TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150406
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051263
出願日
2024-03-27
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01D
45/26 20060101AFI20251002BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
収穫作業機を利用して結球野菜を収穫する場合、根切りのみ行い圃場に結球野菜を置いたままにして、後に専用作業車両で回収する場合があるが、結球野菜は大きく、重く、これに適合した収穫回収機にすると大きさが大きく、畝立てした圃場では小回りができないという課題があった。
【解決手段】
結球野菜を確実に掴むために、専用の吸着ハンドを設け、コンベアを利用した載置台の構成をとることで、塵埃や土塊に対応しながらも、小回りができる小型の構成をとる。
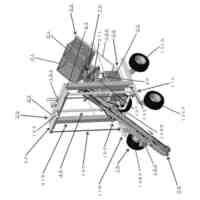
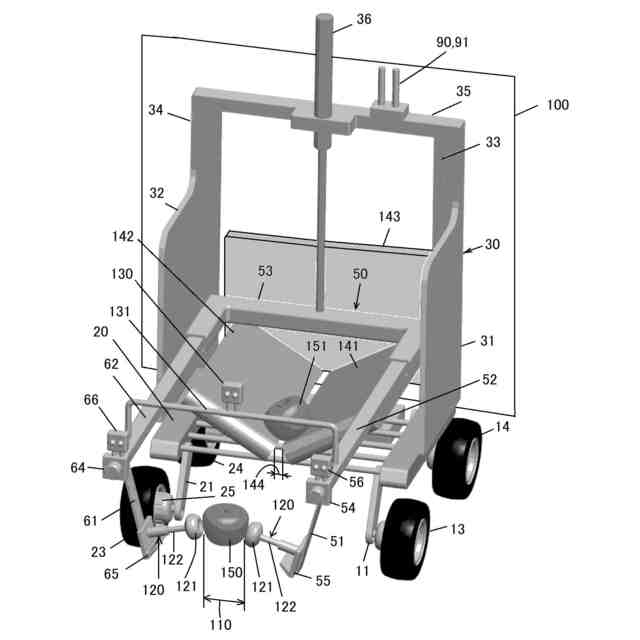
【選択図】図1
特許請求の範囲
【請求項1】
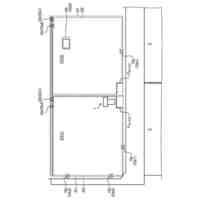
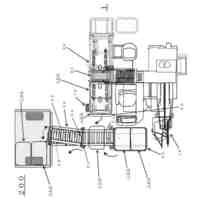
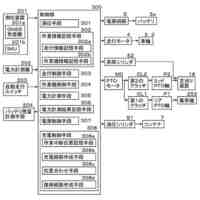
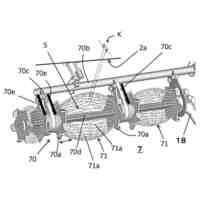
車両の前後方向面(100)に向かい、載置台(141)と載置台(142)をV字型に配置し、その間に載置台隙間(144)を開け、
載置台(141)と載置台(142)は、ベルトコンベア式で駆動搬送し、
載置台(141)と載置台(142)の後方に仕切り板(143)を設置し、載置台(141)と載置台(142)の上方に、ロボットアーム(50)を配置し、
ロボットアーム(50)の挟持位置(110)が、車両の前後方向面(100)に向いて、載置台隙間(144)の上方で直線上に配置された構成である、作業車両。
続きを表示(約 250 文字)
【請求項2】
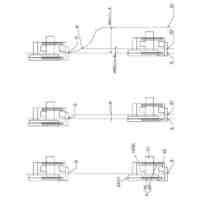
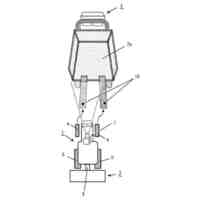
車両の前後方向面(100)に向かい、ロボットアーム(50)の挟持位置(110)に、吸着ハンド(120)を対称に配置し、
ロボットアーム(50)の挟持位置(110)が、撮像装置(130)の下方位置に配置され、
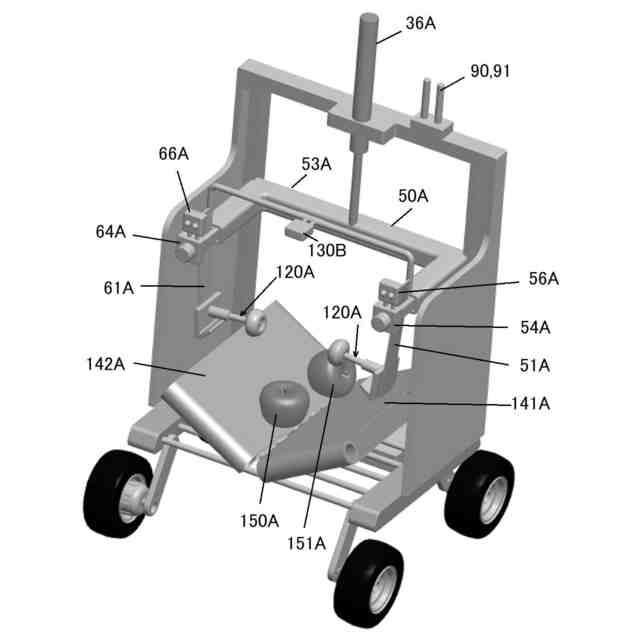
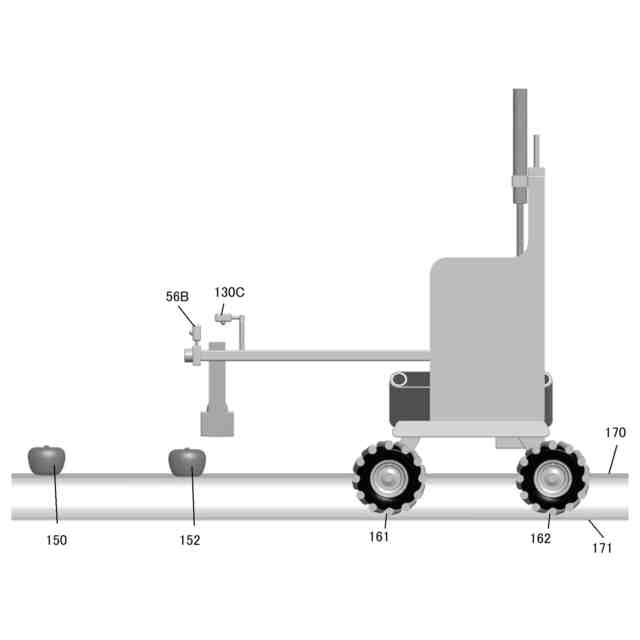
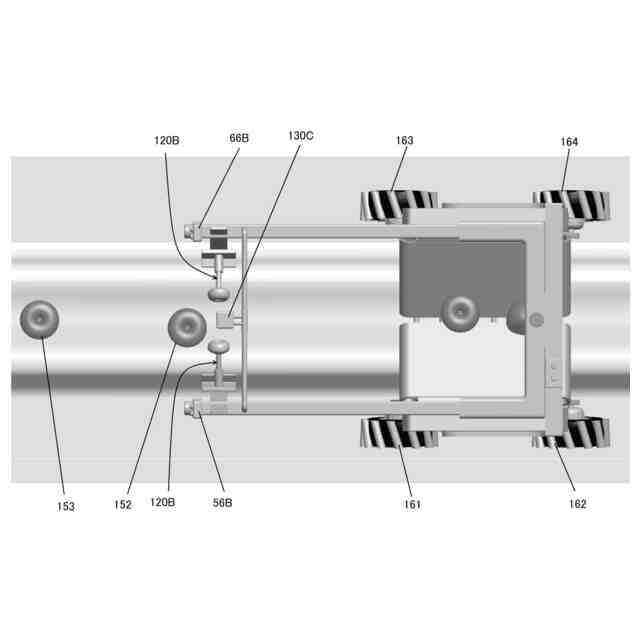
撮像装置(130)は、車両の左右中心位置から前方を撮像する撮像装置(130)の位置と、車両の左右中心位置から下方を撮像する撮像装置(130A)の二方向に撮像方向を切り替え、ロボットアーム(50)の移動方向に連動することを特徴とした、請求項1の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場において結球野菜を収穫する自動走行、自動積載のできる無人の作業車両に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
