TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135847
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033858
出願日
2024-03-06
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250911BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両の異常に応じて安全性を確保しつつ作業性を向上させること。
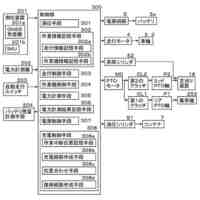
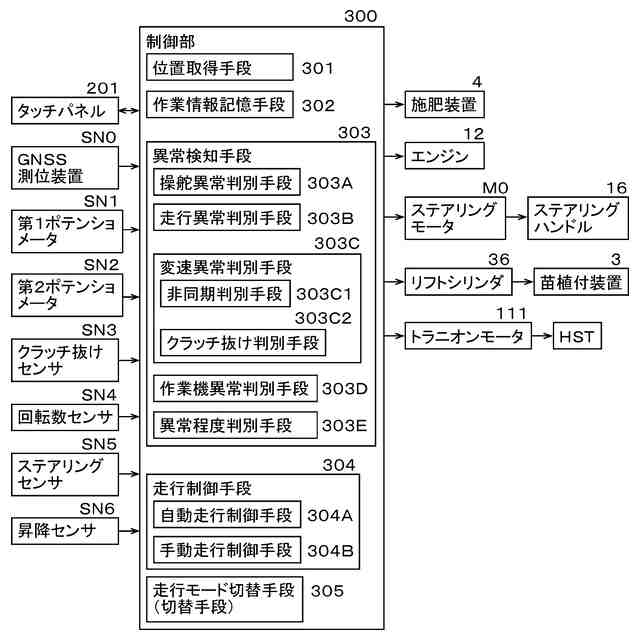
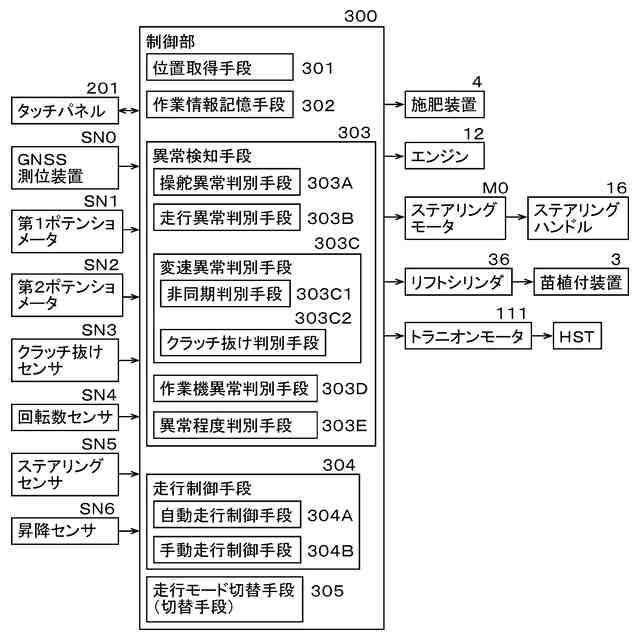
【解決手段】位置取得手段(301)で取得された現在位置の情報に基づいて走行車体(1)を自動走行させる自動走行モードと、作業者の運転操作に応じて走行させる手動走行モードと、を切り替える制御部(300)が、異常検知手段(303)で異常が検出されて走行車体(1)が停止される場合に、自動走行モードを維持することで、作業車両の異常に応じて安全性を確保しつつ作業性を向上させることができる。
【選択図】図5
特許請求の範囲
【請求項1】
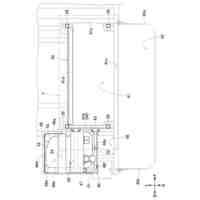
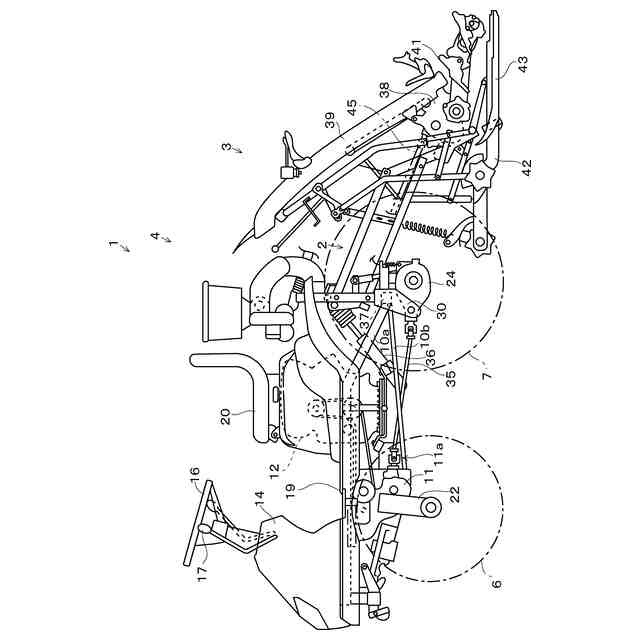
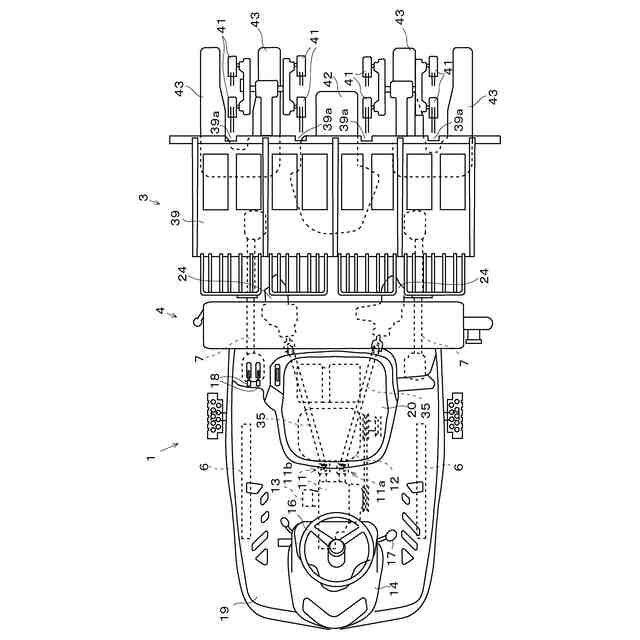
エンジン(12)と、前記エンジン(12)からの駆動が伝達されて走行する走行装置(6,7)を有する走行車体(1)と、
前記走行車体(1)に支持されて圃場に対して作業を行う作業機(3)と、
前記走行車体(1)の現在位置を取得する位置取得手段(301)と、前記位置取得手段(301)で取得された現在位置の情報に基づいて走行車体(1)を圃場において自動走行させる自動走行モードと、作業者の運転操作に応じて走行車体(1)を走行させる手動走行モードと、を切り替える切替手段(305)と、作業車両に関する異常を検知する異常検知手段(303)と、前記異常検知手段(303)で異常が検出された場合に、前記走行車体(1)を停止させる走行制御手段(304)と、を有し、前記異常検知手段(303)で異常が検出されて前記走行車体(1)が停止される場合に、前記自動走行モードを維持する制御部(300)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,600 文字)
【請求項2】
前記自動走行モードにおいて前記走行車体(1)の進行方向を操舵制御する操舵制御部材(16)と、
前記操舵制御部材(16)の異常を検出した場合には、前記エンジン(12)を停止させるとともに、手動走行モードに切り替える前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行装置(6,7)の異常が検出された場合には、前記エンジン(12)を停止させるとともに、手動走行モードに切り替える前記制御部(300)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
