TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159562
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062229
出願日
2024-04-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
63/114 20060101AFI20251014BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 通常の耕耘装置制御が作業者のマニュアル補正操作なくそのまま利用されるとき、耕耘後の圃場面が車体旋回位置で十分に均平化されにくい。
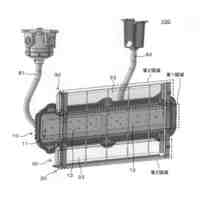
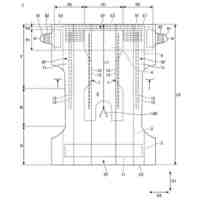
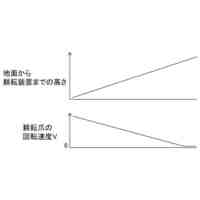
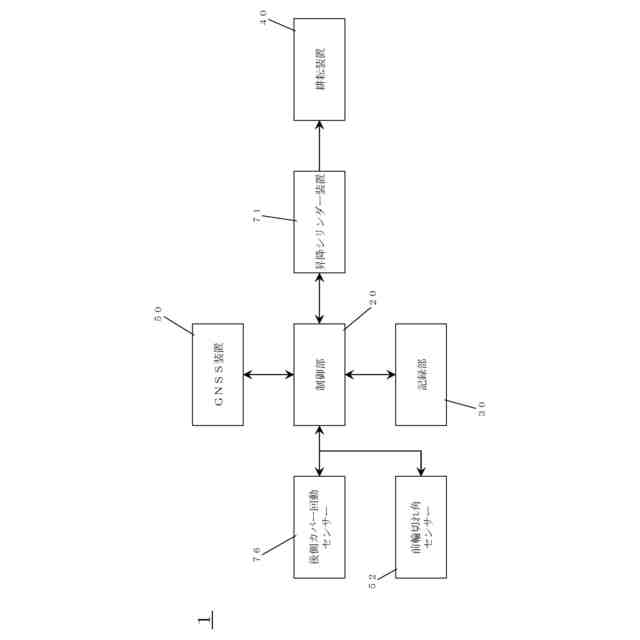
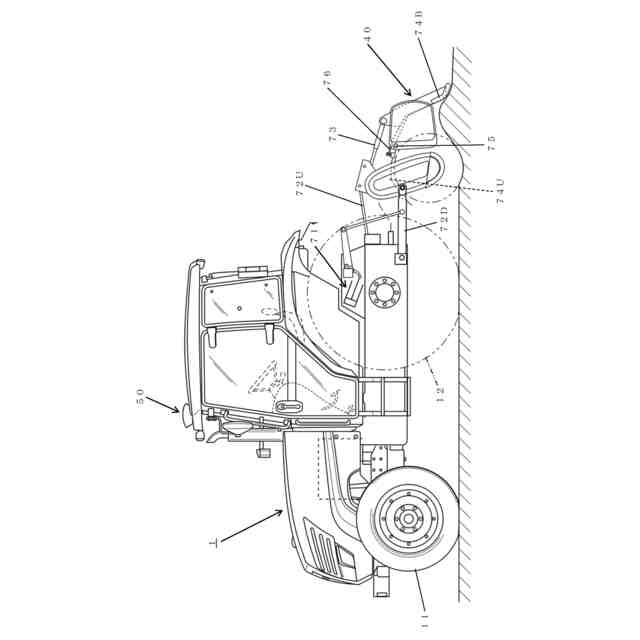
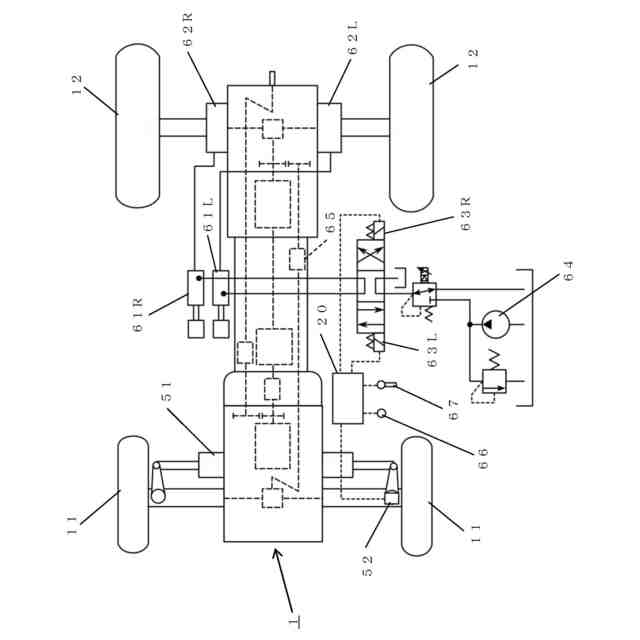
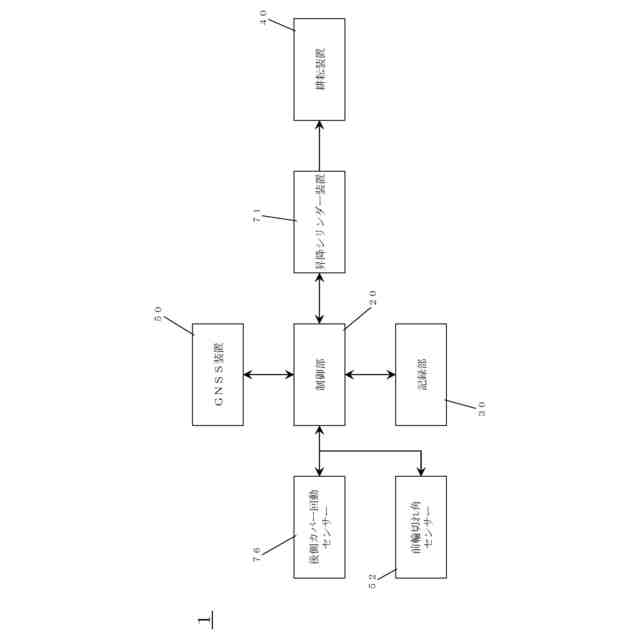
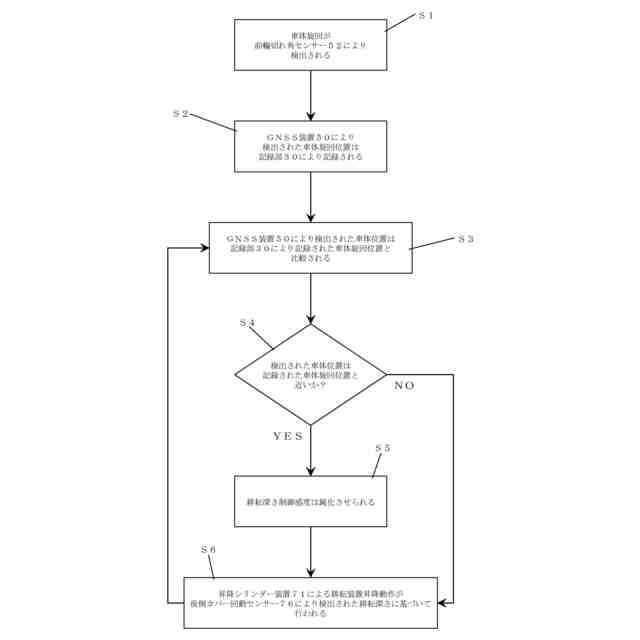
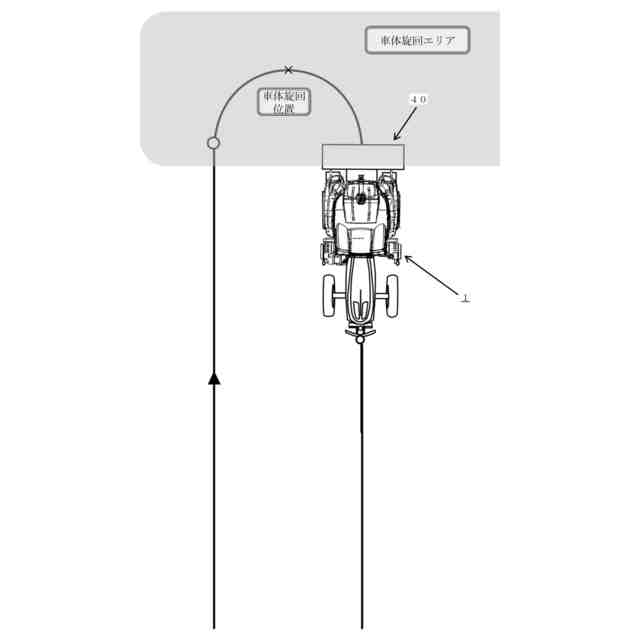
【解決手段】 直進走行および旋回走行を繰返しながら、耕耘装置40で耕耘を行うトラクター1であって、車体旋回位置を記録する記録部30と、耕耘装置40の耕耘深さを所定の耕耘深さ制御感度で制御する制御部20と、を備えており、耕耘が記録された車体旋回位置を含むあらかじめ定められた大きさの車体旋回エリアにおいて直進走行で行われるとき、制御部20は、車体旋回エリア以外のエリアにおける直進走行での耕耘深さ制御感度より小さい耕耘深さ制御感度で、耕耘深さを制御するトラクター1である。
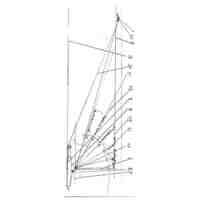
