TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159464
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062026
出願日
2024-04-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01B
69/00 20060101AFI20251014BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動運転が不安定となり蛇行が生じることによって作業精度が低下する事態を防止できる作業車両を提供する。
【解決手段】測位装置30で検出された走行車体2の位置を左右に補正するための補正量を作業者の操作により調節する補正量操作部と、補正量操作部の操作に基づき、左右の補正量を変更可能な制御装置とを備えた作業車両であって、補正量操作部は、レバー部を中立位置から右方向に操作する右位置及び右端位置と、中立位置から左方向に操作する左位置及び左端位置に操作可能、かつレバー部を右位置よりも右方へ、または左位置より左方へと傾倒操作すると、レバー部を押し戻す方向に付勢力が働く。制御装置は、自動運転時にレバー部が右端位置に操作されると、左方向の補正量を一定の速度で増加させて走行車体を右方向へと移動させ、左端位置に操作されると、右方向の一定の速度で補正量を増加させて走行車体を左方向へと移動させる。
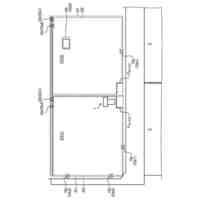
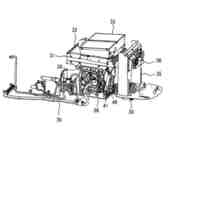
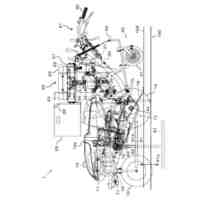
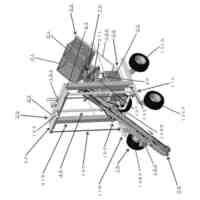
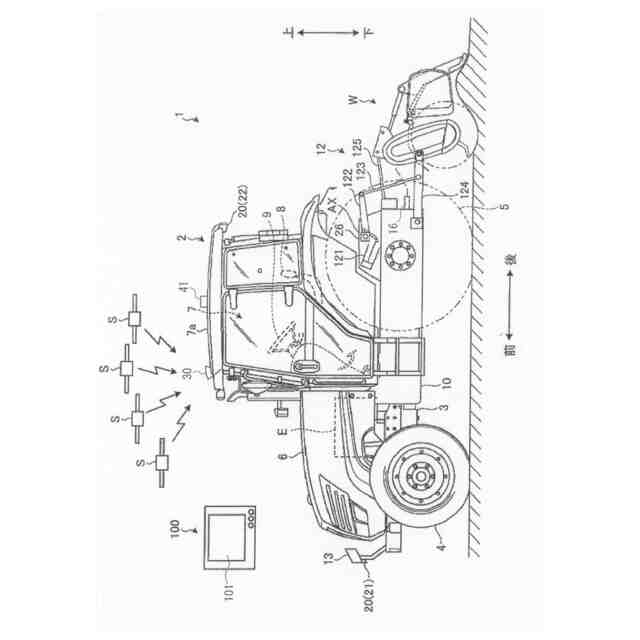
【選択図】図1
特許請求の範囲
【請求項1】
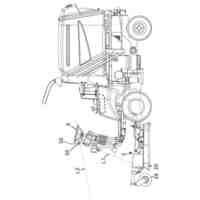
操舵輪を備えて圃場を走行可能に構成された走行車体と、
前記操舵輪の操舵を行うステアリングホイールと、
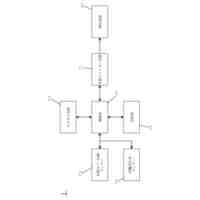
前記走行車体に設けられ且つ測位衛星の信号に基づいて前記走行車体の位置を検出する測位装置と、
前記測位装置で検出された前記走行車体の位置に基づいて、前記ステアリングホイールによる手動操舵とは別に前記走行車体の操舵を自動操舵する自動操舵手段と、
前記測位装置で検出された前記走行車体の位置を左右に補正するための設定値である左右の補正量を、作業者の操作により調節するための補正量操作部と、
前記補正量操作部の操作に基づき、前記左右の補正量を変更可能な制御装置とを備えた作業車両であって、
