TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025157757
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2024059972
出願日
2024-04-03
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01C
11/00 20060101AFI20251008BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
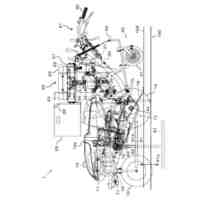
【課題】圃場における作物の収量を確保しつつ、従来技術に比べて旋回時の作業性を向上させること。
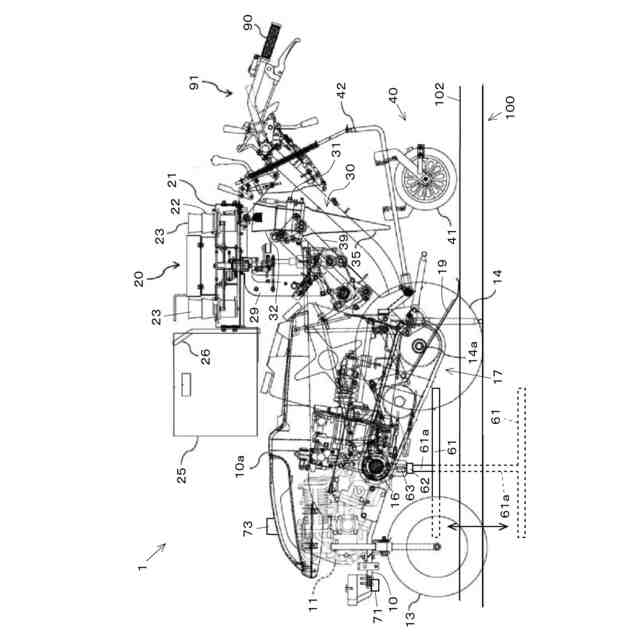
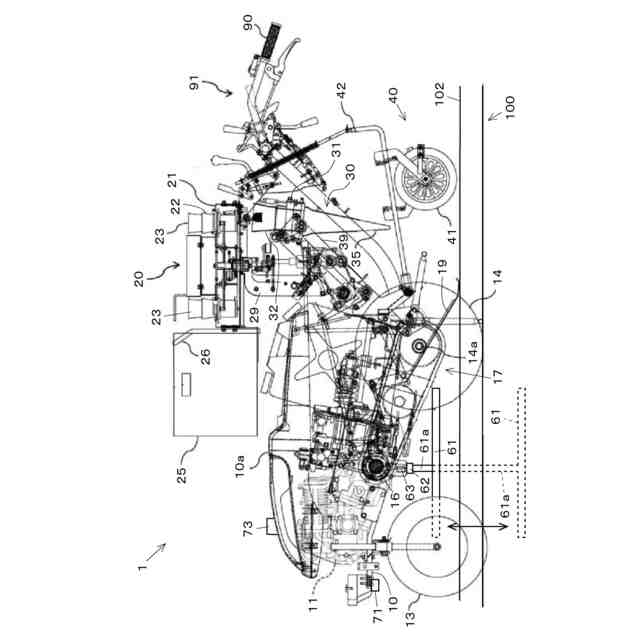
【解決手段】車両本体(10)に支持され、接地した状態で車両本体(10)を圃場面に対して旋回可能に支持する旋回部材(61)と、旋回部材(61)を圃場に接地または離間させる方向に移動させる移動部材(63)と、を備えることで、圃場における作物の収量を確保しつつ、従来技術に比べて旋回時の作業性を向上させることができる。
【選択図】図1
特許請求の範囲
【請求項1】
車両本体(10)と、
前記車両本体(10)に支持され、圃場での作業時に作動する作業機(20,30)と、
前記車両本体(10)に支持され、接地した状態で前記車両本体(10)を圃場面に対して旋回可能に支持する旋回部材(61)と、
前記旋回部材(61)を前記圃場に接地または離間させる方向に移動させる移動部材(63)と、
を備えたことを特徴とする作業車両(1)。
続きを表示(約 300 文字)
【請求項2】
圃場の畝(102)を検出する畝検出センサ(71)と、
前記旋回部材(61)に対する前記車両本体(10)の旋回角度を検出する旋回角度センサ(72)と、
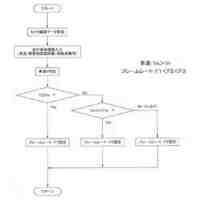
前記畝検出センサ(71)が畝(102)を非検出になってから予め定められた時間が経過した場合に、前記移動部材(63)で前記旋回部材(61)を接地させるとともに、前記旋回部材(61)が接地した後に前記旋回角度センサ(72)が検出する旋回角度が予め定められた角度に達した場合に前記移動部材(63)で前記旋回部材(61)を地面から離間させる制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両(1)。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
圃場への苗の移植や耕うん等の作業を行う作業車両において、車輪で走行しながら畝に苗を移植していき、複数の畝に対して往復しながら作業を行う苗移植機が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第3965000号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術のように、圃場での作業は、作業車両が直線状の畝や走行経路に対して旋回をして往復移動を行うことが一般的である。そして、圃場では作物の収量を増やすために、圃場の端ぎりぎりまで畝を形成し、作物の植付可能な範囲を広くする。したがって、旋回しやすくするために畝を形成しない範囲を十分に確保すると作物の収量が減る問題があり、圃場の端において旋回をするために畝を形成しない範囲は狭くなっている。
