TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171014
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075959
出願日
2024-05-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20251113BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】イレギュラー対応において自動対応と手動操作とを切替可能にすることで操作性を向上できる作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、4WDオートモードにおいて制御装置は、旋回時に走行車体の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させ、走行車体の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させている際に走行車体の車輪の空転を検知した場合、デファレンシャル機構をロックするデフロック機構を作動させ、走行車体の車輪の空転を検知した後に更に強力な推進力を発生させる場合、四輪駆動を作動させ、通常モードにおいて制御装置は、旋回時に走行車体の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させる。
【選択図】図3
特許請求の範囲
【請求項1】
作業者が乗車する走行車体と、
前記走行車体を自動走行させる制御装置と、を備える作業車両であって、
前記走行車体は、
前記走行車体のモードを切り替える操作具と、
旋回時に前記走行車体の前輪の左右それぞれを異なる回転数で回転させるデファレンシャル機構と、を有し、
前記走行車体のモードには、4WDオートモードと通常モードとが含まれ、
前記4WDオートモードにおいて前記制御装置は、
旋回時に前記走行車体の旋回内側後輪の駆動を切り、前記デファレンシャル機構を作動させ、
前記走行車体の旋回内側後輪の駆動を切り、前記デファレンシャル機構を作動させている際に前記走行車体の車輪の空転を検知した場合、前記デファレンシャル機構をロックするデフロック機構を作動させ、
前記走行車体の車輪の空転を検知した後に更に強力な推進力を発生させる場合、四輪駆動を作動させ、
前記通常モードにおいて前記制御装置は、
旋回時に前記走行車体の旋回内側後輪の駆動を切り、前記デファレンシャル機構を作動させる作業車両。
続きを表示(約 1,500 文字)
【請求項2】
前記走行車体のモードには、4WDロックモードが含まれ、
前記4WDロックモードにおいて前記制御装置は、
旋回時に常時デフロック機構を作動させるとともに、常時四輪駆動を作動させる請求項1に記載の作業車両。
【請求項3】
前記走行車体の位置を取得する位置取得装置を備え、
前記4WDオートモードにおいて、
前記走行車体の車輪の空転の検知は、前記走行車体の左右の車輪の回転差、または前記位置取得装置により計測される前記走行車体の車速に基づいて行われ、
前記制御装置は、前記走行車体の車輪の空転により、前記デフロック機構または四輪駆動を作動させる際に、前記走行車体の目標車速を一定以下に減速させる請求項1に記載の作業車両。
