TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025168967
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024073882
出願日
2024-04-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
F16H
61/02 20060101AFI20251105BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】運転者の意図通りに機体を増減速させること。
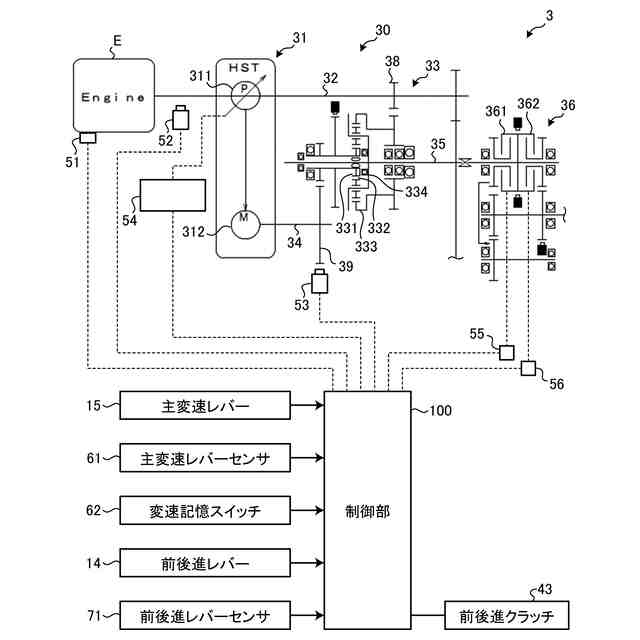
【解決手段】実施形態に係る作業車両は、機体を無段変速する主変速装置と、主変速装置を作動させる場合に、中立位置から増速側および減速側のいずれかへ傾倒操作される主変速レバーと、主変速レバーの操作位置を検出する主変速レバーセンサと、主変速レバーセンサによって検出された主変速レバーの操作位置に対応する変速指示値を主変速装置へ出力する制御部とを備える。主変速レバーは、傾倒操作された主変速レバーが中立位置へ戻るように付勢されている。制御部は、主変速レバーの操作位置に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能である。制御部は、主変速レバーの傾倒時間が所定の時間以上になると機体の無段変速を開始させる。
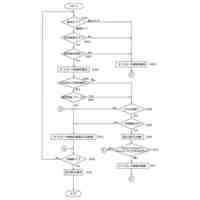
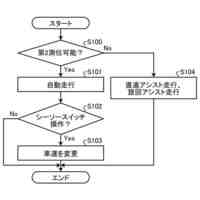
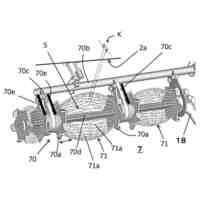
【選択図】図3
特許請求の範囲
【請求項1】
機体を無段変速する主変速装置と、
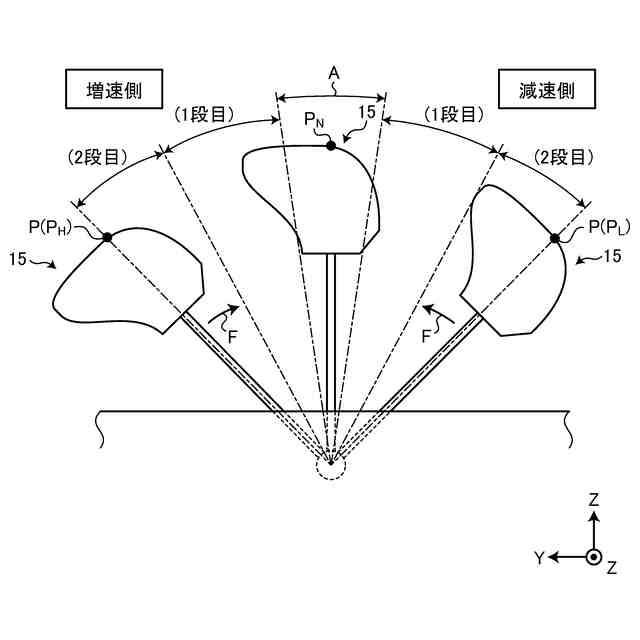
前記主変速装置を作動させる場合に、中立位置から前方の増速側および後方の減速側のいずれかへ傾倒操作される主変速レバーと、
前記主変速レバーの操作位置を検出する主変速レバーセンサと、
前記主変速レバーセンサによって検出された前記主変速レバーの操作位置に対応する変速指示値を前記主変速装置へ出力して機体を無段変速させる制御部と
を備え、
前記主変速レバーは、
前記主変速レバーが傾倒操作された後、傾倒操作された前記主変速レバーが中立位置へ戻るように付勢されており、
前記制御部は、
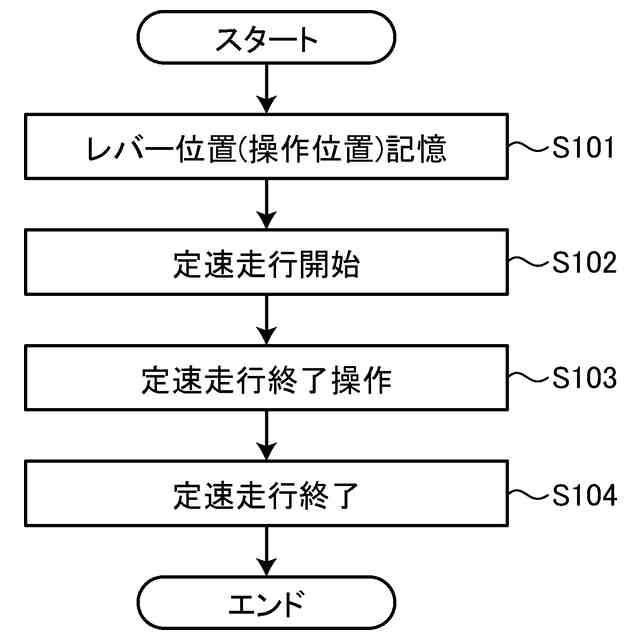
傾倒操作された前記主変速レバーの操作位置に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能であり、
傾倒操作された前記主変速レバーの傾倒時間が所定の時間以上になると機体の無段変速を開始させる、作業車両。
続きを表示(約 780 文字)
【請求項2】
前記制御部は、
