TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025169074
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024074060
出願日
2024-04-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
F16H
61/02 20060101AFI20251105BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】機体の変速速度を任意に変更すること。
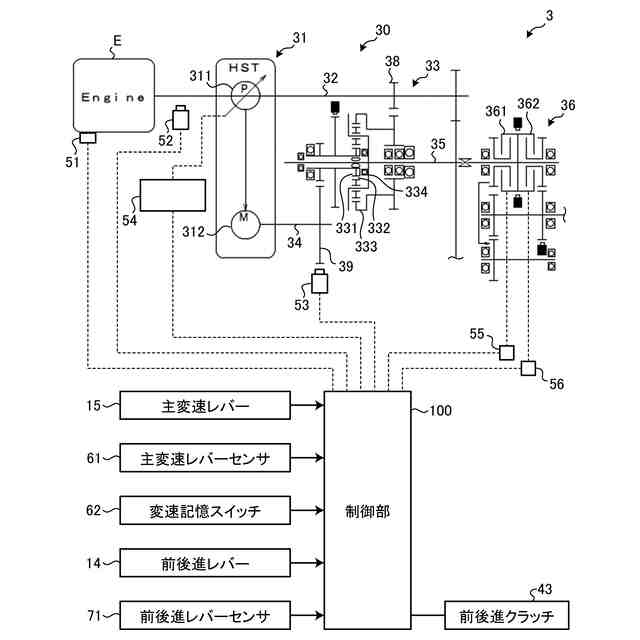
【解決手段】実施形態に係る作業車両は、機体を無段変速する主変速装置と、主変速装置を作動させる場合に、中立位置から増速側および減速側のいずれかへ傾倒操作される主変速レバーと、主変速レバーの傾倒角度を検出する主変速レバーセンサと、主変速レバーセンサによって検出された主変速レバーの傾倒角度に対応する変速指示値を主変速装置へ出力して機体を無段変速させる制御部とを備える。制御部は、傾倒操作された主変速レバーの傾倒角度に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能である。制御部は、主変速レバーの傾倒角度に応じて機体の変速速度を変化させる。
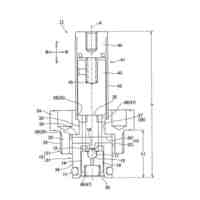
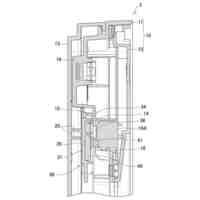
【選択図】図3
特許請求の範囲
【請求項1】
機体を無段変速する主変速装置と、
前記主変速装置を作動させる場合に、中立位置から増速側および減速側のいずれかへ傾倒操作される主変速レバーと、
前記主変速レバーの傾倒角度を検出する主変速レバーセンサと、
前記主変速レバーセンサによって検出された前記主変速レバーの傾倒角度に対応する変速指示値を前記主変速装置へ出力して機体を無段変速させる制御部と
を備え、
前記制御部は、
傾倒操作された前記主変速レバーの傾倒角度に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能であり、
前記主変速レバーの傾倒角度に応じて機体の変速速度を変化させる、作業車両。
続きを表示(約 410 文字)
【請求項2】
前記主変速レバーが傾倒操作された後、傾倒操作された前記主変速レバーが中立位置へ戻るように前記主変速レバーを付勢するレバー付勢装置
