TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149372
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049977
出願日
2024-03-26
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20251001BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】畦際からのオフセット幅を設定して、外周を前進作業で自動走行制御する作業車両がある。畦際を前進作業する際のみのオフセット自動走行制御で、後進時のオフセット自動走行制御ではない。そこで、後進時にオフセット自動走行制御をして適切な作業が行なえる作業車両を提供する。
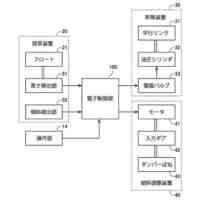
【解決手段】機体を走行させる走行部Aと操縦部Bと圃場から作物を収穫する収穫部Cを装備した作業車両において、制御装置が前進作業での作業開始地点Sと作業終了地点Qの位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備える。
【選択図】図6
特許請求の範囲
【請求項1】
機体を走行させる走行部(A)と操縦部(B)と圃場から作物を収穫する収穫部(C)を装備した作業車両において、制御装置(70)が前進作業での作業開始地点(S)と作業終了地点(Q)の位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備えたことを特徴とする作業車両。
続きを表示(約 280 文字)
【請求項2】
後進速度が所定の後進速度よりも速い場合、制御装置(70)がオフセットの所定距離を大きくすることを特徴とする請求項1記載の作業車両。
【請求項3】
自動後進制御の途中で操向操作具(13)を操作して方向変更すると自動後進制御が切れ、その後、操向操作具(13)が所定時間中立位置を保つと、制御装置(70)がその変更地点(R)の位置情報を衛星測位装置にて算出し、そのオフセット距離を算出して新たなS2-Rラインを設定し、以後、S2-Rラインに沿って機体を自動後進制御することを特徴とする請求項1または請求項2記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に植生する根菜類等の作物を収穫する作業車両に関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
畦際からのオフセット幅を設定して、外周を前進作業で自動走行制御する作業車両がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-179753号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
畦際を前進作業する際のみのオフセット自動走行制御で、後進時のオフセット自動走行制御ではない。
【0005】
本発明は、上記に鑑みてなされたものであって、後進時にオフセット自動走行制御をして適切な作業が行なえる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、機体を走行させる走行部Aと操縦部Bと圃場から作物を収穫する収穫部Cを装備した作業車両において、制御装置70が前進作業での作業開始地点Sと作業終了地点Qの位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備えた作業車両である。
【0007】
請求項1記載の発明によれば、オフセットしたS1-Qラインに沿って機体が自動後進するので、収穫作業時に機体側方に放出した排葉物や不良作物を踏みつけて後進してしまうことが回避でき、収穫作業時に機体側方に放出した排葉物や不良作物が後進の障害となることもなく、また、畝を踏み潰して次の収穫作業条の畝に土を寄せてしまって、次の収穫作業条での収穫作業時に収穫作業の障害となることを防止することができる。
【0008】
請求項2記載の発明は、後進速度が所定の後進速度よりも速い場合、制御装置70がオフセットの所定距離を大きくする請求項1記載の作業車両である。
【0009】
請求項2記載の発明によれば、請求項1に記載の発明の効果に加えて、後進速度が速いと圃場の起伏等で車体が傾き、精度が出ないため、オフセットした内側に入る場合もあるので、後進速度が所定の後進速度よりも速い場合にオフセットの所定距離を大きくして適切なオフセット自動後進が行なえるようにできる。
【0010】
請求項3記載の発明は、自動後進制御の途中で操向操作具13を操作して方向変更すると自動後進制御が切れ、その後、操向操作具13が所定時間中立位置を保つと、制御装置70がその変更地点Rの位置情報を衛星測位装置にて算出し、そのオフセット距離を算出して新たなS2-Rラインを設定し、以後、S2-Rラインに沿って機体を自動後進制御する請求項1または請求項2記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
農作業機
2日前
井関農機株式会社
野菜収穫機
2日前
個人
産卵床
2日前
個人
平板植栽
3日前
個人
蠅捕獲器
1か月前
個人
釣り用錘
20日前
個人
草刈り鋏
1か月前
個人
蜜蜂保護装置
1か月前
個人
果実袋
2日前
個人
噴霧器ノズル
18日前
個人
草刈機用回転刃
1か月前
個人
種子の製造方法
1か月前
個人
養殖器具
2日前
個人
移動体草刈り機
2日前
個人
昆虫捕集器
1か月前
個人
水田排水量調整器具
2日前
個人
可動リップ付きルアー
23日前
株式会社剛樹
釣り竿
16日前
個人
餌付き針の餌取り防止具
26日前
個人
ブルーカーボンシステム
23日前
株式会社ナベル
表示システム
26日前
個人
四足動物用装着具
1か月前
井関農機株式会社
圃場作業機
23日前
有限会社信英精密
括り罠
10日前
積水樹脂株式会社
シート止め具
2日前
井関農機株式会社
苗移植機
10日前
井関農機株式会社
作業車両
1か月前
みのる産業株式会社
除草機
26日前
みのる産業株式会社
除草機
26日前
松山株式会社
収穫機
23日前
井関農機株式会社
作業車両
1か月前
松山株式会社
収穫機
23日前
個人
粘着板で挟むネズミ捕り装置
2日前
個人
網口高さのベクトル底引き網
2日前
株式会社オーツボ
海苔箱船
1か月前
株式会社アテックス
芝草の刈取装置
9日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