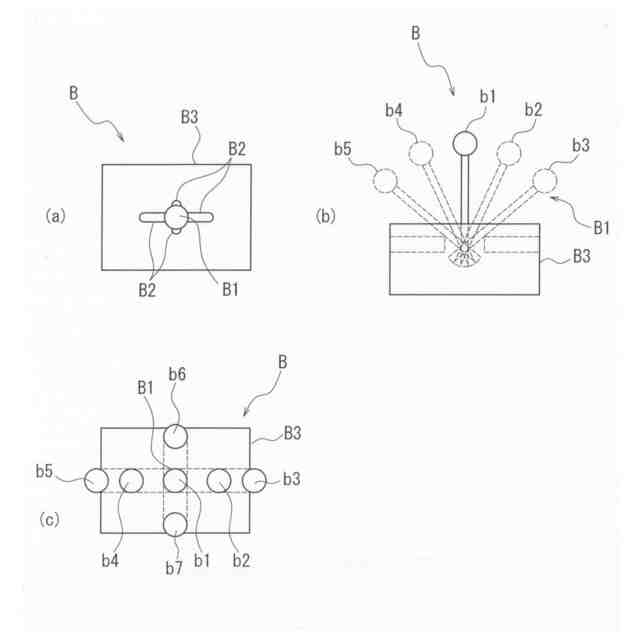
前記補正量操作部は、操作位置を決定するレバー部を中立位置から少なくとも左右2方向に操作可能に構成され、前記中立位置から右方向に操作すると右位置及び右端位置に、前記中立位置から左方向に操作すると左位置及び左端位置に操作可能に構成されており、かつ、前記レバー部を右位置よりも右方の右端位置に、または、左位置より左方の左端位置に傾倒操作すると、前記レバー部を押し戻す方向へと付勢力が働くよう構成されており、
前記制御装置は、自動運転時に、前記レバー部が、右端位置に操作されると、左方向の補正量を一定の速度で増加させて前記走行車体を右方向へと移動させ、また、左端位置に操作されると、右方向の一定の速度で補正量を増加させて前記走行車体を左方向へと移動させるよう構成されたことを特徴とする作業車両。
続きを表示(約 1,200 文字)
【請求項2】
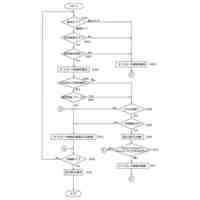
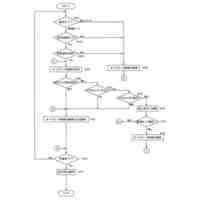
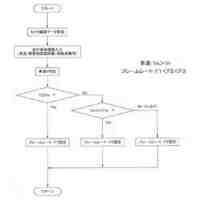
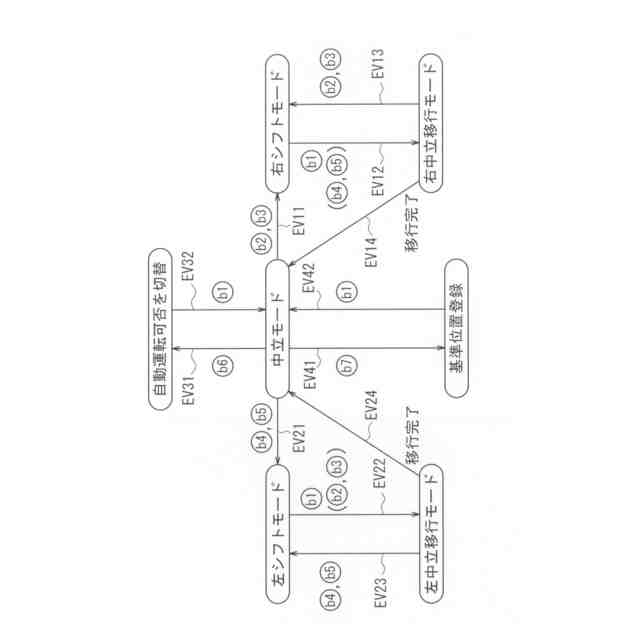
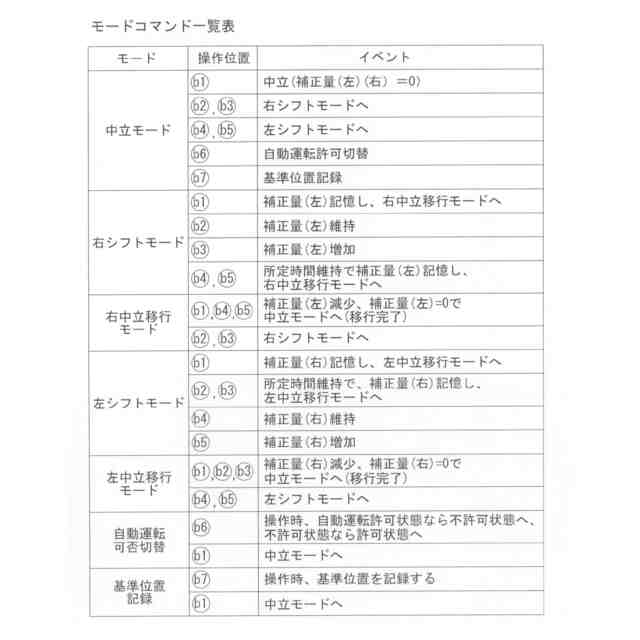
前記制御装置は、自動運転時に、前記測位装置で検出された前記走行車体の位置を基準として自動操舵を行う中立モードと、前記測位装置で検出された前記走行車体の位置を左方向に補正して、前記走行車体を右方向にシフトする右シフトモードと、前記測位装置で検出された前記走行車体の位置を右方向に補正して、前記走行車体を左方向にシフトする左シフトモードとを備え、
さらに、前記右シフトモードから前記中立モードに移行する際の中間モードである右中立移行モードと、前記左シフトモードから前記中立モードに移行する際の中間モードである左中立移行モードとを備え、
前記右シフトモードにおいては、前記補正量操作部を右端位置に操作すると、左方向の前記補正量を一定の速度で増加させて、前記走行車体を徐々に、右方向に移動させつつ走行可能に構成され、
前記左シフトモードにおいては、前記補正量操作部を左端位置に操作すると、右方向の前記補正量を一定の速度で増加させて、前記走行車体を徐々に、左方向に移動させつつ走行可能に構成され、
前記右中立移行モードにおいては、左方向の前記補正量を一定の速度で減少させて、前記走行車体を徐々に、右シフト位置から中立位置に移動させつつ走行させ、前記補正量操作部を中立位置から右方向に操作すると、操作時点の前記補正量を維持して再度前記右シフトモードに移行するよう構成され、さらに、