機体の走行停止中に前記主変速レバーが傾倒操作された場合、傾倒操作された前記主変速レバーの傾倒時間が所定の第1時間以上であれば機体を発進させる、請求項1に記載の作業車両。
【請求項3】
前記制御部は、
機体の発進後には、予め設定された発進速度まで所定の変速速度で機体を増速させる、請求項2に記載の作業車両。
【請求項4】
前記制御部は、
機体の走行中に前記主変速レバーが傾倒操作された場合、傾倒操作された前記主変速レバーの傾倒時間が前記第1時間よりも長い所定の第2時間以上であれば該傾倒時間に応じて機体を無段変速させる、請求項3に記載の作業車両。
【請求項5】
前記制御部は、
機体の走行中に前記主変速レバーが傾倒操作された場合、傾倒操作された前記主変速レバーの傾倒時間が前記第1時間以上であり、かつ、前記第2時間未満であれば所定の走行速度まで機体を増速させる、請求項4に記載の作業車両。
【請求項6】
機体の前進、後進および中立を切り替える前後進装置と、
前記前後進装置を作動させる場合に、中立位置から前方の前進側および後方の後進側のいずれかへと傾倒操作される前後進レバーと、
前記前後進レバーの操作位置を検出する前後進レバーセンサと
を備え、
前記制御部は、
前記前後進レバーが後進側へ傾倒された状態で前記主変速レバーが前方へ傾倒された場合は機体を後進増速させ、前記前後進レバーが後進側へ傾倒された状態で前記主変速レバーが後方へ傾倒された場合は機体を後進減速させ、機体の走行停止中に前記主変速レバーが後方へ傾倒操作されても機体の走行停止を維持させる、請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、無段変速装置を備え、無段階に機体変速するために主変速レバーが操作された場合に、主変速レバーの操作速度および操作量に応じて機体変速時の加速(増速)度および減速度を制御する作業車両が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-298050号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、トラクタなどの農業用の作業車両では、作業しながら走行する場合に一定の速度(定速)で走行することが多いため、所定の速度を記憶し、記憶した速度で定速走行するように変速する、いわゆるメモリ変速を行うことが検討されている。
【0005】
たとえば、上記のような従来の作業車両においてメモリ変速を行う場合、メモリ変速時に実際の車速(定速走行中の車速)と主変速レバーの位置とが一致せず、これにより、運転者が混乱することが考えられる。
【0006】
このため、メモリ変速時の実際の車速と主変速レバーの位置との矛盾を防ぐために、運転者が前方へ主変速レバーを倒せば増速側に変速し、運転者が後方へ主変速レバーを倒せば減速側に変速し、運転者が主変速レバーから手を放すと所定の定速が保持された状態で主変速レバーを中立に戻す技術が検討されている。
【0007】