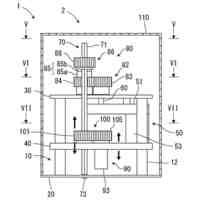
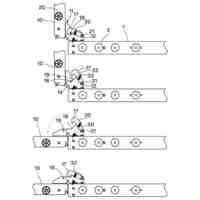
斜板の角度を変更することで変速を行う静油圧式無段変速機(HST)と、
前記斜板に連結されて、回転時に斜板の角度を変更させるトラニオン軸(101)と、
前記トラニオン軸(101)に連結されて、前記トラニオン軸(101)を回転させるトラニオンアーム(102)と、
前記トラニオンアーム(102)を移動させるトラニオンモータ(111)と、
前記トラニオンモータ(111)の回転位置を検出する第1のセンサ(SN1)と、
前記トラニオンアーム(102)の位置を検出する第2のセンサ(SN2)と、
前記第1のセンサ(SN1)の検出結果と前記第2のセンサ(SN2)の検出結果とに基づいて、前記トラニオンアーム(102)と前記トラニオンモータ(111)との動作が同期していないと判別された場合には、前記エンジン(12)を停止させるとともに、手動走行モードに切り替える前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項5】
前記トラニオンモータ(111)と前記トラニオンアーム(102)との間に配置され、伝動の入切を行うクラッチ(107)と、
前記第1のセンサ(SN1)の検知結果と前記第2のセンサ(SN2)の検知結果とに基づいて、前記クラッチ(107)による伝動のずれが発生したと判別された場合に、前記走行車体(1)の走行の制動を行う前記制御部(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項6】
前記第1のセンサ(SN1)の検知結果と前記第2のセンサ(SN2)の検知結果とに基づいて、前記クラッチ(107)による伝動のずれが予め定められた範囲内の場合には、前記第1のセンサ(SN1)の検出値が中立状態になるように前記トラニオンモータ(111)を作動させることで、前記走行車体(1)の走行の制動を行う前記制御部(300)、
を備えたことを特徴とする請求項5に記載の作業車両。
【請求項7】
前記第1のセンサ(SN1)の検出値が中立状態になるように前記トラニオンモータ(111)の作動を開始してから、予め定められた時間が経過しても、前記第1のセンサ(SN1)の検出値が中立状態に達しない場合には、前記エンジン(12)を停止させる前記制御部(300)、
を備えたことを特徴とする請求項6に記載の作業車両。
【請求項8】
前記トラニオンモータ(111)からの駆動が伝達される第1の伝達部(107b)と、前記トラニオンアーム(102)に連結され且つ前記第1の伝達部(107b)に対して接触・離間可能な第2の伝達部(107c)と、を有し、前記第1の伝達部(107b)と前記第2の伝達部(107c)とが接触した場合に前記トラニオンモータ(111)からの動力が前記トラニオンアーム(102)に伝達される前記クラッチ(107)と、
前記第1の伝達部(107b)に対して離間する方向への前記第2の伝達部(107c)の移動を検出する離間検出部材(SN3)と、
