TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145951
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046478
出願日
2024-03-22
発明の名称
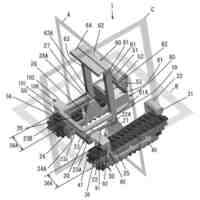
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250926BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】走行経路が予め登録された従来技術に比べて、自動走行時に電欠が発生することを抑制すること。
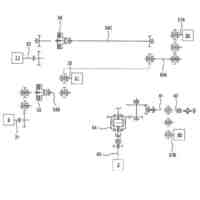
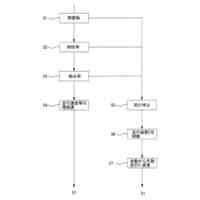
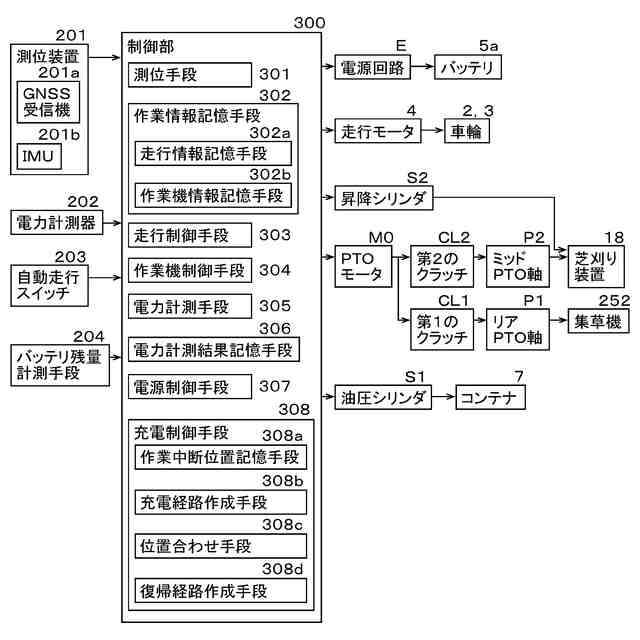
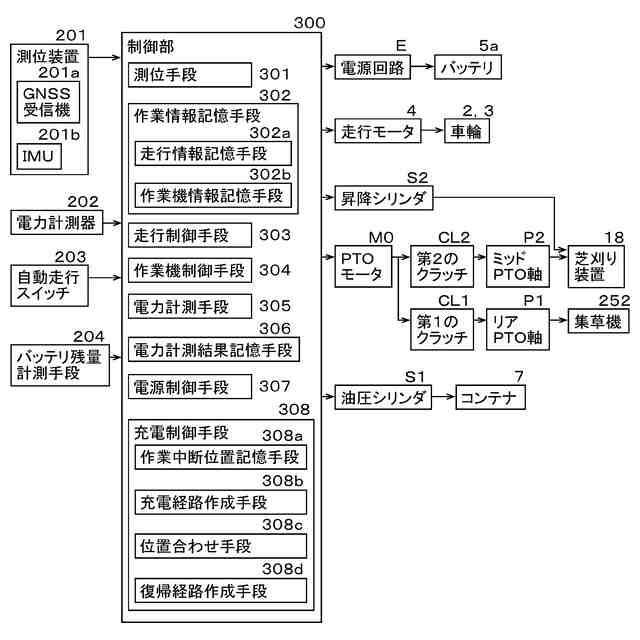
【解決手段】手動走行モードで走行しながら作業した際の電力測定器(202)の測定結果に基づいて、自動走行モードにおいて電動機(4,M0)の消費電力値と電力の変化率を制御部(300)が制御することで、圃場の実際の状況に応じた手動走行時の作業内容で、自動走行で作業を行うことができ、走行経路が予め登録された従来技術に比べて、自動走行時に電欠が発生することを抑制することができる。
【選択図】図2
特許請求の範囲
【請求項1】
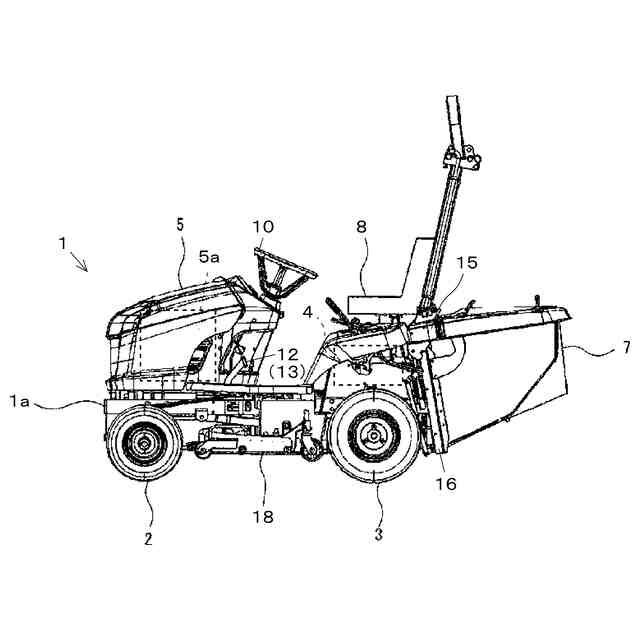
車両本体(1a)と、
前記車両本体(1a)に支持され、圃場での作業時に作動する作業機(18,7,252)と、
前記車両本体(1a)の走行装置(2,3)および前記作業機(18,7,252)を駆動する電動機(4,M0)と、
前記電動機(4,M0)における消費電力値と電力の変化率とを測定する電力測定器(202)と、
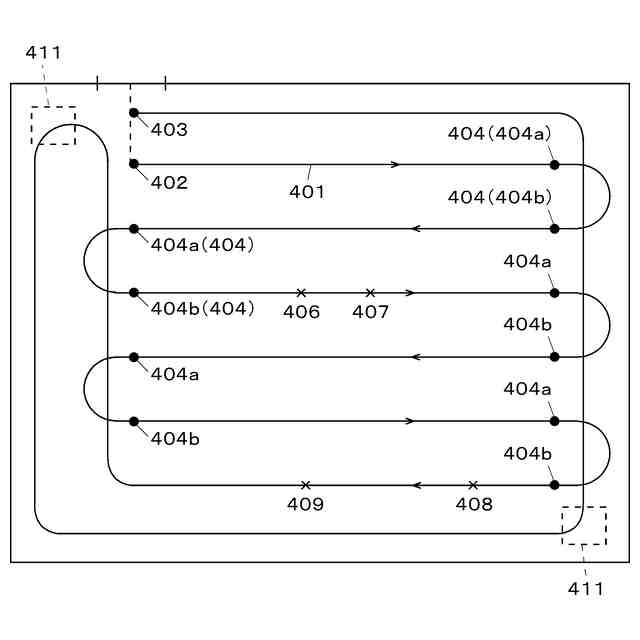