を備え、
前記レバー付勢装置は、
前記中立位置へ戻す方向に前記主変速レバーを付勢する第1付勢部材と、
傾倒操作された前記主変速レバーの傾倒角度が所定の角度以上になると前記中立位置へ戻す方向に前記主変速レバーを付勢する第2付勢部材とを有する、請求項1に記載の作業車両。
【請求項3】
前記制御部は、
機体の発進時においては前記主変速レバーが前記所定の角度を超えて傾倒操作されても機体の変速速度を変化させない、請求項2に記載の作業車両。
【請求項4】
前記制御部は、
前記主変速レバーが傾倒操作される場合、前記所定の角度を基準に段階的に機体の変速速度を変化させる、請求項3に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、作業車両において、無段変速装置を備え、無段階に機体変速するために主変速レバーが操作された場合に、主変速レバーの操作速度および操作量に応じて機体変速時の加速度および減速度を制御する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-298050号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術では、作業中にはエンジン回転数を固定して主変速によって車速を変更する農業用の作業車両の場合、機体の変速速度によって加速(増速)度が決まるが、この変速速度を任意に変更することはできない。
【0005】
本発明は、上記に鑑みてなされたものであって、機体の変速速度を任意に変更することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(1)は、機体を無段変速する主変速装置(30)と、前記主変速装置(30)を作動させる場合に、中立位置(P
N
)から増速側および減速側のいずれかへ傾倒操作される主変速レバー(15)と、前記主変速レバー(15)の傾倒角度を検出する主変速レバーセンサ(61)と、前記主変速レバーセンサ(61)によって検出された前記主変速レバー(15)の傾倒角度に対応する変速指示値を前記主変速装置(30)へ出力して機体を無段変速させる制御部(100)とを備え、前記制御部(100)は、傾倒操作された前記主変速レバー(15)の傾倒角度に対応する変速指示値を記憶し、記憶した変速指示値の走行速度で機体を定速走行させる定速走行制御を行うことが可能であり、前記主変速レバー(15)の傾倒角度に応じて機体の変速速度を変化させる。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、機体の変速速度を任意に変更することができる。