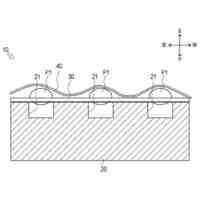
【選択図】 図3
特許請求の範囲
【請求項1】
直進走行および旋回走行を繰返しながら、耕耘装置で耕耘を行う作業車両であって、
車体旋回位置を記録する記録部と、
前記耕耘装置の耕耘深さを所定の耕耘深さ制御感度で制御する制御部と、
を備えており、
前記耕耘が前記記録された車体旋回位置を含むあらかじめ定められた大きさの車体旋回エリアにおいて前記直進走行で行われるとき、前記制御部は、前記車体旋回エリア以外のエリアにおける前記直進走行での前記耕耘深さ制御感度より小さい前記耕耘深さ制御感度で、前記耕耘深さを制御することを特徴とする作業車両。
続きを表示(約 1,300 文字)
【請求項2】
前記耕耘装置の水平制御が有効である場合において、前記耕耘が前記車体旋回エリアにおいて前記直進走行で行われるときでも、前記制御部は、前記車体旋回エリア以外の前記エリアにおける前記直進走行での前記耕耘深さ制御感度で、前記耕耘深さを制御することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記車体旋回位置は、前輪の操舵動作、前記耕耘装置の昇降動作、後輪の片ブレーキ動作、および車体位置のGNSS情報の内の少なくとも一つに基づいて記録されることを特徴とする請求項1に記載の作業車両。
【請求項4】
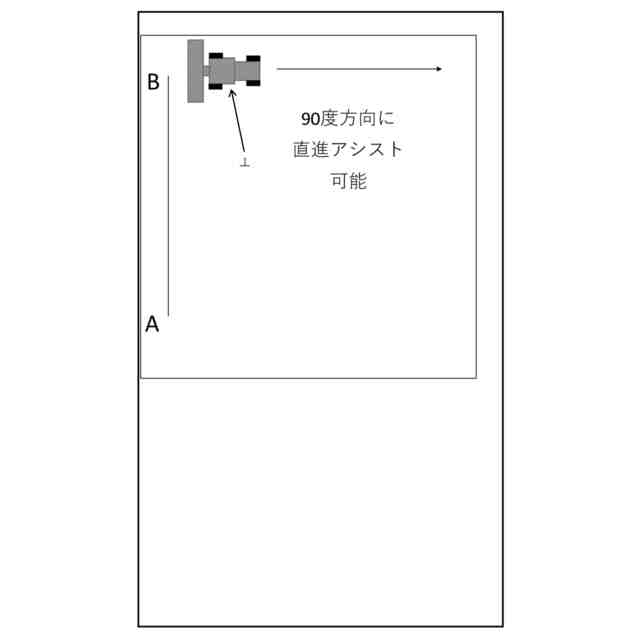
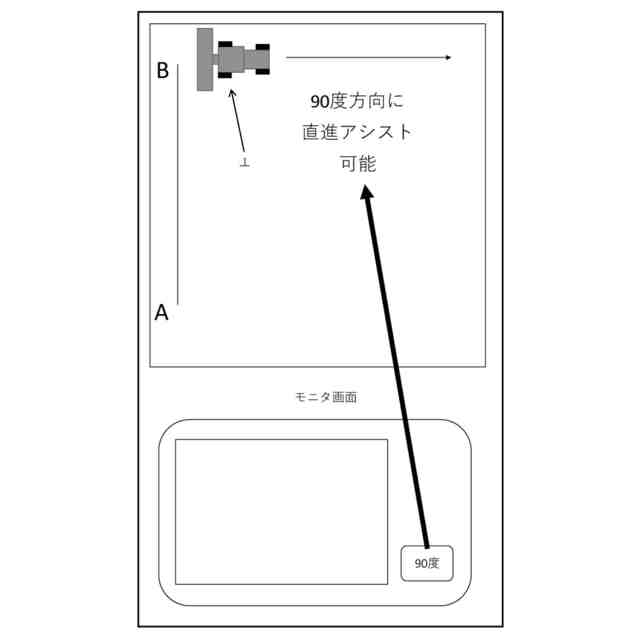
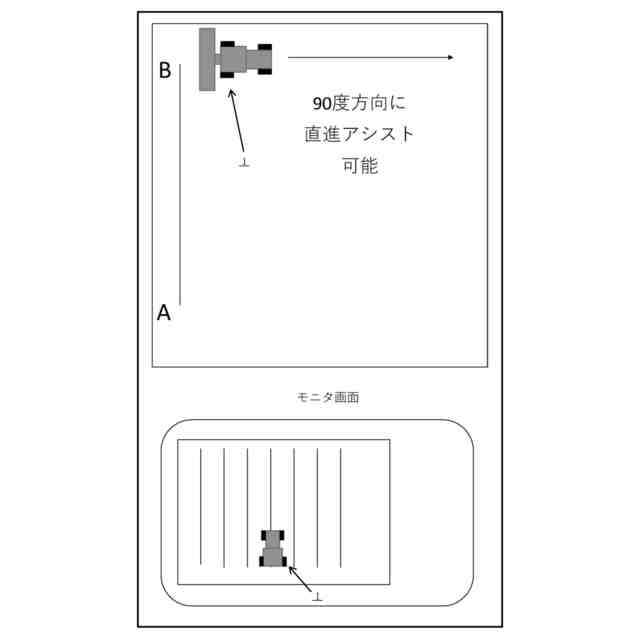
畦方向と平行である第一走行ライン方向および第二走行ライン方向が、直進走行アシストにおける走行ラインを決定するために設定され、
前記第一走行ライン方向は、往復直進走行を行うために利用され、
前記第二走行ライン方向は、枕地直進走行を行うために利用されることを特徴とする請求項3に記載の作業車両。
【請求項5】
前記第一走行ライン方向の前記直進走行が行われる前に、前記第二走行ライン方向を決定するC点およびD点が非耕耘マニュアル走行で指定され、その後に、前記第一走行ライン方向を決定するA点およびB点が耕耘マニュアル走行で指定されることを特徴とする請求項4に記載の作業車両。