前記車両本体(1a)を予め定められた走行経路(401)に沿って自動走行させながら予め定められた前記作業機(18,7,252)の作業情報に基づいて前記作業機(18,7,252)を制御する自動走行モードと、作業者の操作に応じて前記車両本体(1a)を走行させながら前記作業機(18,7,252)を制御する手動走行モードとを切り替える制御部(300)であって、前記手動走行モードで走行しながら作業した際の前記電力測定器(202)の測定結果に基づいて、前記自動走行モードにおいて前記電動機(4,M0)の消費電力値と電力の変化率を制御する前記制御部(300)と、
を備えたことを特徴とする作業車両(1)。
続きを表示(約 950 文字)
【請求項2】
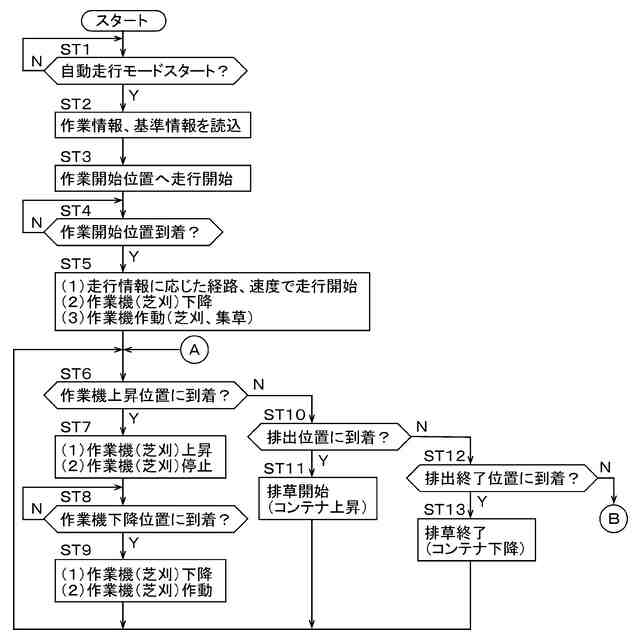
前記圃場の草の刈取作業を行う刈取装置(18)と、前記車両本体(1a)に支持され前記刈取装置(18)で刈り取られた草が収容される収容部(7)であって、草が収容可能な収容位置と、草を排出可能な排出位置との間で移動可能な前記収容部(7)と、を有する前記作業機(18,7)と、
前記車両本体(1a)の走行速度の情報を含む走行情報に基づいて自動走行させると共に、草の排出位置(408,409)の情報を含む作業機情報に基づいて前記収容部(7)を制御する前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記自動走行モードにおいて、前記電力測定器(202)での測定結果に基づいて、前記消費電力値および前記変化率の少なくとも一方が、予め定められた閾値に達した場合には、前記閾値に達しないように走行速度を低下させる前記制御部(300)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
前記車両本体(1a)に支持され、前記電動機(4,M0)に電力が蓄えられたバッテリ(5a)と、
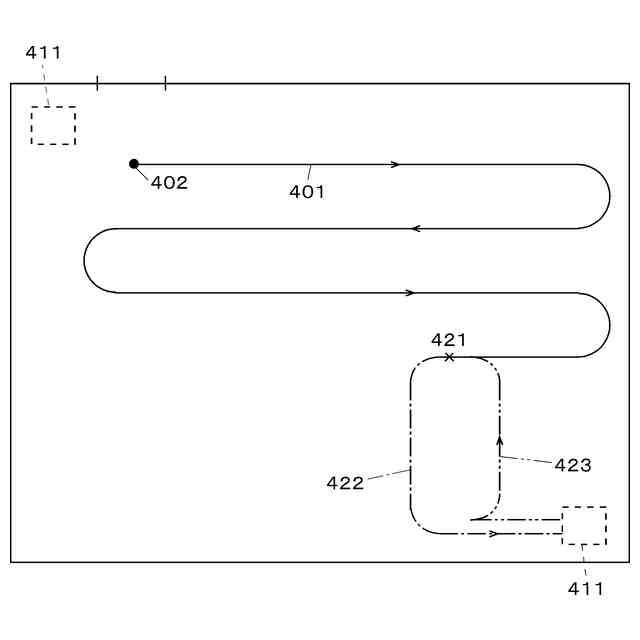
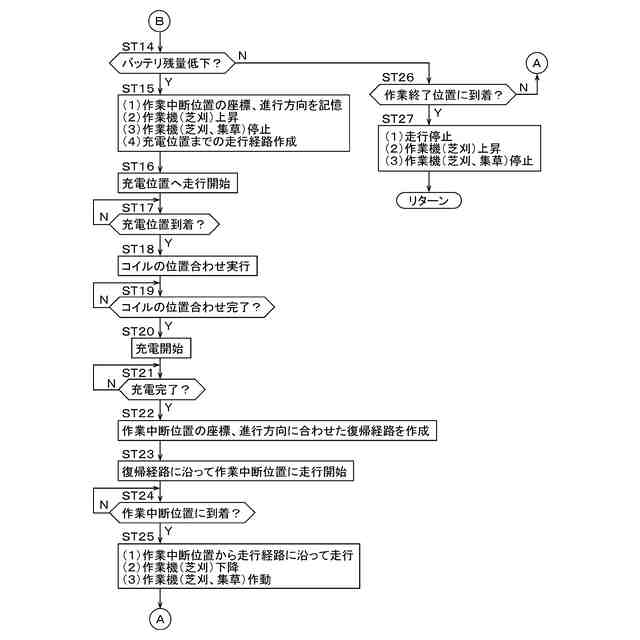
前記自動走行モードにおいて、前記圃場において前記バッテリ(5a)の充電が可能な充電位置(411)を含む走行情報に基づいて、前記バッテリ(5a)の残量が予め定められた値を下回る場合には、作業を中断して前記充電位置(411)に自動走行させて前記バッテリ(5a)の充電を行う経路を設定すると共に、充電完了後に、作業中断時の走行方向に前記車両本体(1a)の走行方向を合わせて作業が中断された位置に自動走行させる経路を設定する前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項5】