を備えたことを特徴とする請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、作業車両の現在位置に基づいて自動走行を行う自動走行モードを有する作業車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
田植機や苗移植機等の作業車両において、全地球測位衛星システム(GNSS:Global Navigation Satellite System)で取得された位置情報に基づいて、苗を植え付ける位置(目標位相)を算出して、植付ユニット(200)の実際の位相と目標位相から植付ユニット(200)を制御する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第6342344号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術において、GNSSの人工衛星との通信は、人工衛星の位置と周辺の建物や橋梁との位置関係や、周辺の建物からの信号の反射等、様々な要因で、位置情報が正確に取得できない(いわゆる、「ロスト」する)ことがある。また、GNSSの信号処理のエラーが発生することもある。特許文献1に記載の技術において、植付作業中にロストやエラーが発生すると、自動走行の経路から車両が外れたり、苗の植え付け位置が正確に算出されなくなり、植付位置(植付間隔)がバラバラになったり、植付作業自体ができなくなる問題がある。
【0005】
したがって、GNSSの信号がロストしたりすると、従来の技術では、安全のため、車両を停止させるとともに、自動走行モードを解除して、手動走行モードに強制的に切り替える処理が行われていた。
また、自動走行中に、走行装置や変速機、作業機の異常等が発生した場合も、安全のため、車両を停止させるとともに、自動走行モードを解除して、手動走行モードに強制的に切り替える処理が行われていた。
【0006】
しかしながら、緊急停止して手動走行モードに移行すると、安全確認のため、外部の端末やリモートコントローラからの指示を受け付けなくなり、作業者が車両の位置まで直接行って操作を行って再起動を行う必要があった。したがって、例えば、圃場の真ん中で車両が緊急停止すると、作業者が現地(車両の位置)まで行く必要があった。
走行装置の異常のような、自動走行だけでなく手動走行でも問題があるような重度な異常の場合は、作業者が車両まで行って確認することが、安全上重要である。一方で、GNSSの信号のロストのような一時的な軽度の異常の場合でも、再起動のために車両の位置まで作業者が行って再起動しないと自動走行を再開できない従来技術では、作業性、作業効率が悪いという問題があった。
【0007】
本発明は、作業車両の異常に応じて安全性を確保しつつ作業性を向上させることを技術的課題とする。
【課題を解決するための手段】
