TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152094
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053831
出願日
2024-03-28
発明の名称
歩行型耕運機
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
33/16 20060101AFI20251002BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】本発明は、作業者が機体の後側を追従歩行しながら耕耘作業を行う歩行型耕運機において、機体が作業者の予測していない動きをすることで危険な状態になるのを防ぐことを課題とする。
【解決手段】
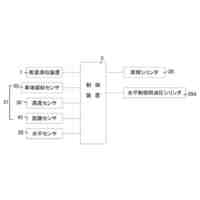
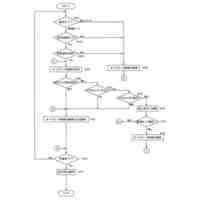
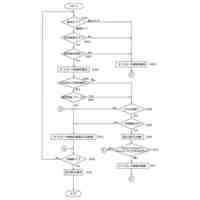
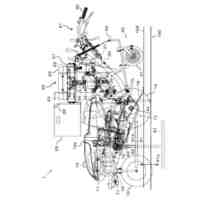
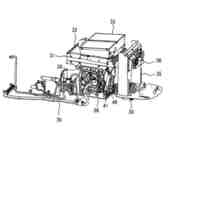
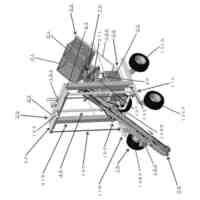
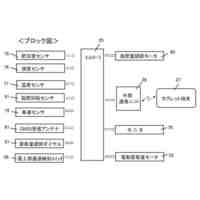
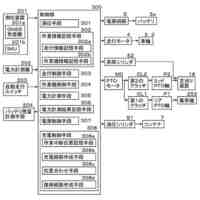
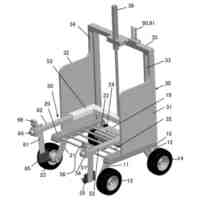
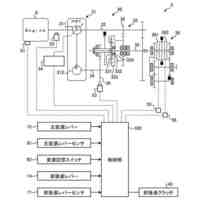
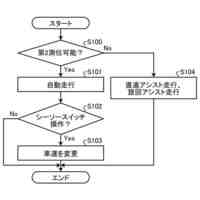
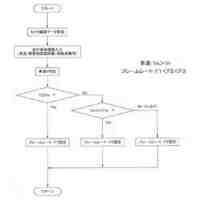
機体の下部に耕耘爪8を設け、機体後方に向けて設ける操縦ハンドル3を握って操縦する歩行型耕運機において、機体の走行に伴って接地して回転する尾輪11の回転を検出する走行センサ10を設け、該走行センサ10の検出する回転数から走行速度を算出し、前進作業時に通常の作業速度を超える速度変化或いは後進を検出すると走行停止制御或いはエンジン停止制御を行うことを特徴とする歩行型耕運機とする。
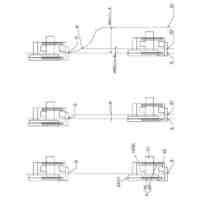
【選択図】図3
特許請求の範囲
【請求項1】
機体の下部に耕耘爪(8)を設け、機体後方に向けて設ける操縦ハンドル(3)を握って操縦する歩行型耕運機において、機体の走行に伴って接地して回転する尾輪(11)の回転を検出する走行センサ(10)を設け、該走行センサ(10)の検出する回転数から走行速度を算出し、前進作業時に通常の作業速度を超える速度変化或いは後進を検出すると走行停止制御或いはエンジン停止制御を行うことを特徴とする歩行型耕運機。
続きを表示(約 550 文字)
【請求項2】
走行クラッチ(27)の切かスロットルレバー(5)の最低速位置か変速レバー(14)の中立かのいずれかでエンジン(15)を起動可能にしたことを特徴とする請求項1に記載の歩行型耕運機。
【請求項3】
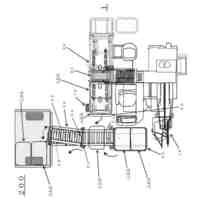
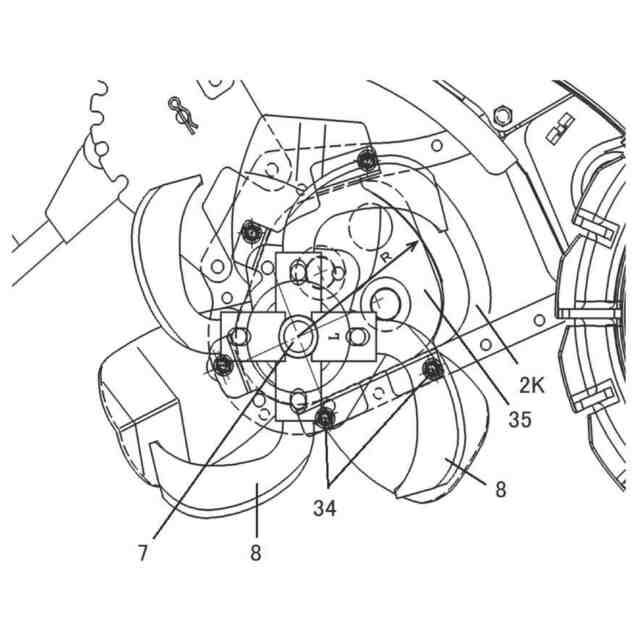
機体の下部に設ける走行輪(1)より前側にバッテリ(17)とオルタネータ(16)を配置し、機体後部に耕耘爪(8)を軸支する耕耘軸(7)を設け、機体の前後方向に移動するバランスウエイト(20)を設けた請求項1または請求項2に記載の歩行型耕運機。
【請求項4】
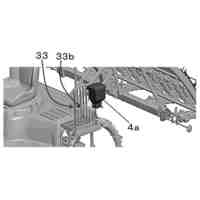
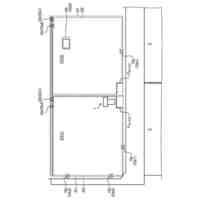
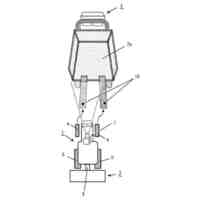