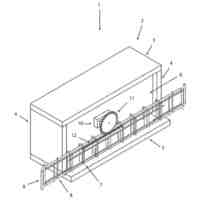
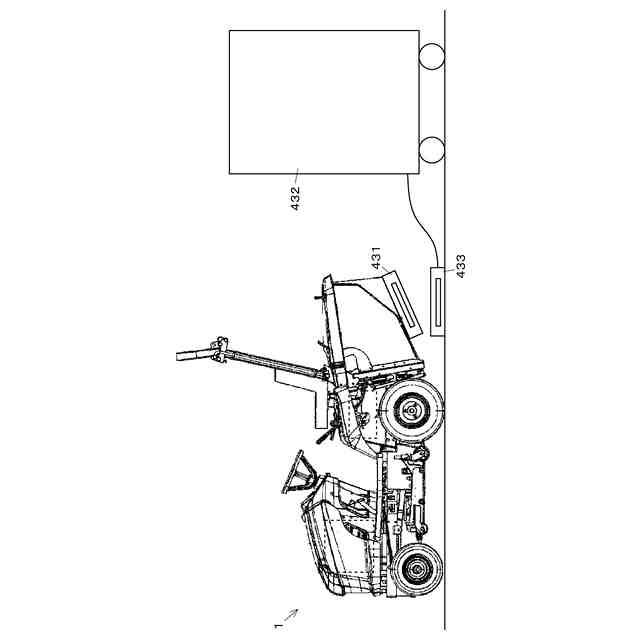
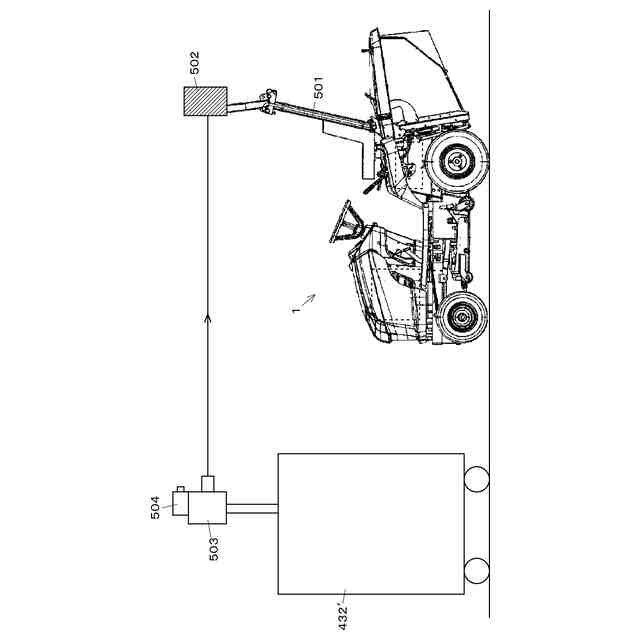
前記充電位置(411)に配置され且つ光で送電する光無線給電装置(503)から受電可能な受電器(502)であって、前記車両本体(1a)に支持された前記受電器(502)と、
前記受電器(502)が前記光無線給電装置(503)から受電可能な範囲では、充電しながら作業を行う前記制御部(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、走行装置や作業機を電動で駆動する作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
自律走行可能な作業車両において、走行経路が設定されており、バッテリ量によって、予め設定されている充電ステーションに移動するように走行経路を自動作成する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-27456号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、走行経路や充電ステーションの位置は予め登録されている。よって、設定された走行経路を走行する際に、有人走行時のように圃場の状態に応じた細やかな対応ができず、局所的な軟地盤等の圃場の状況に応じた負荷の変動に対応することが困難である。したがって、想定よりも早期にバッテリが不足して、いわゆる電欠が発生しやすい懸念がある。
【0005】
本発明は、走行経路が予め登録された従来技術に比べて、自動走行時に電欠が発生することを抑制することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車両本体(1a)と、前記車両本体(1a)に支持され、圃場での作業時に作動する作業機(18,7,252)と、前記車両本体(1a)の走行装置(2,3