前記左中立移行モードにおいては、右方向の前記補正量を一定の速度で減少させて、前記走行車体を徐々に、左シフト位置から中立位置に移動させつつ走行させ、前記補正量操作部を中立位置から左方向に操作すると、操作時点の前記補正量を維持して再度前記左シフトモードに移行するよう構成されたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、前記右シフトモードから前記右中立移行モードに移行したとき、または、前記左シフトモードから前記左中立移行モードに移行したとき、移行時の前記補正量を記憶するよう構成され、前記中立モードから、前記右シフトモードまたは前記左シフトモードに移行する際に、記憶された前記補正量の値を設定することを特徴とする請求項2に記載の作業車両。
【請求項4】
前記右中立移行モード時または前記左中立移行モード時において、前記補正量を減少させる速さは、前記右シフトモード時または前記左シフトモード時において、前記補正量を増加させる速さよりも緩やかであることを特徴とする請求項3に記載の作業車両。
【請求項5】
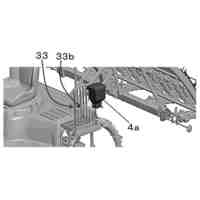
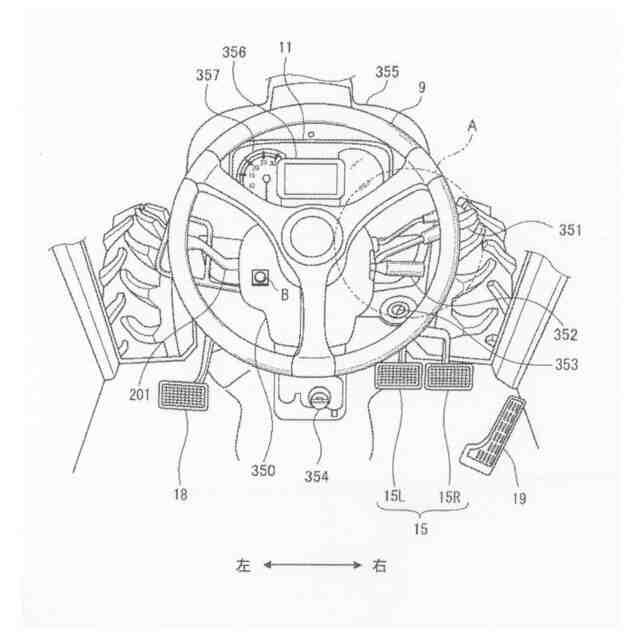
前記補正量操作部は、前記ステアリングホイールの近傍に配設され、
前記右シフトモード時または前記左シフトモード時に、前記補正量が上限値に達するとその旨を作業者に報知することを特徴とする請求項2から請求項4のいずれか1項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場を自動運転しながら農作業を行う作業車両に関するものである。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、例えば、下記特許文献1や特許文献2に示されるように、衛星を利用した測位装置から得られる位置情報を利用し、圃場を自動運転しながら農作業(以下、単に作業という。)を行う作業車両が知られている。この種の自動運転式の作業車両は、手動運転と自動運転とを切り替え可能となっており、自動運転時、予め設計された走行予定ラインに沿って機体が走行するように、取得した位置情報に基づき、機体の現在位置と走行予定ラインとの偏差を算出し、算出された偏差が解消する方向へ、操舵部材(ステアリングハンドル等)を自動操舵する仕組みとなっている。
【0003】
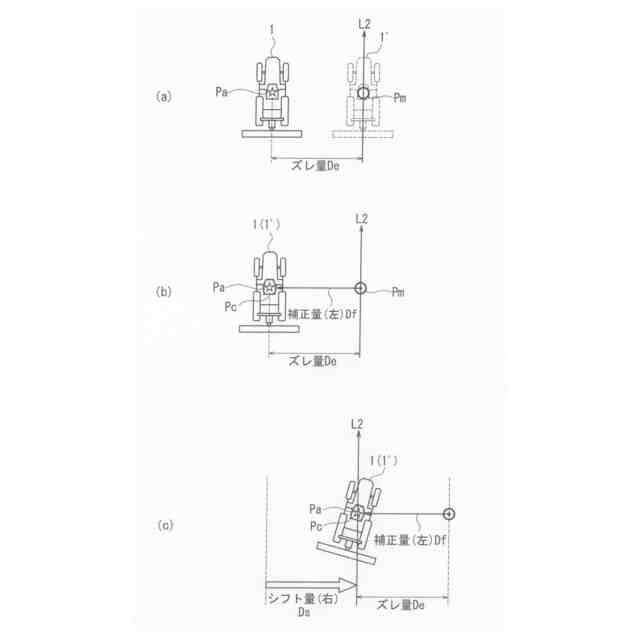
さらに、特許文献3には、測位装置の測位に誤差が生じた場合に、測位装置によって測定された機体の位置を補正する補正スイッチを運転者が操作することで、走行予定ラインと機体との位置のズレ(差分ともいう。)を解消することのできる作業車両が開示されている。例えば、何らかの要因により、測位装置で検出された機体の位置が、右側にズレた場合に、機体は、走行予定ラインに対して、左側を走行することとなるが、係る技術によれば、機体が走行予定ラインに対して、左側にずれたことを認識した運転者が、補正スイッチを操作し、測位装置によって測定された機体の位置を右側へと補正することで、機体を走行予定ライン上に復帰させることができる。
