TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129632
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026391
出願日
2024-02-26
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01B
63/102 20060101AFI20250829BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】容易に畦際まで耕耘することができる作業車両を提供する。
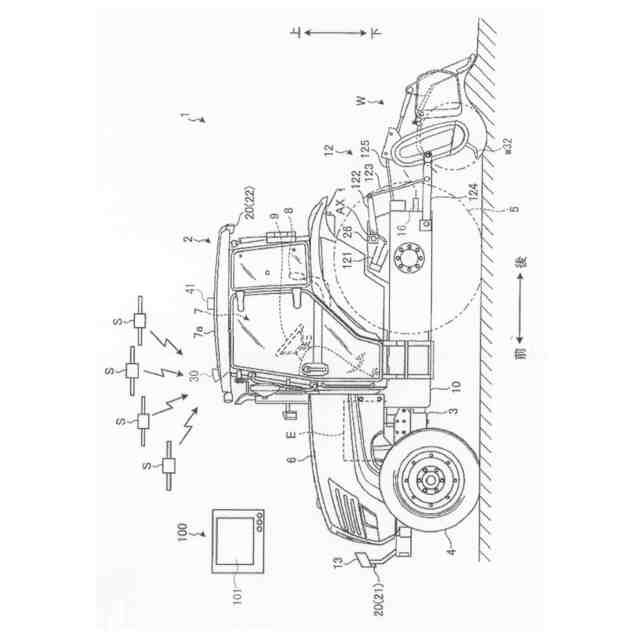
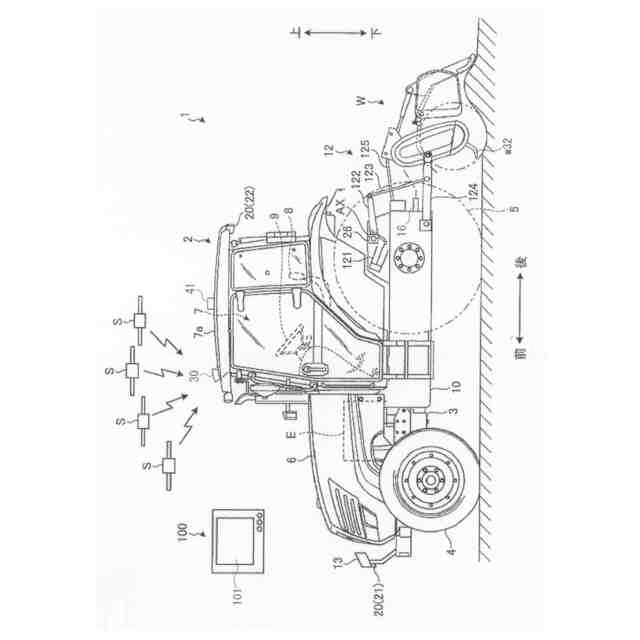
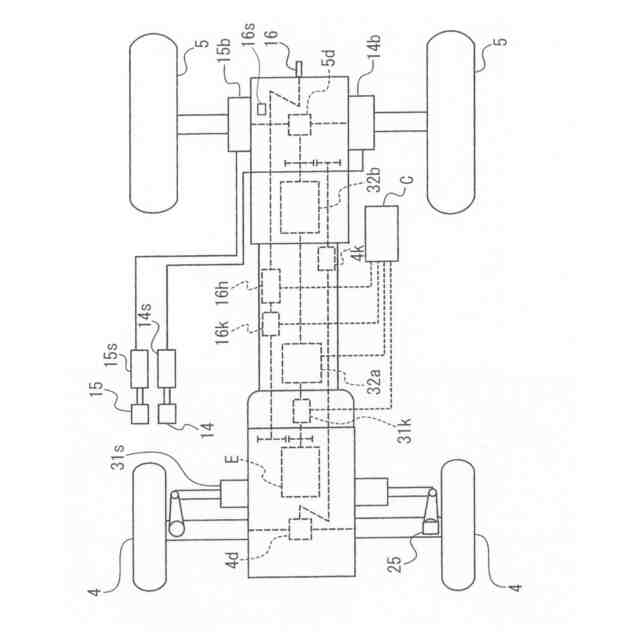
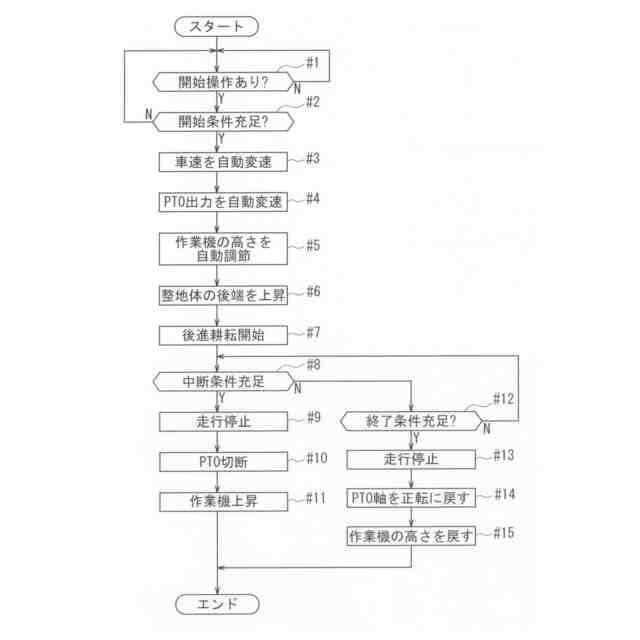
【解決手段】耕耘機Wを駆動するPTO軸の回転動力を、正転または逆転に切り替え可能に構成されたPTO正逆クラッチ16kと、前記耕耘体w3の後方で整地作業する整地体w4と、前記耕耘機w3を作業位置まで下降させた場合においても、前記整地体w3を中空の姿勢に維持させることが可能な中空姿勢維持手段w47とを備え、前記作業車両1は、前記耕耘機Wを作業位置まで下降させた状態で、前記PTO正逆クラッチにより前記PTO軸16の回転動力を逆転に切り替えて、前記耕耘体w3を逆回転させながら後進する後進耕耘を実行可能に構成され、前記後進耕耘の実行中、前記中空姿勢維持手段w47により、前記整地体w4を中空の姿勢に維持する。
【選択図】図1
特許請求の範囲
【請求項1】
圃場を走行する走行車体と、前記走行車体の後部に配設された耕耘機と、前記耕耘機を昇降する昇降装置とを備えた作業車両であって、
前記耕耘機を駆動するPTO軸の回転動力を、正転または逆転に切り替え可能に構成されたPTO正逆クラッチを備え、
前記耕耘機は、作業車両の後部に脱着可能に連結される本体と、前記本体に回転可能に設けられ所定方向に回転しながら耕耘作業をする耕耘体と、前記本体に左右方向の軸を中心として上下方向に回動可能に設けられ、前記耕耘体の後方で整地作業する整地体と、
前記耕耘機を作業位置まで下降させた場合においても、前記整地体を中空の姿勢に維持させることが可能な中空姿勢維持手段とを備え、
前記作業車両は、前記耕耘機を作業位置まで下降させた状態で、前記PTO正逆クラッチにより前記PTO軸の回転動力を逆転に切り替えて、前記耕耘体を逆回転させながら後進する後進耕耘を実行可能に構成され、前記後進耕耘の実行中、前記中空姿勢維持手段により、前記整地体を中空の姿勢に維持することを特徴とする作業車両。
続きを表示(約 520 文字)