)および前記作業機(18,7,252)を駆動する電動機(4,M0)と、前記電動機(4,M0)における消費電力値と電力の変化率とを測定する電力測定器(202)と、前記車両本体(1a)を予め定められた走行経路(401)に沿って自動走行させながら予め定められた前記作業機(18,7,252)の作業情報に基づいて前記作業機(18,7,252)を制御する自動走行モードと、作業者の操作に応じて前記車両本体(1a)を走行させながら前記作業機(18,7,252)を制御する手動走行モードとを切り替える制御部(300)であって、前記手動走行モードで走行しながら作業した際の前記電力測定器(202)の測定結果に基づいて、前記自動走行モードにおいて前記電動機(4,M0)の消費電力値と電力の変化率を制御する前記制御部(300)と、を備えたことを特徴とする作業車両(1)である。
【0007】
請求項2に記載の発明は、前記圃場の草の刈取作業を行う刈取装置(18)と、前記車両本体(1a)に支持され前記刈取装置(18)で刈り取られた草が収容される収容部(7)であって、草が収容可能な収容位置と、草を排出可能な排出位置との間で移動可能な前記収容部(7)と、を有する前記作業機(18,7)と、前記車両本体(1a)の走行速度の情報を含む走行情報に基づいて自動走行させると共に、草の排出位置(408,409)の情報を含む作業機情報に基づいて前記収容部(7)を制御する前記制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記自動走行モードにおいて、前記電力測定器(202)での測定結果に基づいて、前記消費電力値および前記変化率の少なくとも一方が、予め定められた閾値に達した場合には、前記閾値に達しないように走行速度を低下させる前記制御部(300)を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記車両本体(1a)に支持され、前記電動機(4,M0)に電力が蓄えられたバッテリ(5a)と、前記自動走行モードにおいて、前記圃場において前記バッテリ(5a)の充電が可能な充電位置(411)を含む走行情報に基づいて、前記バッテリ(5a)の残量が予め定められた値を下回る場合には、作業を中断して前記充電位置(411)に自動走行させて前記バッテリ(5a)の充電を行う経路を