【先行技術文献】
【特許文献】
【0004】
特開2019-187351号公報
特開2021-069291号公報
特開2020-06872号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献3に記載のような従来の作業車両は、走行予定ラインと機体との位置のズレを解消するための操作スイッチの操作が煩雑であり、作業者の混乱を招きやすかった。加えて、機体の位置を微調整することが難しかった。これにより、作業速度が低下する問題があった。
【0006】
そこで、本発明は、このような問題を解消し、走行予定ラインと機体との位置のズレを解消するための操作スイッチの操作を容易に行うことができ、加えて、機体の位置を微調整することも容易な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するため、第1の発明は、
操舵輪を備えて圃場を走行可能に構成された走行車体と、
前記操舵輪の操舵を行うステアリングホイールと、
前記走行車体に設けられ且つ測位衛星の信号に基づいて前記走行車体の位置を検出する測位装置と、
前記測位装置で検出された前記走行車体の位置に基づいて、前記ステアリングホイールによる手動操舵とは別に前記走行車体の操舵を自動操舵する自動操舵手段と、
前記測位装置で検出された前記走行車体の位置を左右に補正するための設定値である左右の補正量を、作業者の操作により調節するための補正量操作部と、
前記補正量操作部の操作に基づき、前記左右の補正量を変更可能な制御装置とを備えた作業車両であって、
前記補正量操作部は、操作位置を決定するレバー部を中立位置から少なくとも左右2方向に操作可能に構成され、前記中立位置から右方向に操作すると右位置及び右端位置と、前記中立位置から左方向に操作すると左位置及び左端位置に操作可能に構成されており、かつ、前記レバー部を右位置よりも右方の右端位置に、または、左位置より左方の左端位置に傾倒操作すると、前記レバー部を押し戻す方向へと付勢力が働くよう構成されており、
前記制御装置は、自動運転時に、前記レバー部が、右端位置に操作されると、左方向の補正量を一定の速度で増加させて前記走行車体を右方向へと移動させ、また、左端位置に操作されると、右方向の補正量を一定の速度で増加させて前記走行車体を左方向へと移動させるよう構成されたことを特徴とする作業車両を提供する。
【0008】
上記第1の発明によれば、補正量操作部の2方向の操作により、走行予定ラインと機体との位置のズレを解消するための操作スイッチの操作を容易に行うことができ、加えて、レバー部を右位置よりも右方へ、または、左位置より左方へと傾倒操作すると、レバー部を押し戻す方向へと付勢力が働くよう構成され、機体の位置を微調整することも容易である。