【図面の簡単な説明】
【0008】
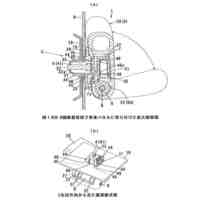
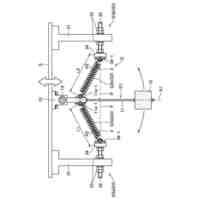
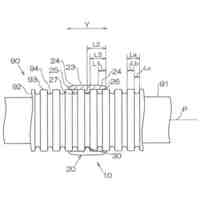
図1は、実施形態に係る作業車両を示す概略側面図である。
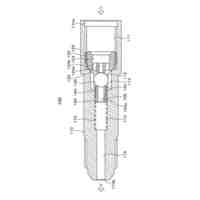
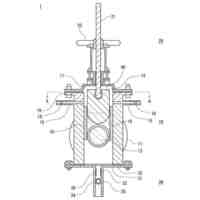
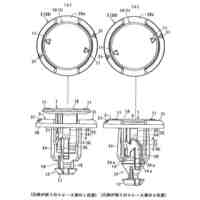
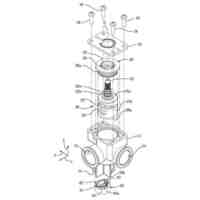
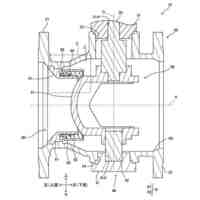
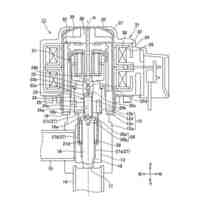
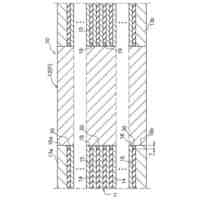
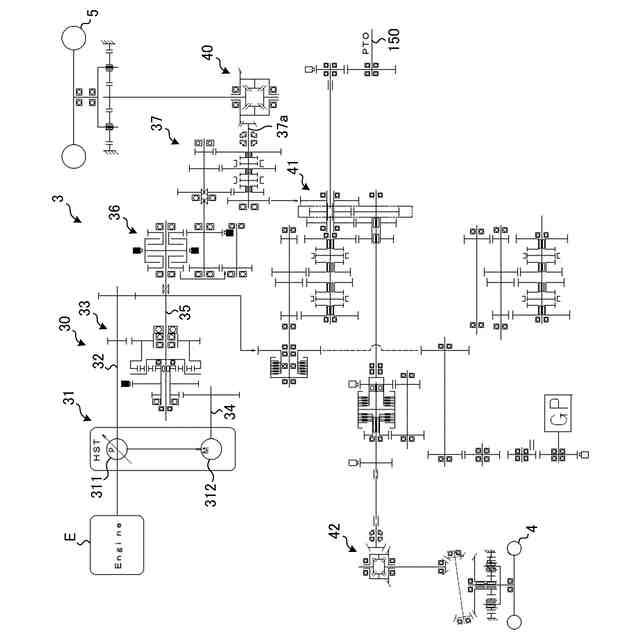
図2は、トランスミッションの構成を示す図(その1)である。
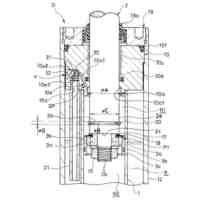
図3は、トランスミッションの構成を示す図(その2)である。
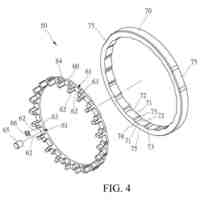
図4は、定速走行制御の説明図である。
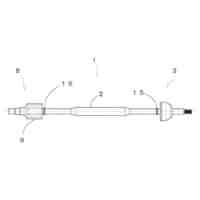
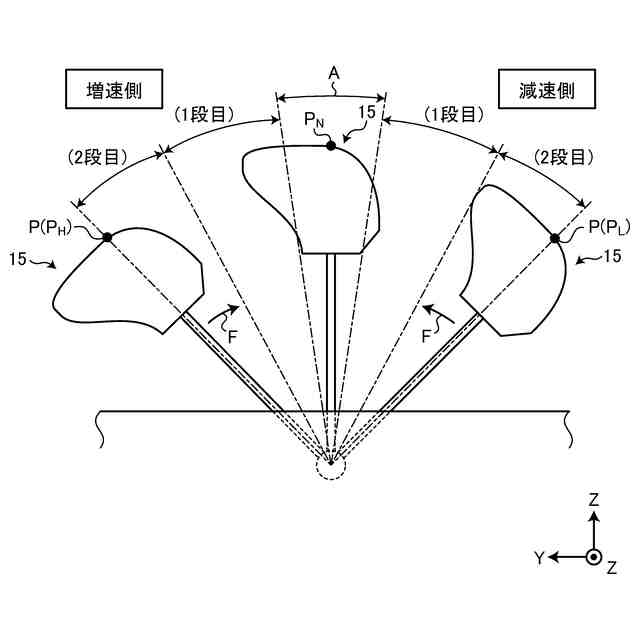
図5は、主変速レバーの操作位置を示す図である。
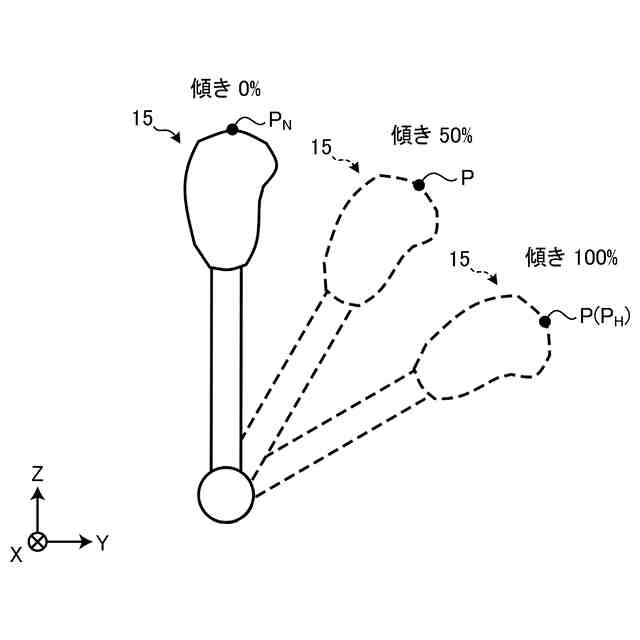
図6は、主変速レバーの操作量を示す図である。
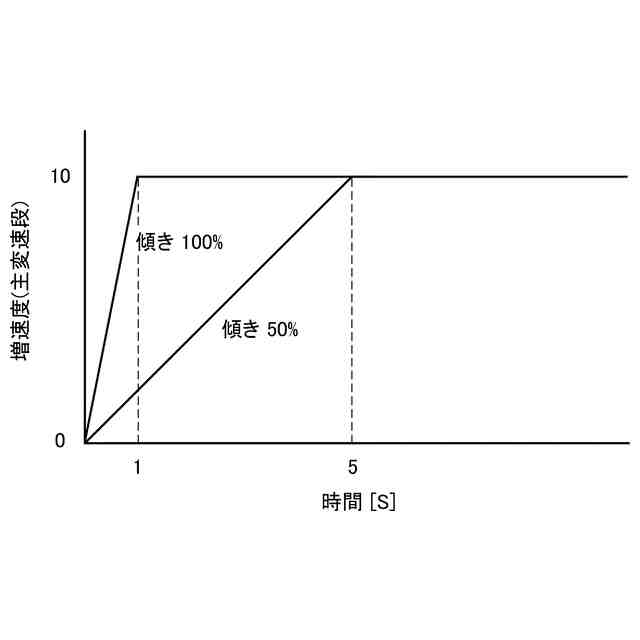
図7は、主変速レバーの操作量および操作時間と増減速の度合いとの関係を示す図である。
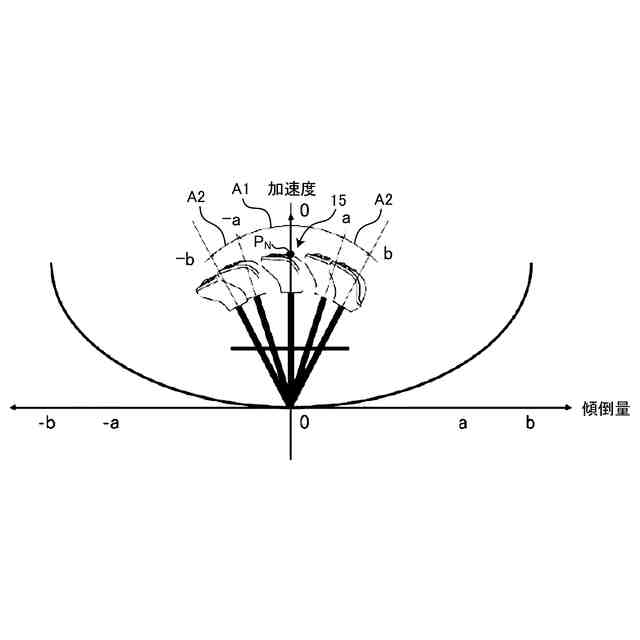
図8は、主変速レバーの操作量と加速度との関係を示す図である。
図9は、主変速レバーの第1領域を示す図である。
