TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158797
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061679
出願日
2024-04-05
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01C
11/02 20060101AFI20251009BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】資材の消費量を正確に算出する作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、走行車体と、走行車体から動力が伝達されて駆動する作業装置と、作業装置を駆動させる伝達軸の回転数を検出する第1回転数センサと、作業装置の作業間隔を調整する調整装置と、調整装置の調整位置を検出する位置センサと、作業装置における資材使用量を算出する制御装置とを備える。制御装置は、作業装置における資材の供給口数、作業装置における資材当たりの供給回数、および、伝達軸の回転数と作業間隔と応じた作業回数に基づいて、資材使用量を算出する。
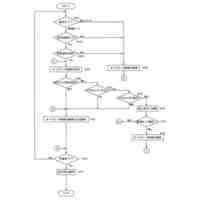
【選択図】図4
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体から動力が伝達されて駆動する作業装置と、
前記作業装置を駆動させる伝達軸の回転数を検出する第1回転数センサと、
前記作業装置の作業間隔を調整する調整装置と、
前記調整装置の調整位置を検出する位置センサと、
前記作業装置における資材使用量を算出する制御装置と
を備え、
前記制御装置は、前記作業装置における資材の供給口数、前記作業装置における資材当たりの供給回数、および、前記伝達軸の回転数と前記作業間隔と応じた作業回数に基づいて、前記資材使用量を算出する、作業車両。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記供給口数が減少された場合、前記供給口数の減少に対応する前記資材使用量を減算する、請求項1に記載の作業車両。
【請求項3】
前記供給回数の設定数を検出する設定センサ
を備え、
前記制御装置は、設定された前記供給回数に応じて、前記資材使用量を算出する、請求項1に記載の作業車両。
【請求項4】
前記走行車体の車輪の回転数を検出する第2回転数センサと、
前記作業装置への動力伝達状態を切り替えるクラッチと
を備え、
前記制御装置は、
前記伝達軸の回転数に基づいて、前記作業装置による第1作業面積を算出し、
前記車輪の回転数と、前記動力伝達状態とに基づいて、前記作業装置による第2作業面積を算出し、
前記第1作業面積と前記第2作業面積との差に基づいて、後輪への動力伝達状態を切り替える後輪クラッチにおけるスリップを検出する、請求項1に記載の作業車両。
【請求項5】
前記資材は、圃場に植える苗であり、
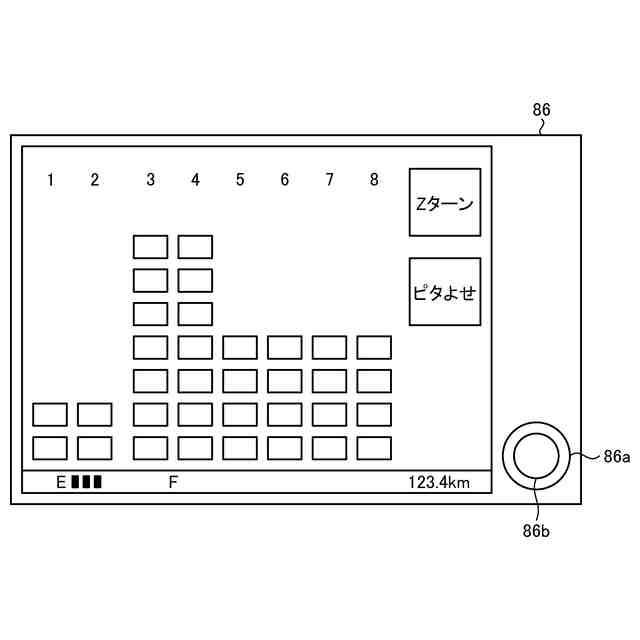
前記制御装置は、前記苗の残量をモニタに表示させ、