【請求項2】
前記PTO軸の回転動力を変速するPTO変速部とを備え、
前記後進耕耘の実行時、前記PTO変速部を予め設定された変速比に自動で切り替え、前記耕耘機の高さが予め設定された高さとなるように前記昇降装置を自動制御することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記整地体の回動角度の検出により、耕耘の深さを示す耕深度を検出する耕深センサを備え、
前記後進耕耘の実行中、前記後進センサにより、前記整地体の回動角度の変化が検出されると、前記PTO正逆クラッチにより前記PTO軸の回転動力を切断し、前記耕耘機の駆動を停止し、さらに、機体の走行を停止するよう構成されたことを特徴とする請求項1または請求項2に記載の作業車両。
【請求項4】
前記後進耕耘の実行中、車速が所定の制限速度を超えたときに、自動で所定の制限速度以下となるように機体を制御し、さらに、
所定の時間間隔における前記PTO軸の回転数が所定の制限回転数を超えたときに、自動で前記PTO軸の回転数が所定の制限回転数以下となるように機体を制御するよう構成されたことを特徴とする請求項3に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農作業を行う作業車両に関するものであり、特に、耕耘機を備えた作業車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、例えば、下記特許文献1に示されるように、衛星測位システムから得られる位置情報を利用し、圃場を自動運転しながら農作業(以下、単に作業という。)を行う作業車両が知られている。この種の自動運転式の作業車両は、手動運転と自動運転とを切り替え可能となっており、自動運転時、圃場全体を効率よく走行するため、直進と旋回を交互に繰り返して走行する。
【0003】
また、作業車両は、走行車体の後部に着脱可能な作業機を備えており、この作業機として、例えば、下記特許文献2に記載のように、圃場を耕耘する耕耘機を備えたものが従来より公知である。この従来の耕耘機は、昇降装置によって走行車体に対して昇降可能となっており、圃場の土を耕す耕耘爪と、耕耘爪の上方を覆うロータリカバーと、ロータリカバーの後部に上下動自在に支持されるリヤカバーが設けられ、ロータリカバー上には、作業機による耕耘の深さを検出する耕深センサが設けられている。耕深センサは、ポテンショメータ式のセンサであり、ロータリカバーに対するリヤカバーの回動角度を耕深度として検出可能に構成されている。これにより、作業者が、所定の操作を行うと、耕耘機を昇降して、耕耘の深さを調節することができるよう構成されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-069291号公報
