TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153631
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056198
出願日
2024-03-29
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
,
個人
主分類
B60T
7/02 20060101AFI20251002BHJP(車両一般)
要約
【課題】従来、走行時には主変速レバーを操作して無段変速装置に出力させる必要があり、微速で走行させる際には微細な操作が要求されるので、意図した速度に調節することが難しいという問題がある。
【解決手段】圃場を走行する走行装置2と、操縦部6と、対地作業を行う作業装置4と、走行装置2への伝動を減衰、停止させる走行ブレーキ11とを備える作業車両において、機体を微速前進させる微速前進コントローラ12を設け、微速前進コントローラ12は操縦部6から離れた位置に配置し、走行ブレーキ11をロック状態と非ロック状態に切り替える切替アクチュエータ13を設け、走行ブレーキ11がロック状態であるときに微速前進コントローラ12の操作が受付可能になると共に、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替えることで、機体の微速前進が行われる構成としたことを特徴とする作業車両。
【選択図】 図1
特許請求の範囲
【請求項1】
圃場を走行する走行装置(2)と、操縦部(6)と、対地作業を行う作業装置(4)と、走行装置(2)への伝動を減衰、停止させる走行ブレーキ(11)とを備える作業車両において、機体を微速前進させる微速前進コントローラ(12)を設け、微速前進コントローラ(12)は操縦部(6)から離れた位置に配置し、走行ブレーキ(11)をロック状態と非ロック状態に切り替える切替アクチュエータ(13)を設け、走行ブレーキ(11)がロック状態であるときに微速前進コントローラ(12)の操作が受付可能になると共に、切替アクチュエータ(13)が作動して走行ブレーキ(11)を非ロック状態に切り替えることで、機体の微速前進が行われる構成としたことを特徴とする作業車両。
続きを表示(約 1,400 文字)
【請求項2】
機体の前後進出力を操作する主変速レバー(14)を操縦部(6)に設け、主変速レバー(14)の操作位置を検出するレバーセンサ(15)を所定位置に設け、機体の移動を検出する移動センサ(16)を所定位置に設け、切替アクチュエータ(13)は、レバーセンサ(15)が主変速レバー(14)の中立位置を検出し、且つ移動センサ(16)が機体の移動を検出していない状態であるときに、ブレーキペダル(17)が所定時間連続して踏み込まれると走行ブレーキ(11)をロック状態に切り替える構成とし、微速前進コントローラ(12)は機体前側の作業装置(4)に設け、微速前進コントローラ(12)のハーネス(18)を引き出すことで機体から離れた状態で微速前進コントローラ(12)の操作が可能な構成としたことを特徴とする請求項1に記載の作業車両。
【請求項3】
微速前進コントローラ(12)は、作業装置(4)の取付位置からハーネス(18)を引き出さないと操作を受け付けない構成とし、微速前進コントローラ(12)は、操作しているときに微速前進させ、操作しないと微速前進が停止する構成としたことを特徴とする請求項2に記載の作業車両。
【請求項4】