前記モニタには、横方向に前記作業装置における苗の条数、および、縦方向に前記苗の残量が表示される、請求項1に記載の作業車両。
【請求項6】
苗が補給され、苗が補給された条数の選択操作が行われた場合、前記モニタには、前記選択操作に応じて前記苗の残量が更新されて表示される、請求項5に記載の作業車両。
【請求項7】
前記作業装置の苗タンクに存在する苗の残量を検出する残量センサ
を備え、
前記残量センサは、前記苗までの距離を検出し、
前記残量センサは、苗が前記残量センサの上方にある場合には、前記苗タンクの苗載せ面よりも下方に位置し、苗が前記残量センサの上方にない場合には、前記苗載せ面よりも上方に突出する、請求項1に記載の作業車両。
【請求項8】
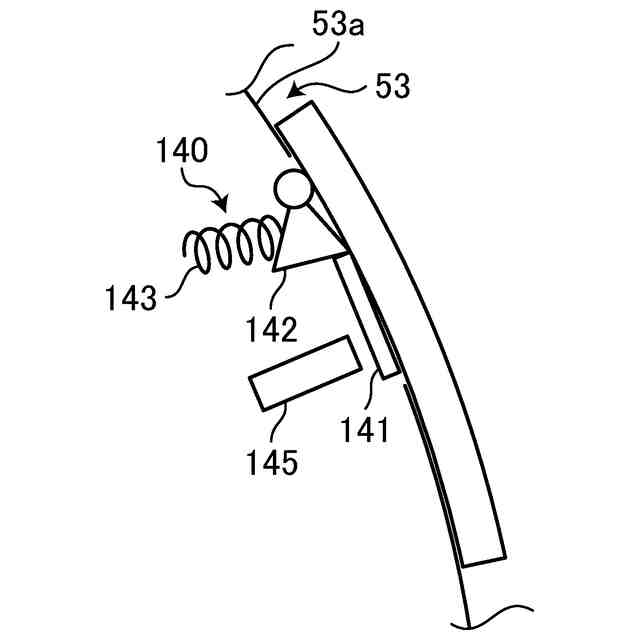
前記残量センサは、
センサ部と、
前記センサ部の上端側から前記苗載せ面に沿って下方に突出する押さえ板と、
前記センサ部を、前記苗載せ面よりも上方に押し出すように前記センサ部、および、前記押さえ板を付勢する付勢部と
を備え、
前記残量センサは、前記押さえ板の上面に苗がない場合に、前記苗載せ面よりも上方に突出する、請求項7に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、苗タンクに載置されたセンサによって検出された苗マットの数と、走行車体の走行距離に基づいて、苗の消費率を算出する作業車両が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-5748号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記する作業車両は、走行車体の走行状態、または、作業装置の作動状況によって苗などの資材の消費が変わった場合に、資材の消費量を正確に算出できないおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、資材の消費量を正確に算出する作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
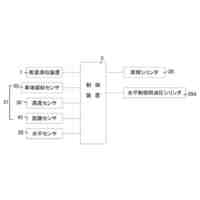
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、走行車体(2)と、走行車体(2)から動力が伝達されて駆動する作業装置(4)と、作業装置(4)を駆動させる伝達軸(67)の回転数を検出する第1回転数センサ(120)と、作業装置(4)の作業間隔を調整する調整装置(130)と、調整装置(130)の調整位置を検出する位置センサ(123)と、作業装置(4)における資材使用量を算出する制御装置(100)とを備える。制御装置(100)は、作業装置(4)における資材の供給口数、作業装置(4)における資材当たりの供給回数、および、伝達軸(67)の回転数と作業間隔と応じた作業回数に基づいて、資材使用量を算出する。
【発明の効果】
【0007】
実施形態の一態様によれば、資材の消費量を正確に算出することができる。
【図面の簡単な説明】
【0008】
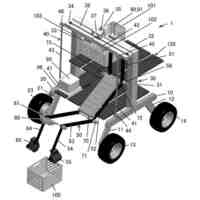