圃場から結球野菜を取り出し収容する場合、収容する作物がころがりやすく、また重量もあるため一度に多量に運べない問題がある。結球作物を無人で回収する作業車両が必要となっている。
(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開平6-113648号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、結球野菜を収穫する収穫ハンドを有し、収穫した野菜を搬送するコンベアを配備し、後方の収納庫に保管する構成がある。従来の収穫ハンドの形状は明確に記載が無く、収穫ハンドと搬送コンベアの引継ぎ構成や搬送の仕方が不明である。またロボット構成であるが、野菜を検出する検知装置と収穫ハンドの動き等も不明である。
【0005】
本発明は、撮像装置を利用して、結球野菜を確実に掴み(キャッチ)、搬送装置で後方に搬送しながら、塵埃や土塊を落し、搬送系を利用して一時保管する構成で、小型回収機の構成に特化することを課題とする。
【課題を解決するための手段】
【0006】
第一の発明は、次の技術手段により解決される。
【0007】
車両の前後方向面100に向かい、載置台141と載置台142をV字型に配置し、その間に載置台隙間144を開け、載置台141と載置台142は、ベルトコンベア式で駆動搬送し、載置台141と載置台142の後方に仕切り板143を設置し、載置台141と載置台142の上方に、ロボットアーム50を配置し、ロボットアーム50の挟持位置110が、車両の前後方向面100に向いて、載置台隙間144の上方で直線上に配置された構成である。
【0008】
第二の発明は、次の技術手段により解決される。
【0009】
車両の前後方向面100に向かい、ロボットアーム50の挟持位置110に、吸着ハンド120を対称に配置し、ロボットアーム50の挟持位置110が、撮像装置(130)の下方位置に配置され、撮像装置130は、車両の左右中心位置から前方を撮像する撮像装置130の位置と、車両の左右中心位置から下方を撮像する撮像装置130Aの二方向に撮像方向を切り替え、ロボットアーム50の移動方向に連動する。
【発明の効果】
【0010】
第一の発明より、結球野菜に付着した塵埃や土塊を即時に機外に排出し、野菜をきれいに保つことができる。また結球野菜を一時保管する場所を小さくすることで、小型の作業車両となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
エンジン
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
水田作業機
24日前
井関農機株式会社
屋外作業車
7日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
圃場作業機
14日前
井関農機株式会社
歩行型耕運機
1か月前
井関農機株式会社
乗用型苗植機
14日前
井関農機株式会社
根菜類収穫機
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