特開2023-048719号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、作業車両は、作業中、畦際で旋回を行う際、耕耘機を非作業位置まで上昇させるとともに、畦と接触することがないように旋回を行い、旋回が完了すると、耕耘機を予め設定された作業位置まで下降させて耕耘を再開する。この際、圃場の端で車両を切り返す場所、所謂、枕地部分については、旋回時に、耕耘機を非作業位置まで上昇させるため、耕耘を行うことができない。
【0006】
したがって、旋回後、作業者が畦際から耕耘を行いたい場合は、旋回の完了後に、一旦、機体を後進させて、耕耘機を畦際まで寄せてから、耕耘機を作業位置まで下降させて耕耘を再開する手間が生じており、作業効率が悪かった。
【0007】
加えて、耕耘機を畦際に寄せるため、耕耘機を非作業位置まで上昇させた状態で、作業車両を後進させると、操縦席からは、上昇した耕耘機が視界を妨げて圃場面の視認性が悪いため、畦際での耕耘機の位置調節が難しく、不便であった。
【0008】
そこで、本発明は、このような問題を解消し、容易に畦際まで耕耘することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、第1の発明は、
圃場を走行する走行車体と、前記走行車体の後部に配設された耕耘機と、前記耕耘機を昇降する昇降装置とを備えた作業車両であって、
前記耕耘機を駆動するPTO軸の回転動力を、正転または逆転に切り替え可能に構成されたPTO正逆クラッチを備え、
前記耕耘機は、作業車両の後部に脱着可能に連結される本体と、前記本体に回転可能に設けられ所定方向に回転しながら耕耘作業をする耕耘体と、前記本体に左右方向の軸を中心として上下方向に回動可能に設けられ、前記耕耘体の後方で整地作業する整地体と、
前記耕耘機を作業位置まで下降させた場合においても、前記整地体を中空の姿勢に維持させることが可能な中空姿勢維持手段とを備え、
前記作業車両は、前記耕耘機を作業位置まで下降させた状態で、前記PTO正逆クラッチにより前記PTO軸の回転動力を逆転に切り替えて、前記耕耘体を逆回転させながら後進する後進耕耘を実行可能に構成され、前記後進耕耘の実行中、前記中空姿勢維持手段により、前記整地体を中空の姿勢に維持することを特徴とする作業車両を提供する。
【0010】
上記第1の発明によれば、後進耕耘により、機体を後進させながら、圃場を耕耘することができるため、容易に畦際まで耕耘することができる。また、このとき、耕耘機が作業位置まで下がっていることにより、耕耘機が作業者の視界を妨げにくく、畦際での耕耘機Wの位置調節を容易とすることができる。加えて、整地体を中空の姿勢で維持させることで、圃場面からの負荷(抵抗)を回避して、破損を防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