TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159625
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062344
出願日
2024-04-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20251014BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来技術に比べて、作業車両の安全性を向上させること。
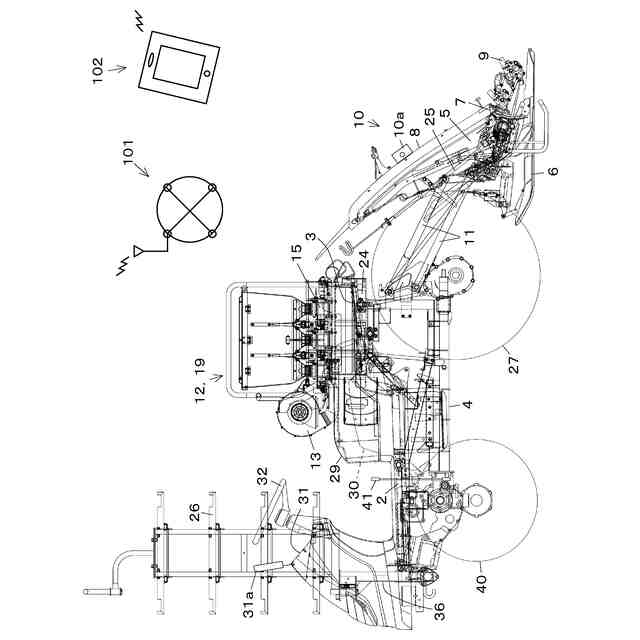
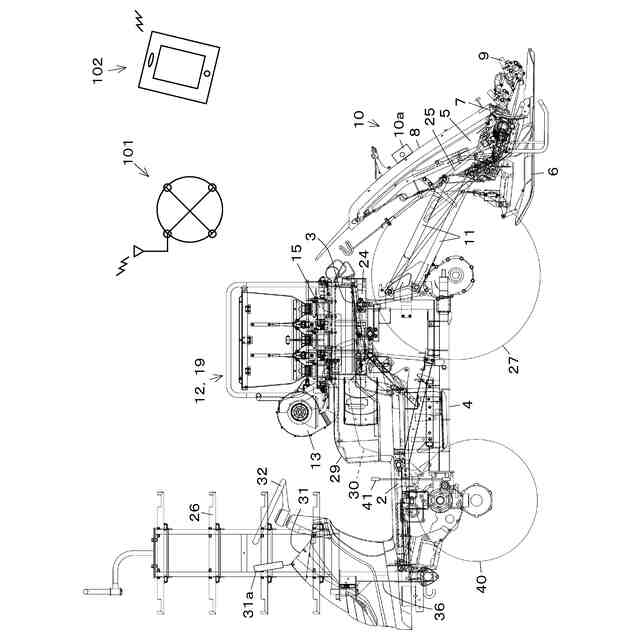
【解決手段】自動走行モード時に車体(4)の走行の異常を検知した場合には、乗車検知部材(SN4)の検知結果に関わらず自動走行モードから手動走行モードに切り替え、自動走行モード時に前記車体(4)の走行の異常を検知した場合に作業者が搭乗している場合には走行操作具(33)の操作位置に関わらず走行を停止させることで、従来技術に比べて、作業車両の安全性を向上させることができる。
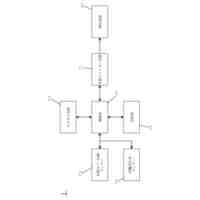
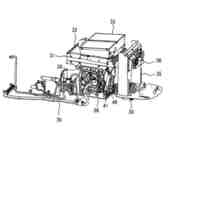
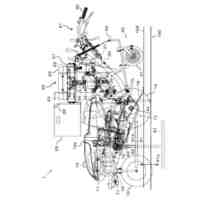
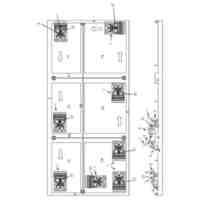
【選択図】図1
特許請求の範囲
【請求項1】
車体(4)と、
前記車体(4)の走行の操作を行う走行操作具(33)と、
作業者の前記車体(4)への搭乗を検知する乗車検知部材(SN4)と、
前記走行操作具(33)の操作に応じて前記車体(4)を走行させる手動走行モードと、前記走行操作具(33)の操作に関わらず前記車体(4)を走行させる自動走行モードと、を切り替える制御手段(300)と、
を備え、
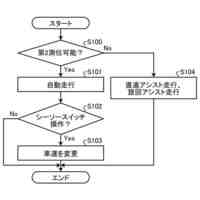
前記制御手段(300)は、走行が停止される中立位置に前記走行操作具(33)が操作され且つ前記乗車検知部材(SN4)が作業者を非検知の場合に前記手動走行モードから前記自動走行モードへの切り替えを行うとともに、
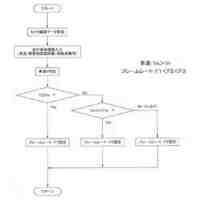
前記自動走行モード時に前記車体(4)の走行の異常を検知した場合には、前記乗車検知部材(SN4)の検知結果に関わらず前記自動走行モードから前記手動走行モードに切り替え、
前記自動走行モード時に前記車体(4)の走行の異常を検知した場合に、前記作業者が搭乗している場合には前記走行操作具(33)の操作位置に関わらず走行を停止させる、
ことを特徴とする作業車両。
続きを表示(約 1,800 文字)
【請求項2】
前記乗車検知部材(SN4)が作業者を検知した状態で前記手動走行モードから前記自動走行モードに切り替え可能であると共に、前記自動走行モード中に前記走行操作具(33)で前記車体(4)の発進と停止の操作が可能である
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記車体(4)の走行の異常が検知されて前記手動走行モードに切り替わった場合に、前記車体(4)が減速しない場合に、エンジン(30)を停止させる前記制御手段(300)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
前記車体(4)を走行させる動力を発生させるエンジン(30)と、
前記エンジン(30)の動力を変速させる変速装置(HST)と、
前記車体(4)の走行の異常が検知されて前記手動走行モードに切り替わった場合に、前記変速装置(HST)から動力が伝達されない中立状態に前記変速装置(HST)を制御するとともに、前記中立状態に制御した後に前記車体(4)が減速しない場合に、前記エンジン(30)を停止させる前記制御手段(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項5】
前記変速装置(HST)の制御量を検知する変速検知部材(SN2)と、
