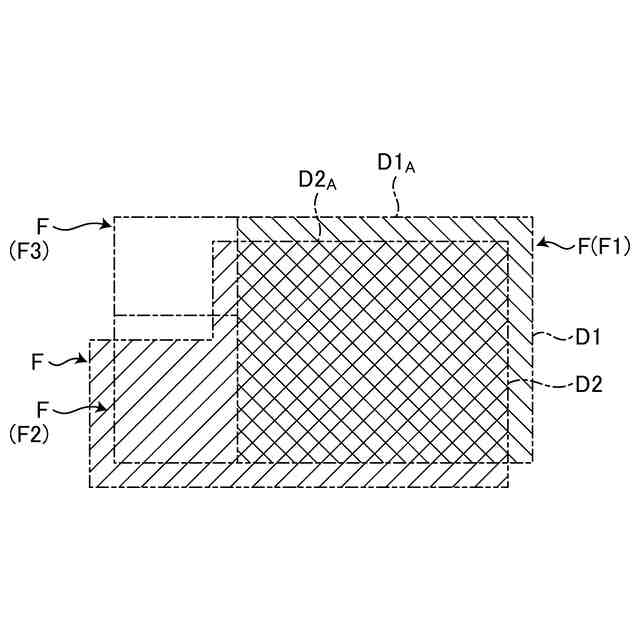
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(10)は、測位装置(20)によって測定された自己位置に基づいて圃場(F)内の自動運転が可能な作業車両(10)であって、前記測位装置(20)または前記圃場(F)の形状を含む圃場情報を有する圃場マップから前記圃場(F)の第1外周情報(D1)を取得する制御装置(50)を有し、前記制御装置(50)は、作業者の手動運転による前記圃場(F)内を周回する走行経路から前記圃場(F)の第2外周情報(D2)を取得し、前記第1外周情報(D1)と前記第2外周情報(D2)とを比較し、前記第1外周情報(D1)と前記第2外周情報(D2)との差が所定以上の場合には自動運転を禁止する。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、作業効率の低下を抑制することができる。
【図面の簡単な説明】
【0008】
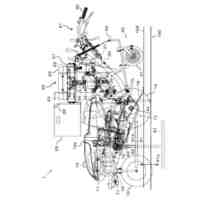
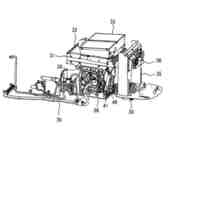
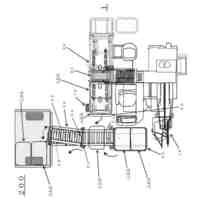
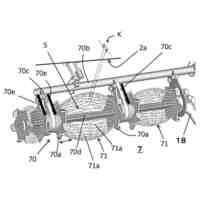
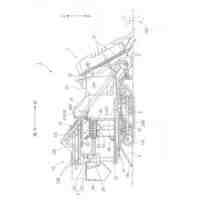
図1は、実施形態に係る作業車両の一例を示す概略側面図である。
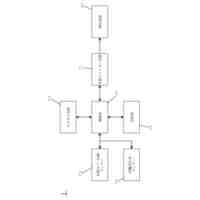
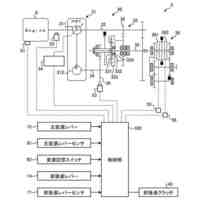
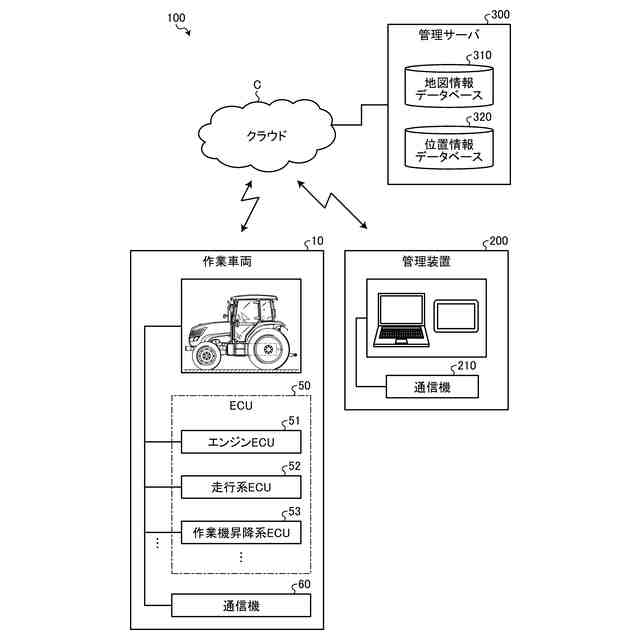
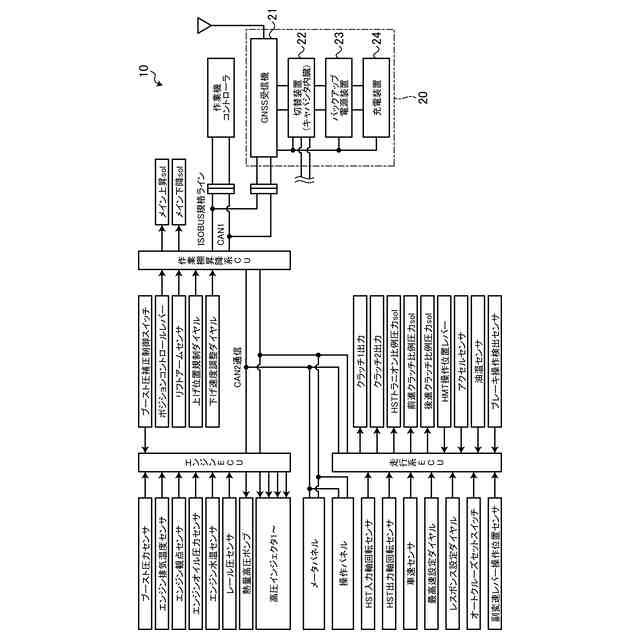
図2は、実施形態に係る作業車両を含む管理システムの一例を示すブロック図である。
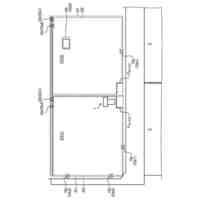
図3は、第1外周情報および第2外周情報の説明図である。
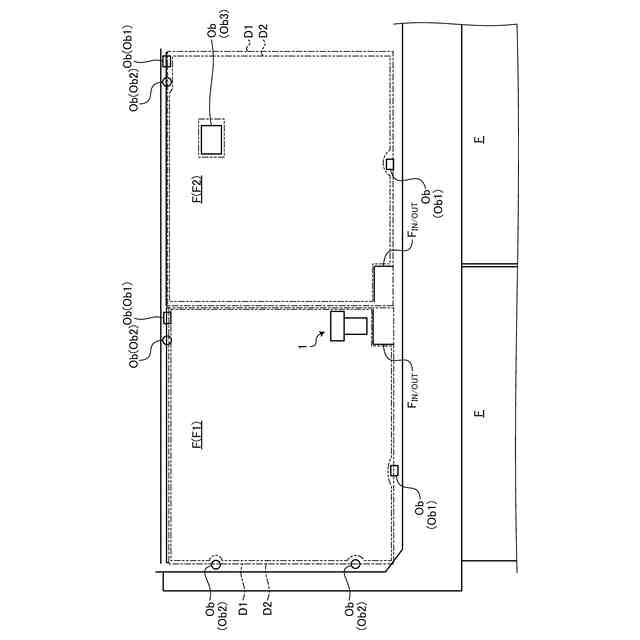
図4は、実施形態に係る作業車両の走行経路の説明図である。
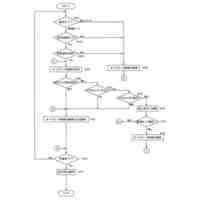
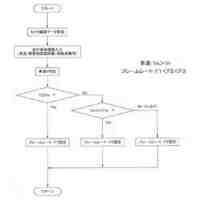
図5は、第1外周情報と第2外周情報との差の判断方法(その1)の説明図である。
図6は、第1外周情報と第2外周情報との差の判断方法(その2)の説明図である。
図7は、第1外周情報と第2外周情報との差の判断方法(その3)の説明図である。
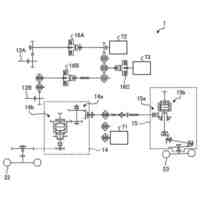
図8は、実施形態に係る作業車両の給電構成の一例を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両の概要>
図1を参照して実施形態に係る作業車両10の概要について説明する。図1は、実施形態に係る作業車両10の一例を示す概略側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
農作業機
8日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
苗移植機
16日前
井関農機株式会社
エンジン
16日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
野菜収穫機
8日前
井関農機株式会社
電動芝刈機
10日前
井関農機株式会社
屋外作業車
22日前
井関農機株式会社
圃場作業機
1日前
井関農機株式会社
圃場作業機
29日前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
根菜類収穫機
1か月前
井関農機株式会社
収穫作業車両
2日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
乗用型苗植機
29日前
井関農機株式会社
自動精米洗米炊飯機
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