【請求項6】
前記第一走行ライン方向を決定するA点およびB点が耕耘マニュアル走行で指定され、前記第一走行ライン方向の前記直進走行が行われた後に、前記第二走行ライン方向を決定するC点およびD点が耕耘マニュアル走行で指定されることを特徴とする請求項4に記載の作業車両。
【請求項7】
前記第一走行ライン方向を決定するA点およびB点が耕耘マニュアル走行で指定され、前記第二走行ライン方向は前記決定された第一走行ライン方向と所定の角度をなす走行ライン方向として決定されることを特徴とする請求項4に記載の作業車両。
【請求項8】
前記走行ラインは、ユーザー操作に基づいた平行移動で変更可能であり、
前記往復直進走行が行われているとき、一回の前記ユーザー操作が行われるたびに前記走行ラインを前記平行移動で変更する場合における往復直進走行ライン変更量があらかじめ設けられており、
前記枕地直進走行が行われているとき、一回の前記ユーザー操作が行われるたびに前記走行ラインを前記平行移動で変更する場合における枕地直進走行ライン変更量があらかじめ設けられていることを特徴とする請求項5から7のいずれかに記載の作業車両。
【請求項9】
前記枕地直進走行ライン変更量は、前記往復直進走行ライン変更量より小さいことを特徴とする請求項8に記載の作業車両。
【請求項10】
前記走行ラインが前記ユーザー操作に基づいた前記平行移動で変更された後に、前記変更された走行ラインへ向かう自動的な車体移動が行われ、
前記枕地直進走行が行われているときの前記自動的な車体移動にかかる時間は、前記往復直進走行が行われているときの前記自動的な車体移動にかかる時間より長いことを特徴とする請求項9に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクターのような作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
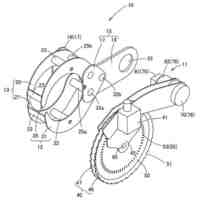
