TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151409
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052813
出願日
2024-03-28
発明の名称
車両
出願人
株式会社SUBARU
代理人
個人
主分類
B60W
50/10 20120101AFI20251002BHJP(車両一般)
要約
【課題】車両の走行状態/運転者の保舵状態の変化に対応した、精度のよいオーバーライド判定を行う。
【解決手段】車両1は、車両1の運転者のステアリングの保舵状態を検出する保舵状態検出部10と、車両1の走行状態を検出する走行状態検出部20と、ステアリングのトーションバートルク値を検出するトルク検出部30と、保舵状態と走行状態とに基づいて設定されたトーションバートルク閾値と、トーションバートルク値とに基づいてオーバーライド判定を行う制御部50と、を備えている。
【選択図】図2
特許請求の範囲
【請求項1】
車両の運転者のステアリングの保舵状態を検出する保舵状態検出部と、
前記車両の走行状態を検出する走行状態検出部と、
前記ステアリングのトーションバートルク値を検出するトルク検出部と、
前記保舵状態と前記走行状態とに基づいて設定されたトーションバートルク閾値と、前記トーションバートルク値とに基づいてオーバーライド判定を行う制御部と、
を備えることを特徴とする車両。
続きを表示(約 170 文字)
【請求項2】
前記保舵状態検出部は、前記運転者の前記保舵状態が片手保舵/両手保舵/無保舵のいずれであるかを検出することを特徴とする請求項1に記載の車両。
【請求項3】
前記走行状態検出部は、前記車両の前記走行状態がカーブ走行中/直線道路走行中のいずれであるかを検出することを特徴とする請求項1または2に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、車両自体が車両周囲の情報を把握し、運転者に代わって車両を制御するADAS(Advanced DriverAssistance Systems)機能を備えた車両が実用化されている。
【0003】
例えば、車両が運転者に代わってステアリング操舵を行うADAS機能としては、車両が走行中の車両通行帯から逸脱しないようにステアリングを制御して、車両の走行位置を車両通行帯の中央付近に維持するLKS(Lane Keeping System)が挙げられる。
この種の技術として、車両がステアリングを操舵して走行位置を制御しているときには、トーションバートルク値を監視し、トーションバートルク値が所定の閾値を超えた場合には、運転者が強制介入して、右左折や車線変更等のステアリング操作が行われたと判定し(オーバーライド判定)、ステアリング制御をオフして、運転者のステアリング操作を優先させる技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2016-159781号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両が運転者に代わってステアリング操舵を行うADAS機能の実行中、モータによってステアリングシャフトが回転される。
このとき、運転者がステアリングホイールを保持すると、ステアリングシャフトにねじれが発生する。
カーブ走行中は、直線道路走行中に比べてモータの駆動力が大きくなり、ステアリングシャフトに発生するねじれも大きくなる。
したがって、カーブ走行中のトーションバートルク値は、直線道路走行中のトーションバートルク値に比べて大きな値となる。
また、トーションバートルク値が閾値を超えたか否かによって、運転者の強制介入(オーバーライド)を判定する場合、運転者がステアリングホイールを操作したときの保舵状態(片手保舵/両手保舵)によって、片手あたりに必要な操舵力が異なる。
【0006】