【0008】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、エンジン(12)と、前記エンジン(12)からの駆動が伝達されて走行する走行装置(6,7)を有する走行車体(1)と、前記走行車体(1)に支持されて圃場に対して作業を行う作業機(3)と、前記走行車体(1)の現在位置を取得する位置取得手段(301)と、前記位置取得手段(301)で取得された現在位置の情報に基づいて走行車体(1)を圃場において自動走行させる自動走行モードと、作業者の運転操作に応じて走行車体(1)を走行させる手動走行モードと、を切り替える切替手段(305)と、作業車両に関する異常を検知する異常検知手段(303)と、前記異常検知手段(303)で異常が検出された場合に、前記走行車体(1)を停止させる走行制御手段(304)と、を有し、前記異常検知手段(303)で異常が検出されて前記走行車体(1)が停止される場合に、前記自動走行モードを維持する制御部(300)と、を備えたことを特徴とする作業車両である。
【0009】
請求項2に記載の発明は、前記自動走行モードにおいて前記走行車体(1)の進行方向を操舵制御する操舵制御部材(16)と、前記操舵制御部材(16)の異常を検出した場合には、前記エンジン(12)を停止させるとともに、手動走行モードに切り替える前記制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項3に記載の発明は、前記走行装置(6,7)の異常が検出された場合には、前記エンジン(12)を停止させるとともに、手動走行モードに切り替える前記制御部(300)を備えたことを特徴とする請求項1に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
虫捕り器
16日前
個人
刈込鋏保持具
12日前
個人
後付巻降ろし器
16日前
株式会社丹勝
緑化工法
13日前
個人
イカ釣り用ヤエン
16日前
株式会社シマノ
釣竿
16日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
16日前
大栄工業株式会社
捕獲器
6日前
井関農機株式会社
作業車両
12日前
松山株式会社
農作業機
12日前
トヨタ自動車株式会社
育苗装置
13日前
スガノ農機株式会社
圃場作業装置
13日前
みのる産業株式会社
茎葉処理装置
今日
井関農機株式会社
コンバイン
13日前
グローブライド株式会社
釣竿
6日前
株式会社デンソー
農業用装置
8日前
株式会社小川農具製作所
穴明け装置
7日前
グローブライド株式会社
釣竿
7日前
グローブライド株式会社
釣用のルアー
8日前
グローブライド株式会社
魚釣用リール
5日前
株式会社クボタ
コンバイン
7日前
個人
装飾品及び装飾品の製造方法
12日前
日東製網株式会社
養殖用網
16日前
株式会社笑農和
制御装置および送水装置
12日前
株式会社クボタ
コンバイン
7日前
大和ハウス工業株式会社
栽培装置
16日前
株式会社ユシロ
光徐放性組成物、及び物品
7日前
株式会社クボタ
コンバイン
7日前
花王株式会社
硬質表面用拭浄シート
1日前
個人
塩ビパイプでつくる両側入口のネズミ捕獲器
12日前
株式会社スズテック
播種装置の移送台
5日前
株式会社下瀬微生物研究所
畜舎換気システム
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