耕耘上面カバー及び耕耘上面カバーに揺動可能に連結された耕耘リヤカバーを含む耕耘カバーがカバー回動用アクチュエータによって耕耘爪軸の軸線回りに前後へ回動可能とされた耕耘機の耕深位置を設定耕深位置に追従させる自動耕深制御を行うように構成された耕深制御装置であって、耕耘機を非耕耘状態位置から下降させて自動耕深制御での耕耘作業を開始させる際に、耕耘機の接地から一定区間又は一定期間においては、自動耕深制御を停止すると共に、耕耘リヤカバーの接地長さが延長されるようにカバー回動用アクチュエータを作動させる耕耘制御装置が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-110924号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、ユーザーのさまざまなニーズを考慮し、便利な機能が作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来のトラクターのような作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、通常の耕耘装置制御が作業者のマニュアル補正操作なくそのまま利用されるとき、耕耘後の圃場面が車体旋回位置で十分に均平化されにくいことに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、直進走行および旋回走行を繰返しながら、耕耘装置で耕耘を行う作業車両であって、
車体旋回位置を記録する記録部と、
前記耕耘装置の耕耘深さを所定の耕耘深さ制御感度で制御する制御部と、
を備えており、
前記耕耘が前記記録された車体旋回位置を含むあらかじめ定められた大きさの車体旋回エリアにおいて前記直進走行で行われるとき、前記制御部は、前記車体旋回エリア以外のエリアにおける前記直進走行での前記耕耘深さ制御感度より小さい前記耕耘深さ制御感度で、前記耕耘深さを制御することを特徴とする作業車両である。
【0009】
第2の本発明は、前記耕耘装置の水平制御が有効である場合において、前記耕耘が前記車体旋回エリアにおいて前記直進走行で行われるときでも、前記制御部は、前記車体旋回エリア以外の前記エリアにおける前記直進走行での前記耕耘深さ制御感度で、前記耕耘深さを制御することを特徴とする第1の本発明の作業車両である。