したがって、特許文献1に記載の作業車両では、旋回時に畝の端を崩したり、畝の端に接触せずに旋回するために狭い場所で何度も切り返しを行う必要があったり、前輪または後輪を作業者が持ち上げながら旋回するといった旋回時の負担が重くなったりする問題がある。すなわち、特許文献1に記載の作業車両では、旋回時の作業性が悪い問題がある。
【0005】
本発明は、圃場における作物の収量を確保しつつ、従来技術に比べて旋回時の作業性を向上させることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車両本体(10)と、前記車両本体(10)に支持され、圃場での作業時に作動する作業機(20,30)と、前記車両本体(10)に支持され、接地した状態で前記車両本体(10)を圃場面に対して旋回可能に支持する旋回部材(61)と、前記旋回部材(61)を前記圃場に接地または離間させる方向に移動させる移動部材(63)と、を備えたことを特徴とする作業車両(1)である。
【0007】
請求項2に記載の発明は、圃場の畝(102)を検出する畝検出センサ(71)と、前記旋回部材(61)に対する前記車両本体(10)の旋回角度を検出する旋回角度センサ(72)と、前記畝検出センサ(71)が畝(102)を非検出になってから予め定められた時間が経過した場合に、前記移動部材(63)で前記旋回部材(61)を接地させるとともに、前記旋回部材(61)が接地した後に前記旋回角度センサ(72)が検出する旋回角度が予め定められた角度に達した場合に前記移動部材(63)で前記旋回部材(61)を地面から離間させる制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両(1)である。
【発明の効果】
【0008】
請求項1記載の発明によれば、車両本体(10)に支持され、接地した状態で車両本体(10)を圃場面に対して旋回可能に支持する旋回部材(61)と、旋回部材(61)を圃場に接地または離間させる方向に移動させる移動部材(63)と、を備えることで、圃場における作物の収量を確保しつつ、従来技術に比べて旋回時の作業性を向上させることができる。
【0009】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、畝検出センサ(71)が畝(102)を非検出になってから予め定められた時間が経過した場合に、移動部材(63)で旋回部材(61)を接地させるとともに、旋回部材(61)が接地した後に旋回角度センサ(72)が検出する旋回角度が予め定められた角度に達した場合に移動部材(63)で前記旋回部材(61)を地面から離間させることで、旋回部材(61)の接地と離間を自動的に行うことができ、作業性を向上させることができる。
【図面の簡単な説明】
【0010】
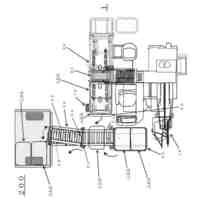
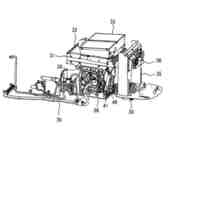
実施の形態に係る苗移植機を示す左側面図である。
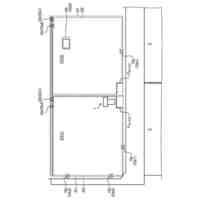
図1の苗移植機を示す上面図である。
