TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173387
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078950
出願日
2024-05-14
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20251119BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】安価に自動走行を実行可能な作業車両を提供すること。
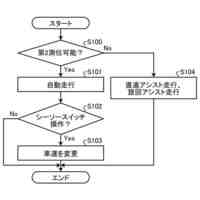
【解決手段】実施形態の一態様に係る作業車両は、運転者が着座可能な運転座席を有する走行車体と、走行車体の前後進を切り替える第1操作部と、走行車体が自動走行している場合に、自動走行中の走行車体の車速を設定可能な第2操作部と、走行車体の自動走行を実行させる制御装置とを備える。制御装置は、自動走行中に第2操作部が運転者によって操作された場合、自動走行を維持しつつ、走行車体の車速を変更する。
【選択図】図5
特許請求の範囲
【請求項1】
運転者が着座可能な運転座席を有する走行車体と、
前記走行車体の前後進を切り替える第1操作部と、
前記走行車体が自動走行している場合に、自動走行中の前記走行車体の車速を設定可能な第2操作部と、
前記走行車体の自動走行を実行させる制御装置と
を備え、
前記制御装置は、自動走行中に前記第2操作部が前記運転者によって操作された場合、前記自動走行を維持しつつ、前記走行車体の車速を変更する、作業車両。
続きを表示(約 1,000 文字)
【請求項2】
前記走行車体は、自動走行中に前記走行車体に作業資材が補充される場合、前記第2操作部の操作に応じて畦まで走行する、請求項1に記載の作業車両。
【請求項3】
第1測位、および、第2測位によって前記走行車体の位置を検出可能な位置検出装置を備え、
前記第2測位は、前記第1測位より検出精度が高く、
前記制御装置は、
前記第2測位によって検出される前記走行車体の位置に基づいて、自動走行を実行し、
自動走行中に、前記第2測位によって前記走行車体の位置が検出できない場合、前記第1測位による直進アシスト走行、および、旋回アシスト走行の少なくとも一方を実行させる、請求項1に記載の作業車両。
【請求項4】
前記制御装置は、前記第2測位によって検出された前記走行車体の位置に基づいた経路の往復工程の方位角を用いて、前記直進アシスト走行における基準線を取得する、請求項3に記載の作業車両。
【請求項5】
前記制御装置は、圃場の畦の3辺に沿って走行するティーチング走行の3辺目の走行時に、前記直進アシスト走行における基準線を取得する、請求項3に記載の作業車両。
【請求項6】
前記第2操作部は、前記走行車体の進行方向に沿って操作されるように配置されるスイッチである、請求項1に記載の作業車両。
【請求項7】
前記第2操作部は、運転者が足で操作可能なアクセルペダルである、請求項1に記載の作業車両。
【請求項8】
前記アクセルペダルに対する踏み込みの有無を検出するリミットスイッチを備え、
前記制御装置は、自動走行中に、前記アクセルペダルが踏まれている場合、前記走行車体を加速させ、自動走行中に、前記走行車体の車速が最高速となった場合、前記走行車体の車速を前記最高速に維持する、請求項7に記載の作業車両。
【請求項9】
前記制御装置は、自動走行中に、前記アクセルペダルが踏まれた状態から、前記アクセルペダルが踏まれない状態に変化した場合、前記走行車体を減速させた後に、前記走行車体の車速を、所定車速に維持する、請求項8に記載の作業車両。
【請求項10】
前記制御装置は、前記アクセルペダルが踏まれた状態から、前記アクセルペダルが踏まれていない状態に変化した場合、前記走行車体を減速させた後に、前記走行車体を停止させる、請求項8に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、運転者が乗らずに無人走行可能な作業車両が知られている(たとえば、特許文献1参照)。このような作業車両は、運転者による操作によらず、圃場の作業を行う自動走行を実行する。このような作業車両は、障害物を検出するための障害物センサや、作業車両が圃場でスタックすることを抑制する駆動制御などが搭載される。
【先行技術文献】
【特許文献】
【0003】