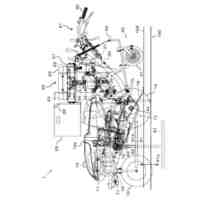
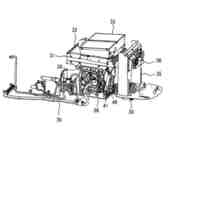
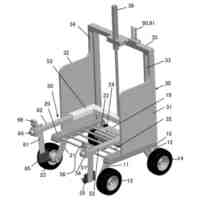
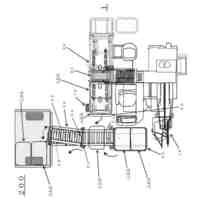
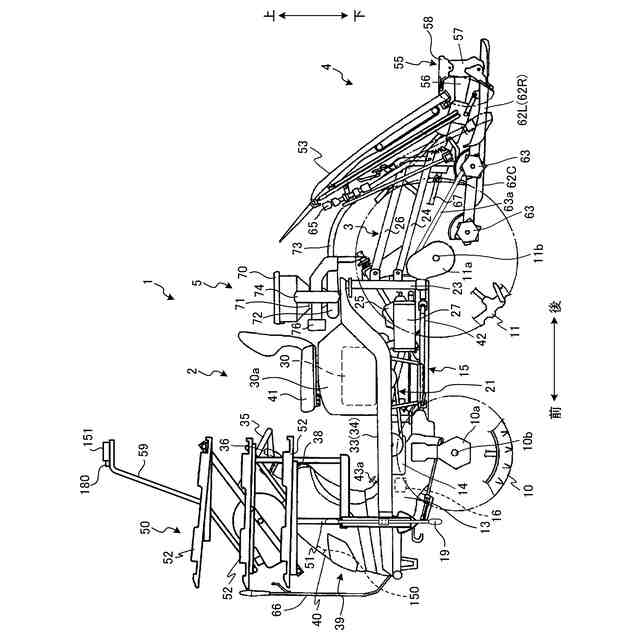
図1は、作業車両を示す側面図である。
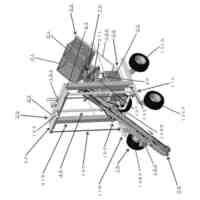
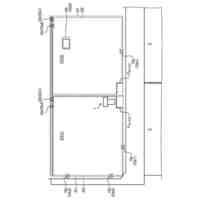
図2は、作業車両を示す平面図である。
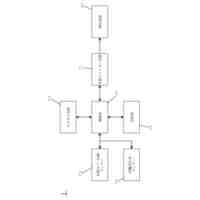
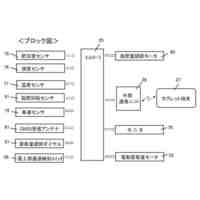
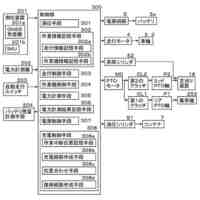
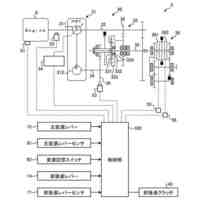
図3は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
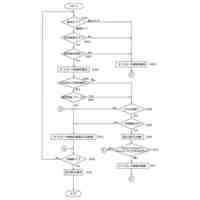
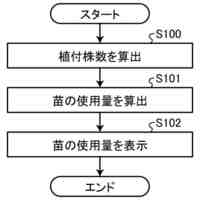
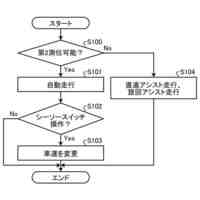
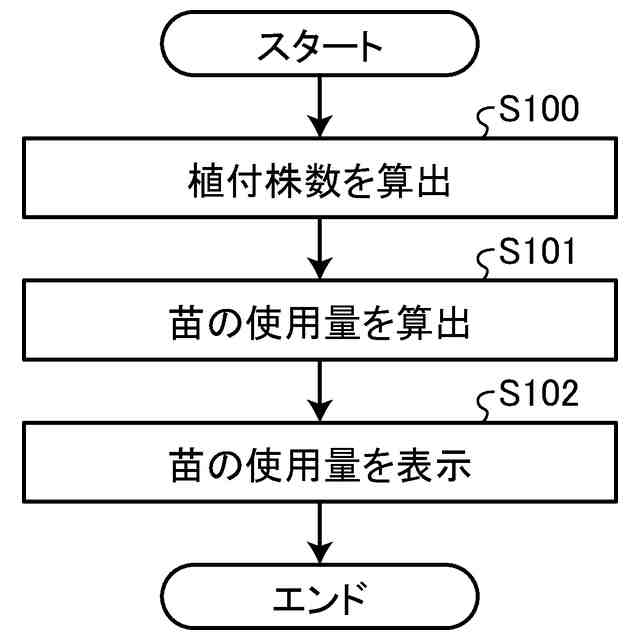
図4は、苗使用量算出処理を説明するフローチャートである。
図5は、苗の残量を示すモニタの表示例を示す図である。
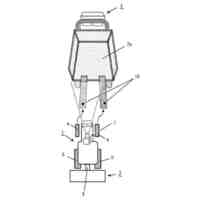
図6Aは、苗タンクに設けられた測距センサが苗載せ面の下方に位置する状態を示す図である。
図6Bは、苗タンクに設けられた測距センサが苗載せ面の上方に突出した状態を示す図である。
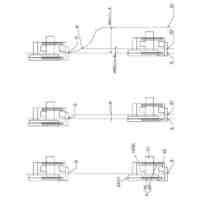
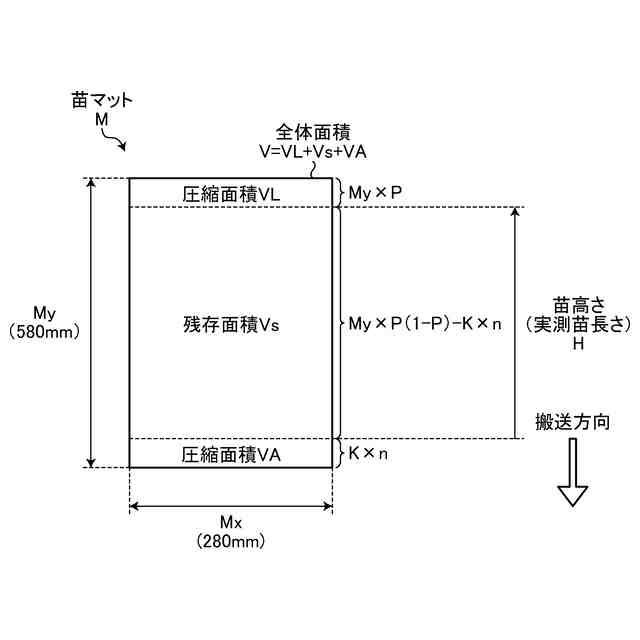
図7は、圧縮率算出に係る概念を説明するための説明図である。
図8は、圧縮率算出に係る概念を説明するための説明図である。
【発明を実施するための形態】
【0009】
まず、図1および図2を参照して実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からハンドル35(ステアリング装置)に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
2日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
農作業車
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
エンジン
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
電動芝刈機
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