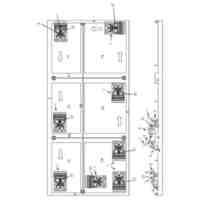
図1の苗移植機をその一部を省略して示す背面図である。
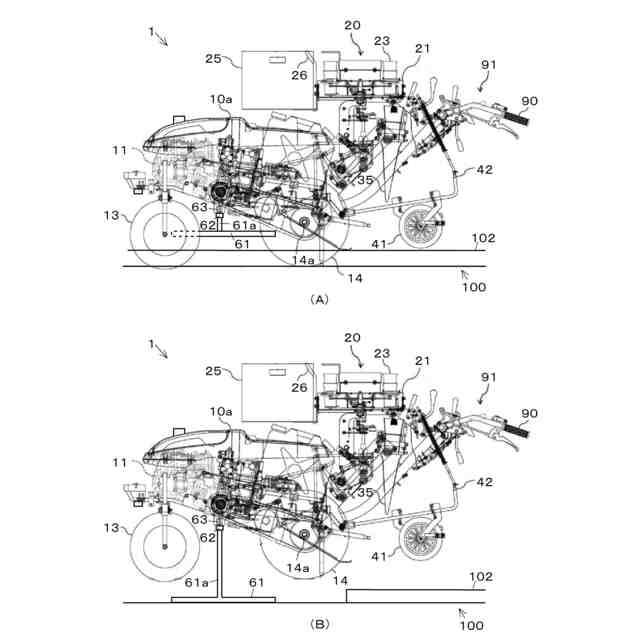
図4は実施の形態の旋回部材の昇降の説明図であり、図4(A)は離間位置に移動した状態の説明図、図4(B)は接地位置に移動した状態の説明図である。
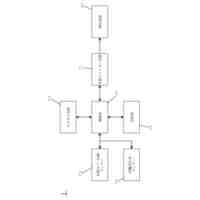
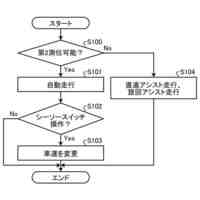
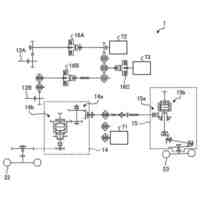
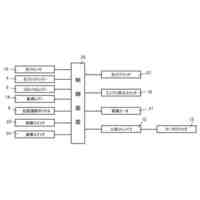
図5は実施の形態の制御部の機能ブロック図である。
図6は実施の形態の作用説明図であり、図6(A)は苗移植機の往路走行時の説明図、図6(B)は旋回時の説明図、図6(C)は復路走行時の説明図である。
図7は従来の旋回動作の説明図であり、図7(A)は畝の端に十分な旋回用の領域が確保された場合の説明図、図7(B)は旋回用の領域が狭い場合の説明図である。
図8は実施の形態の苗移植機において、作業が完了した畝から隣の畝に移行する際の説明図であり、図8(A)は180度旋回した状態で隣の畝に移行する場合の説明図、図8(B)は90度旋回した状態で隣の畝に移行する場合の説明図である。
図9は他の形態の苗移植機の説明図であり、図9(A)は模式図、図9(B)は旋回時の説明図である。
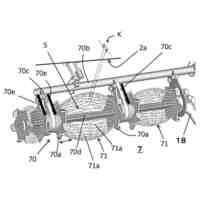
図10は実施の形態の苗植付装置の拡大図である。
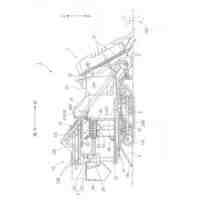
図11は他の形態2の苗移植機の説明図である。
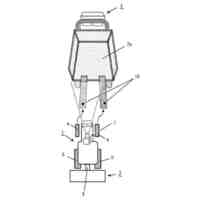
図12は蔓性の苗用の苗植付け具の要部説明図であり、図12(A)は実施の形態の他の形態2の説明図、図12(B)は従来の技術の説明図である。
図13は図12の変形例の説明図であり、図13(A)は変形例1の説明図、図13(B)は変形例2の説明図である。
図14は図11に示す苗移植機における鎮圧輪の作動部分の説明図であり、図14(A)はカムの形状の説明図、図14(B)は図14(A)のカムを使用した場合のアームの回転角のプロファイルのグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
エンジン
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
野菜収穫機
1日前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
圃場作業機
22日前
井関農機株式会社
屋外作業車
15日前
井関農機株式会社
電動芝刈機
3日前
井関農機株式会社
根菜類収穫機
1か月前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
歩行型耕運機
1か月前
井関農機株式会社
乗用型苗植機
22日前
井関農機株式会社
自動精米洗米炊飯機
22日前
井関農機株式会社
農産物の管理システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