機体の前後方向に設けるスライドレール(28)の駆動具(29)に前後一対のスライドピン(26)で係合するバランスウエイト(20)を設け、駆動具(29)に係合して前後にスライドする電動モータ(21)を設け、該電動モータ(21)の駆動を制御するモータ制御スイッチ(6)を操縦ハンドル(3)に設けた請求項3に記載の歩行型耕運機。
【請求項5】
バランスウエイト20の前後移動を検出する前後センサ23,24を設け、前センサ23のバランスウエイト検出で耕耘クラッチ13を切り後センサ24のバランスウエイト検出で耕耘クラッチ13を入りにすることを特徴とする請求項4に記載の歩行型耕運機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業者が機体後部に設ける走行ハンドルを操作しながら追従歩行し耕耘作業を行う歩行型耕運機に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
歩行型耕運機は、特許第5880680号公報に記載の如く、耕耘爪を設けた機体の後方に向けて設けた操作ハンドルを作業者が持って、機体の後部を追従歩行しながら耕耘爪を回転させて耕耘・畝立等の作業を行う。
【先行技術文献】
【特許文献】
【0003】
特許第5880680号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
歩行型耕運機は、機体後部を歩行する作業者が耕耘深さや走行速度を調節しながら操縦操作を行っているが、耕地が部分的に硬かったり岩石が耕地中にあると、高速回転する耕耘爪によって機体が急激に前進(ダッシング)したり急激に後進(キックバック)したりすることがあるので作業者は充分な注意を払って操縦しなければならない。
【0005】
本発明は、作業者が機体の後側を追従歩行しながら耕耘作業を行う歩行型耕運機において、機体が作業者の予測していない動きをすることで危険な状態になることを防ぐことを課題とする。
【課題を解決するための手段】
【0006】
上記本発明の課題は、次の技術手段により解決される。
【0007】
請求項1の発明は、機体の下部に耕耘爪8を設け、機体後方に向けて設ける操縦ハンドル3を握って操縦する歩行型耕運機において、機体の走行に伴って接地して回転する尾輪11の回転を検出する走行センサ10を設け、該走行センサ10の検出する回転数から走行速度を算出し、前進作業時に通常の作業速度を超える速度変化或いは後進を検出すると走行停止制御或いはエンジン停止制御を行うことを特徴とする歩行型耕運機とする。
【0008】
請求項2の発明は、走行クラッチ27の切かスロットルレバー5の最低速位置か変速レバー14の中立かのいずれかでエンジン15を起動可能にしたことを特徴とする請求項1に記載の歩行型耕運機とする。
【0009】
請求項3の発明は、機体の下部に設ける走行輪1より前側にバッテリ17とオルタネータ16を配置し、機体後部に耕耘爪8を軸支する耕耘軸7を設け、機体の前後方向に移動するバランスウエイト20を設けた請求項1または請求項2に記載の歩行型耕運機とする。
【0010】
請求項4の発明は、機体の前後方向に設けるスライドレール28の駆動具29に前後一対のスライドピン26で係合するバランスウエイト20を設け、駆動具29に係合して前後にスライドする電動モータ21を設け、該電動モータ21の駆動を制御するモータ制御スイッチ6を操縦ハンドル3に設けた請求項3に記載の歩行型耕運機とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
農作業車
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
エンジン
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
屋外作業車
15日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
野菜収穫機
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