前記車体(4)の走行の異常が検知されて前記手動走行モードに切り替わった場合に、前記変速装置(HST)が前記中立状態に制御されても、前記変速検知部材(SN2)の検知結果が前記中立状態を検知しない場合には、前記エンジン(30)を停止させる前記制御手段(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項6】
前記変速装置(HST)の制御量を検知する変速検知部材(SN2)と、
前記変速装置(HST)を強制的に前記中立状態に戻す操作を行う中立復帰部材と、
前記中立復帰部材が操作されて、前記変速装置(HST)が前記中立状態に戻す制御がされても、前記変速検知部材(SN2)の検知結果が前記中立状態を検知しない場合には、前記エンジン(30)を停止させる前記制御手段(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項7】
前記車体(4)を走行させる動力を発生させるエンジン(30)と、
前記エンジン(30)の動力を変速させる変速装置(HST)と、
前記車体(4)の走行を遠隔操作する遠隔操作部材(102)と、
前記車体(4)の傾斜を検知する傾斜検知部材(111b)と、
前記遠隔操作部材(102)により前記エンジン(30)の停止の操作がされた場合に、前記傾斜検知部材(111b)が予め定められた傾斜角に達する傾斜を検知している場合には、前記エンジン(30)を停止せず、前記変速装置(HST)から動力が伝達されない中立状態に前記変速装置(HST)を制御する前記制御手段(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項8】
前記車体(4)の現在位置を測位する測位装置(111)と、
前記測位装置(111)で計測された前記車体(4)の現在位置に基づいて、圃場(400)の外縁から予め定められた距離外側にずれた位置に前記車体(4)がある場合に、前記遠隔操作部材(102)により前記エンジン(30)の停止の操作がされた場合には、前記エンジン(30)を停止させない前記制御手段(300)と、
を備えたことを特徴とする請求項7に記載の作業車両。
【請求項9】
前記遠隔操作部材(102)において予め定められたエンジン強制停止操作がされた場合には、前記エンジン(30)を停止させる前記制御手段(300)、
を備えたことを特徴とする請求項8に記載の作業車両。
【請求項10】
前記エンジン(30)が停止した状態で、前記遠隔操作部材(102)において予め定められたエンジン強制始動操作がされた場合には、前記エンジン(30)を始動させる前記制御手段(300)、
を備えたことを特徴とする請求項8または9に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、田植機やトラクタ等の作業を行う作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
田植機やトラクタ等の作業車両において、作業者の操作に応じて走行中の負荷等でHSTクラッチのクラッチ外れ(クラッチ抜け)が発生したと判別された場合に、エンジンを停止させる技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-133833号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、手動走行中に異常が検知された場合に、エンジンを停止させることで、作業車両の誤作動や暴走等を防止し、事故を抑制している。近年、完全に無人で自動走行する作業車両(ロボット車両)や、作業者が搭乗しながら走行は自動で行う作業車両が開発されている。
無人の場合は、自動走行中に異常を検知した場合に、エンジンを停止させても問題は少ない。しかしながら、有人の場合(作業者が搭乗している場合)は、自動走行中の異常検知時に即座にエンジンを停止させると、急減速、急停止することとなり、作業者が立ち上がっていると転倒する事故等が発生する恐れがある。よって、従来技術では、有人の場合は、自動走行モードを手動走行モードに切り替えるだけで、エンジンを停止させていなかった。
【0005】