特開2023-91595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記する作業車両は、障害物センサなどが必要となり、高価となる。また、上記する作業車両は、運転者が作業車両に乗らずに作業を行うことができるが、作業を進めるためには、作業者が圃場の近辺で作業車両を監視する必要がある。
【0005】
本発明は、上記に鑑みてなされたものであって、安価に自動走行を実行可能な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両は、運転者が着座可能な運転座席を有する走行車体と、走行車体の前後進を切り替える第1操作部と、走行車体が自動走行している場合に、自動走行中の走行車体の車速を設定可能な第2操作部と、走行車体の自動走行を実行させる制御装置とを備える。制御装置は、自動走行中に第2操作部が運転者によって操作された場合、自動走行を維持しつつ、走行車体の車速を変更する。
【発明の効果】
【0007】
実施形態の一態様によれば、自動走行を実行可能な作業車両を安価に提供することができる。
【図面の簡単な説明】
【0008】
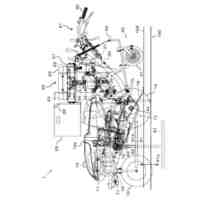
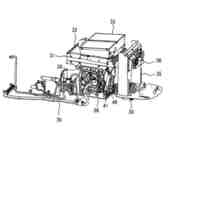
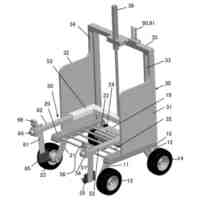
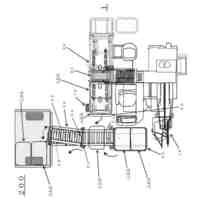
図1は、第1実施形態に係る作業車両を示す側面図である。
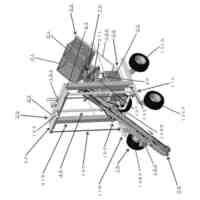
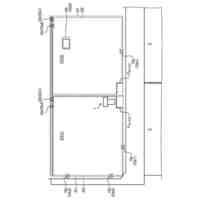
図2は、第1実施形態に係る作業車両を示す平面図である。
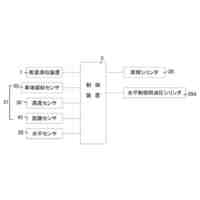
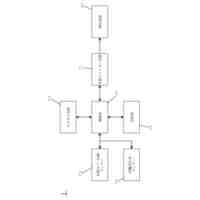
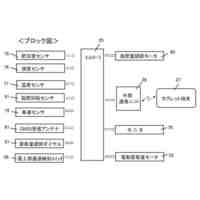
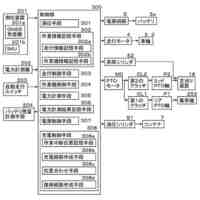
図3は、第1実施形態に係る苗移植機の制御装置を中心とした制御系を示すブロック図である。
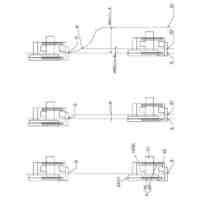
図4は、第1実施形態に係るティーチング走行による作業領域の設定方法を示す図である。
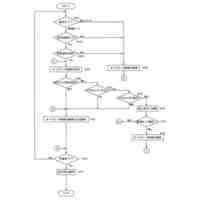
図5は、第1実施形態に係る自律走行制御を説明するフローチャートである。
図6は、第2実施形態に係る苗移植機を示す側面図である。
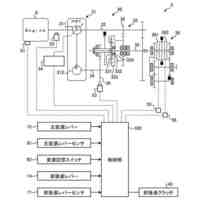
図7は、第2実施形態に係る苗移植機のコントローラを中心とした制御系を示すブロック図である。
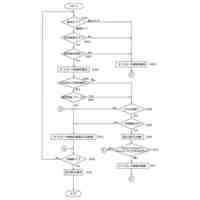
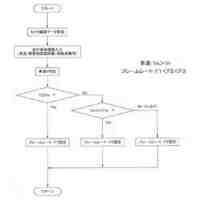
図8は、第2実施形態に係る自律走行制御を説明するフローチャートである。
【発明を実施するための形態】
【0009】
(第1実施形態)
まず、図1および図2を参照して第1実施形態に係る作業車両1の概要について説明する。図1は、第1実施形態に係る作業車両1を示す側面図である。図2は、第1実施形態に係る作業車両1を示す平面図である。
【0010】
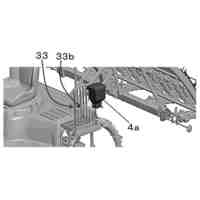
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、運転者が着座可能な運転席である操縦席41からハンドル35(ステアリング装置)に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
農作業車
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
今日
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
8日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
エンジン
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
屋外作業車
14日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
野菜収穫機
今日
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