図10は、主変速レバーの第2領域を示す図である。
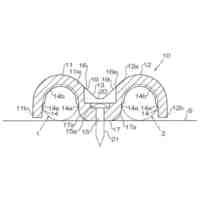
図11は、レバー付勢装置を示す斜視図(その1)である。
図12は、レバー付勢装置を示す斜視図(その2)である。
図13は、レバー付勢装置を示す斜視図(その3)である。
図14は、レバー付勢装置による付勢動作の説明図である。
図15は、変形例に係るレバー付勢装置を示す概略正面図である。
図16は、変形例に係るレバー付勢装置を示す一側方の概略側面図である。
図17は、変形例に係るレバー付勢装置を示す他側方の概略側面図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両の概要>
図1を参照して実施形態に係る作業車両1の概要について説明する。図1は、実施形態に係る作業車両1を示す概略側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
留め具
1か月前
個人
鍋虫ねじ
3か月前
個人
回転伝達機構
4か月前
個人
紛体用仕切弁
3か月前
個人
ジョイント
2か月前
個人
給排気装置
2か月前
個人
ナット
2か月前
個人
ナット
1か月前
個人
地震の揺れ回避装置
4か月前
個人
吐出量監視装置
3か月前
個人
ゲート弁バルブ
18日前
カヤバ株式会社
緩衝器
2か月前
兼工業株式会社
バルブ
1か月前
柿沼金属精機株式会社
分岐管
3か月前
株式会社ニフコ
クリップ
2か月前
株式会社ニフコ
クリップ
18日前
株式会社ノーリツ
分配弁
2か月前
株式会社タカギ
水栓装置
4か月前
アズビル株式会社
回転弁
2か月前
株式会社三五
ドライブシャフト
1か月前
株式会社奥村組
制振機構
2か月前
株式会社不二工機
電動弁
2か月前
竹内工業株式会社
ラッチ
3日前
株式会社不二工機
電磁弁
3か月前
株式会社奥村組
制振機構
2か月前
個人
ワンウェイベアリング
4か月前
株式会社オンダ製作所
識別リング
4か月前
株式会社ノナガセ
免震装置
1か月前
アマテイ株式会社
釘
1か月前
株式会社不二越
転がり軸受
3か月前
アイホン株式会社
電気機器
2か月前
株式会社ケアコム
取付器具
4か月前
株式会社有恒商会
伸縮継手
5か月前
個人
誘導電流活用式差動制限装置
2か月前
金子産業株式会社
筐体
19日前
株式会社オンダ製作所
長尺体保持具
5か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