【0009】
第2の発明は、上記第1の発明の構成に加え、
前記制御装置は、自動運転時に、前記測位装置で検出された前記走行車体の位置を基準として自動操舵を行う中立モードと、前記測位装置で検出された前記走行車体の位置を左方向に補正して、前記走行車体を右方向にシフトする右シフトモードと、前記測位装置で検出された前記走行車体の位置を右方向に補正して、前記走行車体を左方向にシフトする左シフトモードとを備え、
さらに、前記右シフトモードから前記中立モードに移行する際の中間モードである右中立移行モードと、前記左シフトモードから前記中立モードに移行する際の中間モードである左中立移行モードとを備え、
前記右シフトモードにおいては、前記補正量操作部を右端位置に操作すると、左方向の前記補正量を一定の速度で増加させて、前記走行車体を徐々に、右方向に移動させつつ走行可能に構成され、
前記左シフトモードにおいては、前記補正量操作部を左端位置に操作すると、右方向の前記補正量を一定の速度で増加させて、前記走行車体を徐々に、左方向に移動させつつ走行可能に構成され、
前記右中立移行モードにおいては、左方向の前記補正量を一定の速度で減少させて、前記走行車体を徐々に、右シフト位置から中立位置に移動させつつ走行させ、前記補正量操作部を中立位置から右方向に操作すると、操作時点の前記補正量を維持して再度前記右シフトモードに移行するよう構成され、さらに、
前記左中立移あ行モードにおいては、右方向の前記補正量を一定の速度で減少させて、前記走行車体を徐々に、左シフト位置から中立位置に移動させつつ走行させ、前記補正量操作部を中立位置から左方向に操作すると、操作時点の前記補正量を維持して再度前記左シフトモードに移行するよう構成されたことを特徴とする。
【0010】
上記第2の発明によれば、上記第1の発明の効果に加え、ワンタッチの操作で、機体が中立位置に戻る際に、走行予定ライン上に位置するように迅速に調節でき、これにより、左右いずれかの方向にシフトした機体が走行予定ライン上を通り過ぎてライン上から外れてしまうことを防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
8日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
苗移植機
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
エンジン
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
乗用芝刈機
2か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
圃場作業機
1日前
井関農機株式会社
圃場作業機
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