ここで、有人の自動走行では、発進と停止は、作業者が自身で走行操作具を操作することで転倒事故を防止していた。したがって、有人での自動走行の開始時には、走行操作具が発進位置に操作されており、発進後に作業者が中立位置に戻し忘れることも多い。よって、走行操作具は発進位置に操作されたままの状態で異常が発生して手動走行モードに戻ると、作業車両は、走行操作具の操作位置に応じて、発進位置での走行を行うこととなる。よって、有人での自動走行中に、異常が発生したにも関わらず作業車両が停止せず、暴走等の事故が発生したり、停止まで時間がかかったり、走行操作具の操作位置によっては手動走行モード切換え直後に急加速または急減速する恐れもあった。
【0006】
本発明は、従来技術に比べて、作業車両の安全性を向上させることを技術的課題とする。
【課題を解決するための手段】
【0007】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車体(4)と、前記車体(4)の走行の操作を行う走行操作具(33)と、作業者の前記車体(4)への搭乗を検知する乗車検知部材(SN4)と、前記走行操作具(33)の操作に応じて前記車体(4)を走行させる手動走行モードと、前記走行操作具(33)の操作に関わらず前記車体(4)を走行させる自動走行モードと、を切り替える制御手段(300)と、を備え、前記制御手段(300)は、走行が停止される中立位置に前記走行操作具(33)が操作され且つ前記乗車検知部材(SN4)が作業者を非検知の場合に前記手動走行モードから前記自動走行モードへの切り替えを行うとともに、前記自動走行モード時に前記車体(4)の走行の異常を検知した場合には、前記乗車検知部材(SN4)の検知結果に関わらず前記自動走行モードから前記手動走行モードに切り替え、前記自動走行モード時に前記車体(4)の走行の異常を検知した場合に、前記作業者が搭乗している場合には前記走行操作具(33)の操作位置に関わらず走行を停止させる、ことを特徴とする作業車両である。
【0008】
請求項2に記載の発明は、前記乗車検知部材(SN4)が作業者を検知した状態で前記手動走行モードから前記自動走行モードに切り替え可能であると共に、前記自動走行モード中に前記走行操作具(33)で前記車体(4)の発進と停止の操作が可能であることを特徴とする請求項1に記載の作業車両である。
【0009】
請求項3に記載の発明は、前記車体(4)の走行の異常が検知されて前記手動走行モードに切り替わった場合に、前記車体(4)が減速しない場合に、エンジン(30)を停止させる前記制御手段(300)を備えたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項4に記載の発明は、前記車体(4)を走行させる動力を発生させるエンジン(30)と、前記エンジン(30)の動力を変速させる変速装置(HST)と、前記車体(4)の走行の異常が検知されて前記手動走行モードに切り替わった場合に、前記変速装置(HST)から動力が伝達されない中立状態に前記変速装置(HST)を制御するとともに、前記中立状態に制御した後に前記車体(4)が減速しない場合に、前記エンジン(30)を停止させる前記制御手段(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
農作業機
8日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
苗移植機
16日前
井関農機株式会社
エンジン
16日前
井関農機株式会社
圃場作業機
1日前
井関農機株式会社
圃場作業機
29日前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
電動芝刈機
10日前
井関農機株式会社
屋外作業車
22日前
井関農機株式会社
野菜収穫機
8日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
根菜類収穫機
1か月前
井関農機株式会社
収穫作業車両
2日前
井関農機株式会社
乗用型苗植機
29日前
井関農機株式会社
自動精米洗米炊飯機
29日前
井関農機株式会社
乗用作業車の操縦装置
29日前
井関農機株式会社
エンドエフェクターおよび作業車両
17日前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