設定すると共に、充電完了後に、作業中断時の走行方向に前記車両本体(1a)の走行方向を合わせて作業が中断された位置に自動走行させる経路を設定する前記制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記充電位置(411)に配置され且つ光で送電する光無線給電装置(503)から受電可能な受電器(502)であって、前記車両本体(1a)に支持された前記受電器(502)と、前記受電器(502)が前記光無線給電装置(503)から受電可能な範囲では、充電しながら作業を行う前記制御部(300)と、を備えたことを特徴とする請求項4に記載の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
2日前
井関農機株式会社
苗移植機
2日前
井関農機株式会社
コンバイン
今日
井関農機株式会社
圃場作業機
6日前
井関農機株式会社
野菜収穫機
13日前
井関農機株式会社
収穫作業車両
7日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
コンバイン
6日前
個人
産卵床
13日前
個人
平板植栽
14日前
個人
釣り用錘
1か月前
個人
噴霧器ノズル
29日前
個人
蜜蜂保護装置
1か月前
個人
果実袋
13日前
個人
養殖器具
13日前
個人
ビニール鉢名札
今日
個人
移動体草刈り機
13日前
個人
水田排水量調整器具
13日前
個人
ペット用給餌マット
今日
株式会社剛樹
釣り竿
27日前
個人
可動リップ付きルアー
1か月前
個人
餌付き針の餌取り防止具
1か月前
個人
アリ侵入防止装置
今日
井関農機株式会社
圃場作業機
1か月前
株式会社ナベル
表示システム
1か月前
個人
ブルーカーボンシステム
1か月前
井関農機株式会社
圃場作業機
6日前
有限会社信英精密
括り罠
21日前
積水樹脂株式会社
シート止め具
13日前
株式会社サワエ
害虫捕獲器
6日前
株式会社シマノ
釣糸ガイド
今日
井関農機株式会社
苗移植機
21日前
松山株式会社
収穫機
1か月前
みのる産業株式会社
除草機
1か月前
みのる産業株式会社
除草機
1か月前
松山株式会社
収穫機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