しかしながら、上述した特許文献1に記載の技術では、車両の走行状態/運転者の保舵状態によらず、トーションバートルク値が所定の閾値を超えた場合には、ステアリング制御をオフして、運転者のステアリング操作を優先させてしまうために、車両の走行状態/運転者の保舵状態によっては、運転者にオーバーライドする意思がないのにも拘らず、オーバーライド判定されてしまうという課題があった。
【0007】
そこで、本発明は、上述の課題に鑑みてなされたものであって、車両の走行状態/運転者の保舵状態の変化に対応した、精度のよいオーバーライド判定を行う車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
形態1;本発明の1またはそれ以上の実施形態は、車両の運転者のステアリングの保舵状態を検出する保舵状態検出部と、前記車両の走行状態を検出する走行状態検出部と、前記ステアリングのトーションバートルク値を検出するトルク検出部と、前記保舵状態と前記走行状態とに基づいて設定されたトーションバートルク閾値と、前記トーションバートルク値とに基づいてオーバーライド判定を行う制御部と、を備える車両を提案している。
【発明の効果】
【0009】
本発明の1またはそれ以上の実施形態によれば、車両の走行状態/運転者の保舵状態の変化に対応した、精度のよいオーバーライド判定を行うことができるという効果がある。
【図面の簡単な説明】
【0010】
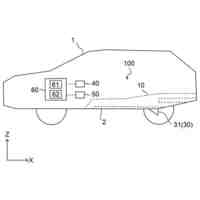
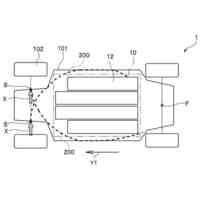
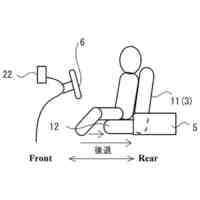
本発明の実施形態に係る車両の構成を示す図である。
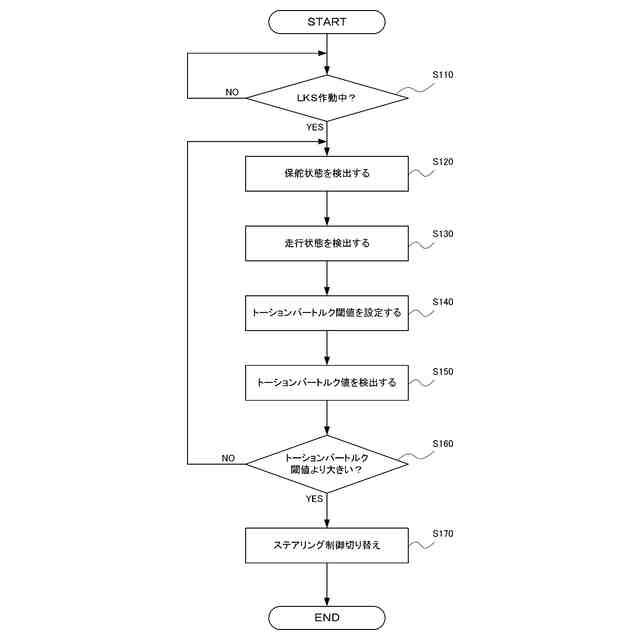
本発明の実施形態に係る車両のオーバーライド判定処理のフローを示した図である。
本発明の実施形態に係る車両の制御部が設定するトーションバートルク閾値を示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
27日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
整流システム
1か月前
株式会社SUBARU
運転支援装置
27日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車体前部構造
20日前
株式会社SUBARU
車体前部構造
20日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
操作システム
19日前
株式会社SUBARU
シフト制御装置
6日前
株式会社SUBARU
電動式全輪駆動車
1か月前
株式会社SUBARU
車両用電池パック
6日前
株式会社SUBARU
エンジン制御装置
19日前
株式会社SUBARU
車両用周辺監視装置
1か月前
株式会社SUBARU
車両の降車補助装置
1か月前
株式会社SUBARU
ドアロック制御装置
20日前
株式会社SUBARU
電波吸収体の製造方法
12日前
株式会社SUBARU
車両の車高自動調整装置
1か月前
株式会社SUBARU
車体構造部材の結合構造
1か月前
株式会社SUBARU
運転支援装置および車両
1か月前
株式会社SUBARU
運転補助装置および車両
27日前
株式会社SUBARU
カーテンエアバッグ装置
22日前
株式会社SUBARU
車両用高圧燃料配管構造
6日前
株式会社SUBARU
インフレータブル構造体
6日前
株式会社SUBARU
乗物用遮音構造体、及び車両
1か月前
株式会社SUBARU
フロントピラートリムの取付構造
12日前
株式会社SUBARU
車両および車両用忘れ物防止システム
27日前
しげる工業株式会社
車両用レジスタ装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