作業者の搭乗を検出可能な作業座席25を操縦部(6)に設け、回転数を検出可能なエンジン(26)を搭載し、エンジン(26)の駆動力を前後進及び走行速度として伝動する無段変速装置(27)を設け、無段変速装置(27)と走行装置(2)との伝動経路を切り替える副変速装置(28)を所定位置に設け、作業装置(4)の上下位置を検出する作業高さセンサ(29)を所定位置に設け、機体の車高を検出する車高センサ(30)を所定位置に設け、微速前進コントローラ(12)の操作は、主変速レバー(14)の操作位置が「中立」位置で、副変速装置(28)が「走行」位置で、作業座席25への着座状態が「離席」であること、走行ブレーキ(11)が「ロック」であること、作業高さセンサ(29)が「最高」を検出し、車高センサ(30)が「最低」を検出し、エンジン(26)の回転数が「アイドリング」であるときに受付可能になる構成としたことを特徴とする請求項2または3に記載の作業車両。
【請求項5】
機体が微速前進の開始前、作動中、及び微速前進の条件が不成立であるときに作動する報知装置(35)を設け、微速前進の開始時に、エンジン(26)の回転数を「アイドリング」から「走行最低出力」に増加させ、無段変速装置(27)の出力を、エンジン(26)の回転数の上昇に比例して中立位置の回転から設定値まで増大させる構成とし、エンジン(26)の回転数及び無段変速装置(27)の出力が微速前進に適した状態になると、切替アクチュエータ(13)が作動して走行ブレーキ(11)を非ロック状態に切り替える構成としたことを特徴とする請求項4に記載の作業車両。
【請求項6】
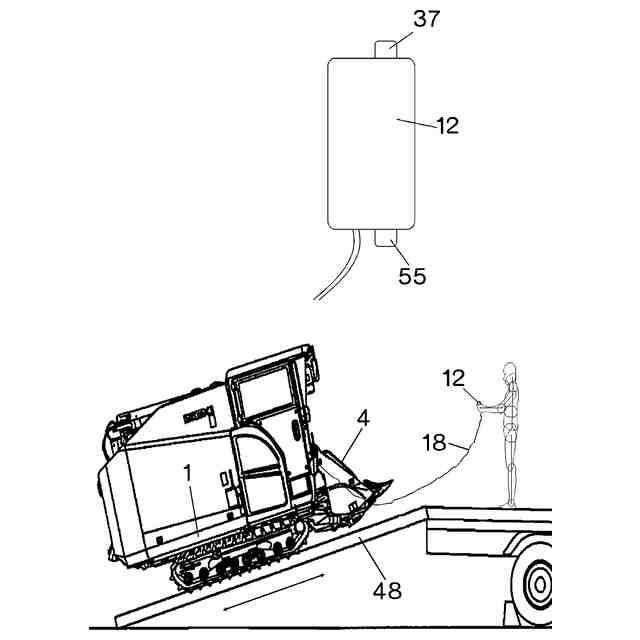
微速前進コントローラ(12)には、操作中のみ微速前進を行わせる微速前進スイッチ(37)と、操作中のみ切替アクチュエータ(13)を非ロック状態に切替可能なロック切替スイッチ(38)と、作業者が微速前進コントローラ(12)を握っていないと、微速前進スイッチ(37)及びロック切替スイッチ(38)を操作していない状態とする保持スイッチ(39)とを設けたことを特徴とする請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に係るものである。
続きを表示(約 6,900 文字)
【背景技術】
【0002】
従来の、コンバインは、副変速レバーの操作位置に、路上走行速度よりも低速で走行系統に伝動する低速モード(Lモード)を設定し、機体の積み降ろしや圃場の出入り、納屋などの収納場所内での走行に適した、低速走行を可能とする構成は、公知である(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-034750号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記公知例では、走行時には主変速レバーを操作して無段変速装置に出力させる必要があり、微速で走行させる際には微細な操作が要求されるので、意図した速度に調節することが難しいという問題がある。
また、主変速レバーに作業者が手を触れて増速側に操作してしまうと、走行速度が速くなり、移動の安全性が低下する問題があると共に、減速側に操作してしまうと、出力が接地抵抗を下回り、走行できなくなる問題がある。
また、従来では作業者は操縦部に乗り込んで微速走行操作する必要があるが、積み降ろしや圃場への出入時に走行装置のクローラーが積み込みの作業台(アユミ)に対して適切位置に位置しているかを目視できない状態で位置合わせを行うことになり、確認をする別の作業者が必要になる。
そのため、一人作業で行う積み降ろしの場合は、位置合わせを確認すべく機体から乗り降りしなければならず、作業能率が低下する問題がある。
本願は、機体の微速走行を容易に行えるようにし、一人作業をも可能にしたものである。
【課題を解決するための手段】
【0005】
請求項1の発明は、圃場を走行する走行装置2と、操縦部6と、対地作業を行う作業装置4と、走行装置2への伝動を減衰、停止させる走行ブレーキ11とを備える作業車両において、機体を微速前進させる微速前進コントローラ12を設け、微速前進コントローラ12は操縦部6から離れた位置に配置し、走行ブレーキ11をロック状態と非ロック状態に切り替える切替アクチュエータ13を設け、走行ブレーキ11がロック状態であるときに微速前進コントローラ12の操作が受付可能になると共に、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替えることで、機体の微速前進が行われる構成としたことを特徴とする作業車両としたものである。