【請求項4】
前記制御装置は、前記デフロック機構または四輪駆動を作動させた後に、前記走行車体の目標車速を維持する、または、前記走行車体の車輪の空転を検知する前の車速となるように前記走行車体の目標車速を増速させる請求項3に記載の作業車両。
【請求項5】
前記制御装置は、
前記位置取得装置により計測される前記走行車体の車速に基づいてスリップを判断し、
スリップが解消されている場合、前記走行車体の目標車速を徐々に増速させ、スリップが解消されていない場合、前記走行車体の目標車速を維持または減速させてエンジン回転数を上げる請求項4に記載の作業車両。
【請求項6】
前記走行車体の位置を取得する位置取得装置を備え、
前記4WDロックモードにおいて前記制御装置は、
前記位置取得装置により計測される前記走行車体の車速に基づいてスリップを判断し、
スリップが解消されている場合、前記走行車体の目標車速を徐々に増速させ、スリップが解消されていない場合、前記走行車体の目標車速を維持または減速させてエンジン回転数を上げる請求項2に記載の作業車両。
【請求項7】
前記制御装置は、
前記エンジン回転数を上げた状態をスリップが解消されても継続させ、
旋回が完全に完了し、旋回後の作業開始位置に前記走行車体が到達した際に、前記エンジン回転数を上げた状態を終了する請求項6に記載の作業車両。
【請求項8】
前記走行車体は、ステアリングとHSTレバーとアクセルペダルとを備え、
前記制御装置は、
前記ステアリングまたは前記HSTレバーが操作された場合、前記走行車体の目標車速および前記エンジン回転数の制御に対して、前記ステアリングまたは前記HSTレバーの操作に基づく制御を優先させて、
前記アクセルペダルが操作された場合、前記アクセルペダルの操作に基づく制御に対して、前記走行車体の目標車速および前記エンジン回転数の制御を優先する請求項5から7のいずれか一つに記載の作業車両。
【請求項9】
前記走行車体は、ステアリングとHSTレバーとアクセルペダルとを備え、
前記制御装置は、
前記ステアリング、前記HSTレバーおよび前記アクセルペダルのいずれかが操作されても、前記4WDオートモードまたは前記4WDロックモードであるとともに、前記デフロック機構または四輪駆動が作動している場合、前記デフロック機構または四輪駆動の作動を維持し、
前記デフロック機構または四輪駆動の作動を止める場合は、前記操作具による前記通常モードへの切り替えが必要である請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、有人監視型のロボット苗移植機(作業車両)において、作業者が作業車両に乗車しないため、スタックによる作業が中断されることを防止すべく、ある程度スリップするとオートデフロック機構が作動し、オートデフロック機構が作動してもスリップが解消されないと強制的に四輪駆動することで走破性を強化していた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-136761号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業者が乗車する作業車両(たとえば、乗車型のロボット苗移植機)においても、主として作業車両が自動走行で作業を行い、スリップ等のイレギュラー対応も自動で行うことができる。しかしながら、作業車両に作業者が乗車しているため、作業者が手動でイレギュラー対応を行うことを望む場合がある。つまり、上記のオートデフロック機構や四輪駆動を全て自動で作動させた方がよい場合と、作業者が手動で操作した方がよい場合がある。したがって、イレギュラー対応において自動対応と手動操作とを切替可能にすることで操作性を向上できる作業車両が求められていた。
【0005】
本発明は、上記に鑑みてなされたものであって、イレギュラー対応において自動対応と手動操作とを切替可能にすることで操作性を向上できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、作業者が乗車する走行車体(2)と、走行車体(2)を自動走行させる制御装置(100)と、を備える作業車両(1)であって、走行車体(2)は、走行車体(2)のモードを切り替える操作具(45)と、旋回時に走行車体(2)の前輪(10)の左右それぞれを異なる回転数で回転させるデファレンシャル機構と、を有し、走行車体(2)のモードには、4WDオートモードと通常モードとが含まれ、4WDオートモードにおいて制御装置(100)は、旋回時に走行車体(2)の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させ、走行車体(2)の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させている際に走行車体(2)の車輪(10、11)の空転を検知した場合、デファレンシャル機構をロックするデフロック機構(97)を作動させ、走行車体(2)の車輪(10、11)の空転を検知した後に更に強力な推進力を発生させる場合、四輪駆動を作動させ、通常モードにおいて制御装置(100)は、旋回時に走行車体(2)の旋回内側後輪の駆動を切り、デファレンシャル機構を作動させる。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、イレギュラー対応において自動対応と手動操作とを切替可能にすることで操作性を向上できる。
【図面の簡単な説明】
【0008】
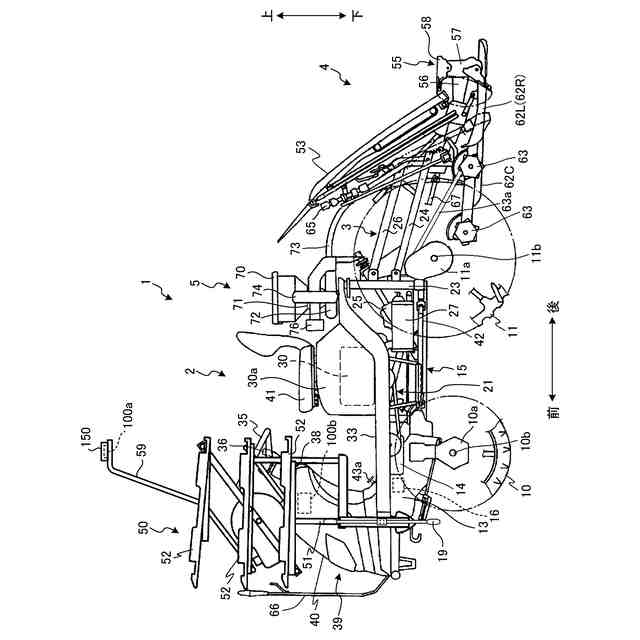
図1は、作業車両を示す側面図である。
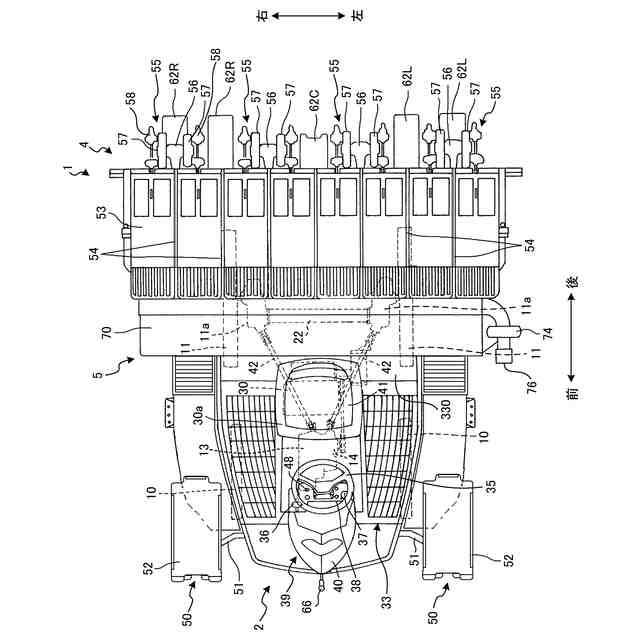
図2は、作業車両を示す平面図である。
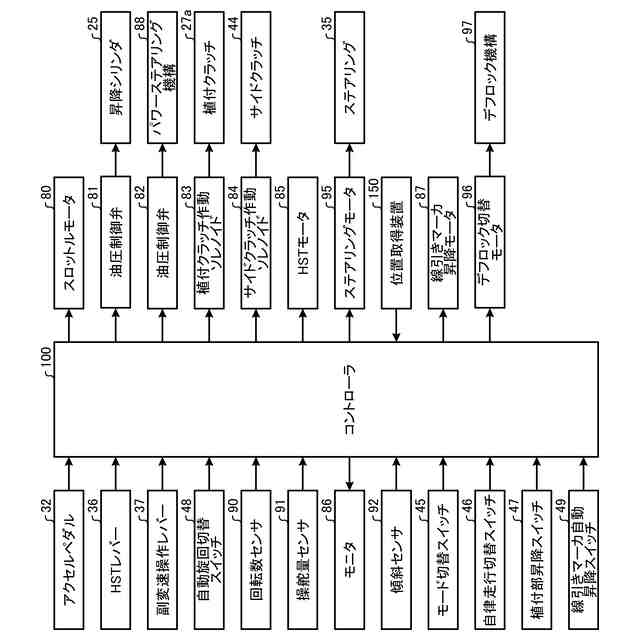
図3は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
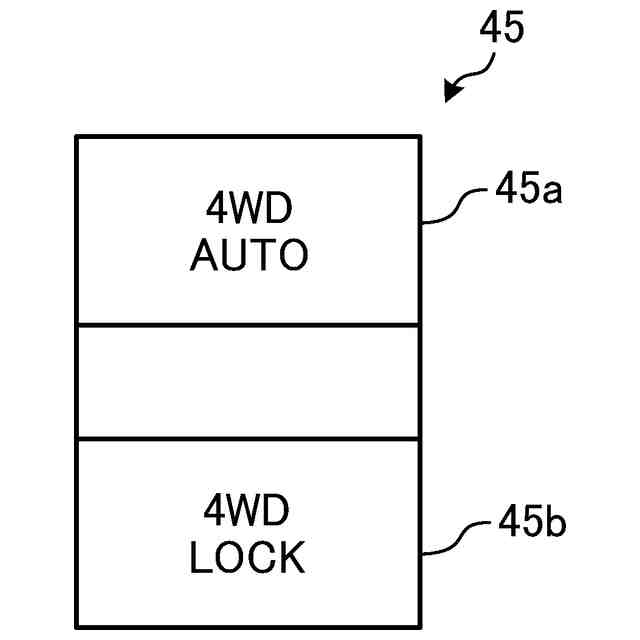
図4は、モード切替スイッチを示す図である。
図5は、苗移植機の圃場における自律走行の説明図である。
図6は、モニタの表示を示す図である。
【発明を実施するための形態】
【0009】
(作業車両の概要)
まず、図1および図2を参照して第1実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からステアリング35に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