【0010】
第3の本発明は、前記車体旋回位置は、前輪の操舵動作、前記耕耘装置の昇降動作、後輪の片ブレーキ動作、および車体位置のGNSS情報の内の少なくとも一つに基づいて記録されることを特徴とする第1の本発明の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
産卵床
9日前
個人
平板植栽
10日前
個人
果実袋
9日前
個人
移動体草刈り機
9日前
個人
養殖器具
9日前
個人
水田排水量調整器具
9日前
株式会社剛樹
釣り竿
23日前
井関農機株式会社
圃場作業機
2日前
有限会社信英精密
括り罠
17日前
積水樹脂株式会社
シート止め具
9日前
個人
網口高さのベクトル底引き網
9日前
個人
粘着板で挟むネズミ捕り装置
9日前
株式会社サワエ
害虫捕獲器
2日前
井関農機株式会社
苗移植機
17日前
三恵技研工業株式会社
ルアー
9日前
株式会社アテックス
芝草の刈取装置
16日前
株式会社中村工務店
潅水装置
10日前
個人
つる状多肉植物の製造方法
6日前
個人
自閉式「洗濯バサミ型」虫捕獲器
17日前
個人
ルアーに可動式の顎を設けた疑似餌。
2日前
株式会社エヌエスシー
鳥害防止装置
17日前
新・産業洗浄株式会社
陸上養殖装置
9日前
星和電機株式会社
防爆形捕虫器
9日前
大王製紙株式会社
ペット用吸収性物品
2日前
大和ハウス工業株式会社
栽培器具
9日前
株式会社信日康
昆虫忌避剤を含有するポリマー
2日前
株式会社信日康
昆虫忌避剤を含有するポリマー
2日前
株式会社クボタ
農業機械
9日前
株式会社クボタ
作業車両
23日前
株式会社FieldWorks
無人移動体
10日前
株式会社シマノ
エサ箱
9日前
個人
長ネギ栽培装置
2日前
グローブライド株式会社
リールシート
9日前
伊東電機株式会社
作業車両用アタッチメント
3日前
株式会社和田電業社
間伐システム及び間伐方法
3日前
株式会社LAINGS
愛玩動物用ケージのカバー
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