請求項2の発明は、機体の前後進出力を操作する主変速レバー14を操縦部6に設け、主変速レバー14の操作位置を検出するレバーセンサ15を所定位置に設け、機体の移動を検出する移動センサ16を所定位置に設け、切替アクチュエータ13は、レバーセンサ15が主変速レバー14の中立位置を検出し、且つ移動センサ16が機体の移動を検出していない状態であるときに、ブレーキペダル17が所定時間連続して踏み込まれると走行ブレーキ11をロック状態に切り替える構成とし、微速前進コントローラ12は機体前側の作業装置4に設け、微速前進コントローラ12のハーネス18を引き出すことで機体から離れた状態で微速前進コントローラ12の操作が可能な構成としたことを特徴とする作業車両としたものである。
請求項3の発明は、微速前進コントローラ12は、作業装置4の取付位置からハーネス18を引き出さないと操作を受け付けない構成とし、微速前進コントローラ12は、操作しているときに微速前進させ、操作しないと微速前進が停止する構成としたことを特徴とする作業車両としたものである。
請求項4の発明は、作業者の搭乗を検出可能な作業座席25を操縦部6に設け、回転数を検出可能なエンジン26を搭載し、エンジン26の駆動力を前後進及び走行速度として伝動する無段変速装置27を設け、無段変速装置27と走行装置2との伝動経路を切り替える副変速装置28を所定位置に設け、作業装置4の上下位置を検出する作業高さセンサ29を所定位置に設け、機体の車高を検出する車高センサ30を所定位置に設け、微速前進コントローラ12の操作は、主変速レバー14の操作位置が「中立」位置で、副変速装置28が「走行」位置で、作業座席25への着座状態が「離席」であること、走行ブレーキ11が「ロック」であること、作業高さセンサ29が「最高」を検出し、車高センサ30が「最低」を検出し、エンジン26の回転数が「アイドリング」であるときに受付可能になる構成としたことを特徴とする作業車両としたものである。
請求項5の発明は、機体が微速前進の開始前、作動中、及び微速前進の条件が不成立であるときに作動する報知装置35を設け、微速前進の開始時に、エンジン26の回転数を「アイドリング」から「走行最低出力」に増加させ、無段変速装置27の出力を、エンジン26の回転数の上昇に比例して中立位置の回転から設定値まで増大させる構成とし、エンジン26の回転数及び無段変速装置27の出力が微速前進に適した状態になると、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替える構成としたことを特徴とする作業車両としたものである。
請求項6の発明は、微速前進コントローラ12には、操作中のみ微速前進を行わせる微速前進スイッチ37と、操作中のみ切替アクチュエータ13を非ロック状態に切替可能なロック切替スイッチ38と、作業者が微速前進コントローラ12を握っていないと、微速前進スイッチ37及びロック切替スイッチ38を操作していない状態とする保持スイッチ39とを設けたことを特徴とする作業車両としたものである。
【発明の効果】
【0006】
請求項1の発明では、機体を微速前進させる微速前進コントローラ12を設け、微速前進コントローラ12は操縦部6から離れた位置に配置し、走行ブレーキ11をロック状態と非ロック状態に切り替える切替アクチュエータ13を設け、走行ブレーキ11がロック状態であるときに微速前進コントローラ12の操作が受付可能になると共に、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替えることで、機体の微速前進が行われる構成としているので、微速前進コントローラ12の操作で機体を微速前進させることにより、レバー等の微細(微妙)な操作が不要になるので、機体のトラックへの積み下ろしや圃場出入口の移動を安全に行うことができる。