しかしながら、このような技術においても、たとえば、メモリ変速時に運転者が主変速レバーに意図せず触れた場合には不意に機体が増減速する可能性が考えられることから、運転者の誤操作によって機体を増減速させずに運転者の意図した操作で機体を増減速させる、すなわち、運転者の意図通りに機体を増減速させる点で改善の余地がある。
【0008】
本発明は、上記に鑑みてなされたものであって、運転者の意図通りに機体を増減速させることができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
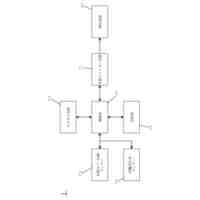
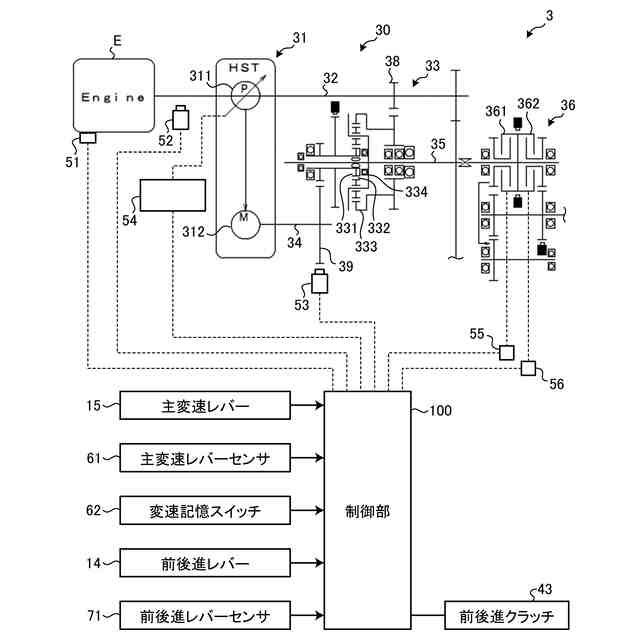
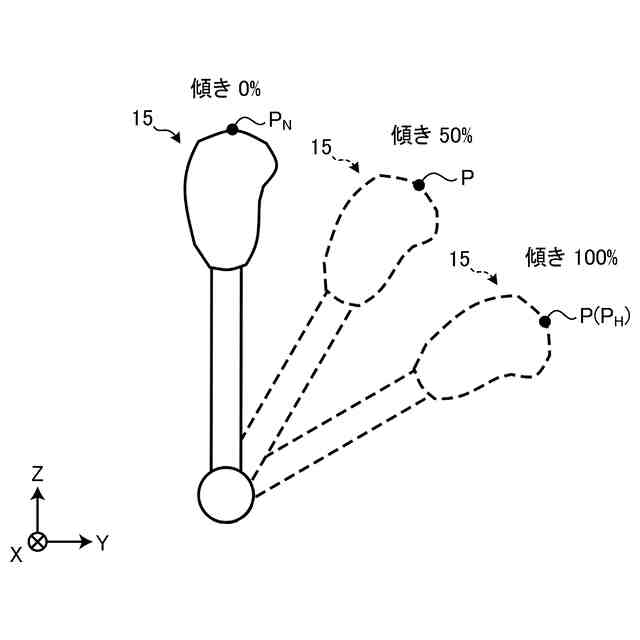
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(1)は、機体を無段変速する主変速装置(30)と、前記主変速装置(30)を作動させる場合に、中立位置(P
N
)から前方の増速側および後方の減速側のいずれかへ傾倒操作される主変速レバー(15)と、前記主変速レバー(15)の操作位置(P)を検出する主変速レバーセンサ(61)と、前記主変速レバーセンサ(61)によって検出された前記主変速レバー(15)の操作位置(P)に対応する変速指示値を前記主変速装置(30)へ出力して機体を無段変速させる制御部(100)とを備え、前記主変速レバー(15)は、前記主変速レバー(15)が傾倒操作された後、傾倒操作された前記主変速レバー(15)が中立位置(P
N
)へ戻るように付勢されており、前記制御部(100)は、傾倒操作された前記主変速レバー(15)の操作位置(P)に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能であり、傾倒操作された前記主変速レバー(15)の傾倒時間が所定の時間以上になると機体の無段変速を開始させる。
【発明の効果】
【0010】
実施形態に係る作業車両によれば、運転者の意図通りに機体を増減速させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
14日前
井関農機株式会社
農作業機
6日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
苗移植機
14日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
エンジン
14日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
乗用芝刈機
2か月前
井関農機株式会社
屋外作業車
20日前
井関農機株式会社
電動芝刈機
8日前
井関農機株式会社
圃場作業機
27日前
井関農機株式会社
野菜収穫機
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