微速前進速度は決まっているので、主変速レバー14の手動操作の際に起こりうる誤操作による急な増速や減速が生じず、移動の安全性が確保されると共に、微速前進していないにもかかわらず、走行が停止して作業が中断されることに気付かずに、作業性が低下することが防止される。
請求項2の発明では、機体の前後進出力を操作する主変速レバー14を操縦部6に設け、主変速レバー14の操作位置を検出するレバーセンサ15を所定位置に設け、機体の移動を検出する移動センサ16を所定位置に設け、切替アクチュエータ13は、レバーセンサ15が主変速レバー14の中立位置を検出し、且つ移動センサ16が機体の移動を検出していない状態であるときに、ブレーキペダル17が所定時間連続して踏み込まれると走行ブレーキ11をロック状態に切り替える構成とし、微速前進コントローラ12は機体前側の作業装置4に設け、微速前進コントローラ12のハーネス18を引き出すことで機体から離れた状態で微速前進コントローラ12の操作が可能な構成としているので、機体が停車状態でブレーキペダル17を所定時間以上踏み込むと、走行ブレーキ11がロック状態に切り替わることにより、作業中等にブレーキペダル17を踏み込んだ際に走行ブレーキ11がロック状態になり、走行が停止することを防止でき、作業能率の低下が防止される。
微速前進コントローラ12を機体前側に設けると共に、ハーネス18を引き出して機体から離れて操作が可能であることにより、機体の移動場所の様子を見ながら作業ができるので作業能率が向上すると共に、機体から離れて作業ができるので、機体と接触することを防止できる。
請求項3の発明では、微速前進コントローラ12は、作業装置4の取付位置からハーネス18を引き出さないと操作を受け付けない構成とし、微速前進コントローラ12は、操作しているときに微速前進させ、操作しないと微速前進が停止する構成としているので、微速前進コントローラ12をハーネスリール19から引き出して使用することにより、作業者は機体から離れた位置で作業することになるので、操作中の作業者が機体と接触することを防止できる。
微速前進コントローラ12の操作中のみ機体の微速前進が行われることにより、操作を止めれば機体も停止するので、積み降ろしや傾斜地での移動を安全に行える。
請求項4の発明では、作業者の搭乗を検出可能な作業座席25を操縦部6に設け、回転数を検出可能なエンジン26を搭載し、エンジン26の駆動力を前後進及び走行速度として伝動する無段変速装置27を設け、無段変速装置27と走行装置2との伝動経路を切り替える副変速装置28を所定位置に設け、作業装置4の上下位置を検出する作業高さセンサ29を所定位置に設け、機体の車高を検出する車高センサ30を所定位置に設け、微速前進コントローラ12の操作は、主変速レバー14の操作位置が「中立」位置で、副変速装置28が「走行」位置で、作業座席25への着座状態が「離席」であること、走行ブレーキ11が「ロック」であること、作業高さセンサ29が「最高」を検出し、車高センサ30が「最低」を検出し、エンジン26の回転数が「アイドリング」であるときに受付可能になる構成としているので、機体が停車状態で、且つ、機体の積み込み作業を適切に行える条件が整わないと、微速前進コントローラ12は操作を受け付けないことにより、積み込み作業時などに機体を破損させたり、微速で走行しないことを防止できる。
請求項5の発明では、機体が微速前進の開始前、作動中、及び微速前進の条件が不成立であるときに作動する報知装置35を設け、微速前進の開始時に、エンジン26の回転数を「アイドリング」から「走行最低出力」に増加させ、無段変速装置27の出力を、エンジン26の回転数の上昇に比例して中立位置の回転から設定値まで増大させる構成とし、エンジン26の回転数及び無段変速装置27の出力が微速前進に適した状態になると、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替える構成としているので、報知装置35で微速前進の開始、及び作動を報知することにより、作業者が機体の移動に気づかないことを防止できる。
また、微速前進を行う条件が不成立でも報知装置35が作動することにより、作業者が微速前進の条件を整え忘れていることに気付かさせられるので、不要な時間の浪費を軽減できる。
すなわち、微速前進は、積載車への積み込み作業等を考慮して、かなり移動速度を極低速にしているため、作業者は微速前進操作を既に行ったと思い込んで漫然と待機してしまうことがあるが、本発明ではこれを防止する。
エンジン26の回転数の増加に比例させて無段変速装置27の出力を増大させることにより、出力の切替を行う作動油の供給が安定的になるので、無段変速装置27に負荷がかかって停止したり、破損したりすることを防止できる。
エンジン26の回転数と無段変速装置27の出力が微速前進に適した状態になってから走行ブレーキ11を非ロック状態とするので、出力不足状態で走行しようとして走行伝動系に負荷がかかり、破損することを防止できる。
請求項6の発明では、微速前進コントローラ12には、操作中のみ微速前進を行わせる微速前進スイッチ37と、操作中のみ切替アクチュエータ13を非ロック状態に切替可能なロック切替スイッチ38と、作業者が微速前進コントローラ12を握っていないと、微速前進スイッチ37及びロック切替スイッチ38を操作していない状態とする保持スイッチ39を設けているので、走行ブレーキ11のロック状態と非ロック状態の切替をスイッチ操作で行うことにより、微速前進を開始するタイミングや停止させるタイミングをコントロールでき、積み降ろしや圃場の出入り操作が安定する。保持スイッチ39により、作業者が微速前進コントローラ12を握っていないときには各スイッチを操作していない状態となるので、作業者が操作不能な状態で機体が移動を続けることを防止できる。
【図面の簡単な説明】
【0007】
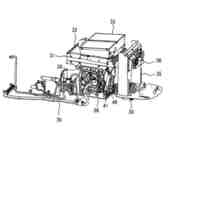
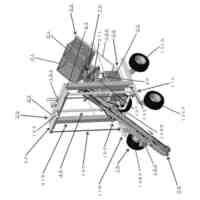
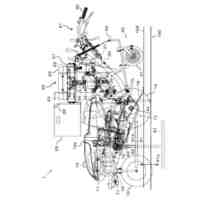
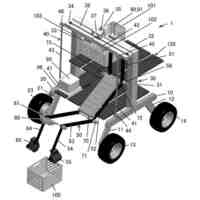
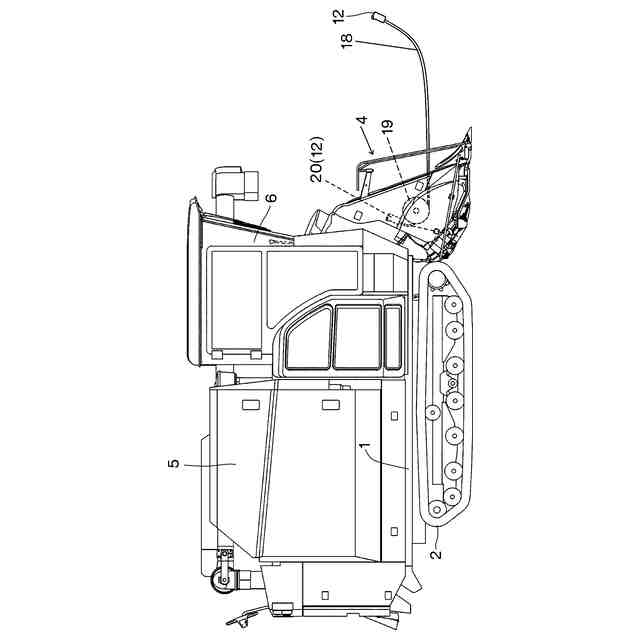
作業車両(コンバイン)の側面図。
同平面図。
操縦部の平面図。
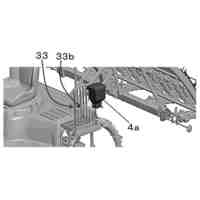
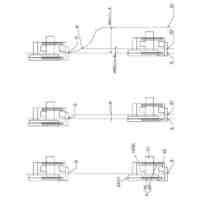
(A)ペダルを操作していないときのアクチュエーター付近の概略側面図。 (B)ペダルを操作したときのアクチュエーター付近の概略側面図。 (C)微速前進スイッチを操作したときのアクチュエーター付近の概略側面図。
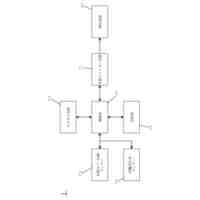
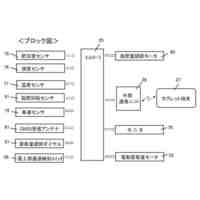
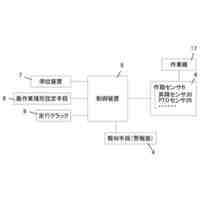
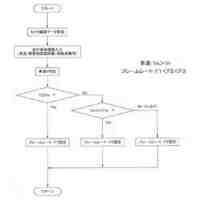
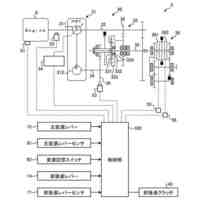
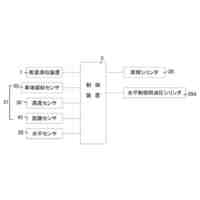
ブロック図。
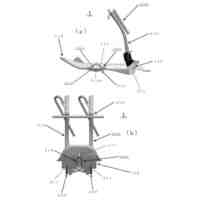
コントローラーの側面図および操作状態図。
別実施形態のコントローラーの側面図および操作状態図。
コントローラーの側面図。
別実施形態のコントローラーの側面図。
(A)別実施形態のコントローラーの背面図。 (B)別実施形態のコントローラーの側面図。
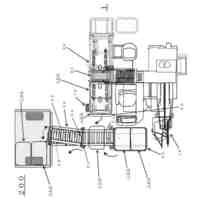
作業車両の積み降ろし状態の側面図。
作業車両の積み降ろし状態の他の実施形態側面図。
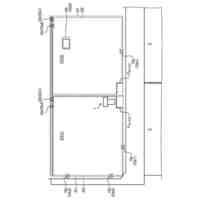
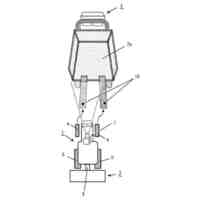
グレンタンクの正面図。
(A)グレンタンクの外側側板を閉じた状態を示す側面図。 (B)グレンタンクの外側側板を作業状態に開放した状態を示す側面図。 (C)グレンタンクの外側側板を清掃状態に開放した状態を示す側面図。
【発明を実施するための最良の形態】
【0008】
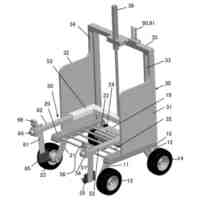
本発明の一実施形態を図面により説明すると、1は機体フレ-ム、2は機体フレ-ム1の下方位置に設けた圃場を走行する走行装置、3は機体フレ-ム1の上方位置に設けた脱穀装置であり、走行装置2の前方に作物を処理する作業装置4を設け、作業装置4が刈取処理した作物を収容するグレンタンク5を設ける。6は操縦部である。
なお、本発明を説明するにあたり、理解を容易にするため、作業車両の走行方向を基準に前後・左右・上下等の方向を示して説明するが、これにより、本発明の構成が限定されることはない。
走行装置2は、左右一対の走行クローラー10を有して構成する。
【0009】
圃場を走行する走行装置2と、操縦部6と、対地作業を行う作業装置4と、走行装置2への伝動を減衰、停止させる走行ブレーキ11とを備える作業車両において、機体を微速前進させる微速前進コントローラ12を設け、微速前進コントローラ12は操縦部6から離れた位置に配置し、走行ブレーキ11をロック状態と非ロック状態に切り替える切替アクチュエータ(ソレノイド)13を設け、走行ブレーキ11がロック状態であるときに微速前進コントローラ12の操作が受付可能になると共に、切替アクチュエータ13が作動して走行ブレーキ11を非ロック状態に切り替えることで、機体の微速前進が行われる構成とする。
走行ブレーキ11は、図示は省略するが、走行装置2へ回転伝達するミッションケース内に設ける。
【0010】
切替アクチュエータ13を作動させると、長孔付きステー44Aが引っ張られ、ブレーキアーム42を回動させ、この時、図において、ブレーキアーム42の回動方向と同じ反時計回り方向にブレーキ軸45が回転し、ミッションケース(図示省略)内に設けられる多板ブレーキ(図示省略)の板体(図示省略)が、板体同士が接触し合う方向に押し込まれ、これらの摩擦力で駆動力による車軸の回転を抑え込み、制動を付与する。
微速前進コントローラ12の操作で機体を微速前進させることにより、レバー(主変速レバー)等の微細(微妙)な操作が不要になるので、機体のトラックへの積み下ろしや圃場出入口(畦等の傾斜地)の移動を安全に行うことができる。
微速前進速度は事前設定により決まっているので、主変速レバーの手動操作の際に起こりうる誤操作による急な増速や減速が生じず、移動の安全性が確保されると共に、微速前進していないにもかかわらず、走行が停止して作業が中断されることに気付かずに、作業性が低下することが防止される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
2日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
田植え機
2か月前
井関農機株式会社
苗移植機
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
エンジン
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
農作業車
2か月前
井関農機株式会社
作業車両
2か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